

开源移动机器人装上“大脑”和“眼睛”|中科深谷激光SLAM和导航定位平台正式发布
发布日期:2023-07-10 浏览次数:2302
近年来,移动机器人产品的落地应用不断渗透到各个行业,具备自主移动的机器人需要解决两个核心问题,第一:我在哪;第二:我要如何到达目标点;相应地诞生出两种解决方案,即SLAM和导航定位。SLAM(Simultaneous Localization and Mapping),即同时定位与地图构建,目前被广泛应用于机器人领域,SLAM算法使得机器人处于陌生环境时,能够通过自身搭载的传感器来感知环境信息并建立环境地图,并完成对自身位姿的计算,从而能够在未知环境中进行移动;导航定位技术即通过路径规划等算法实现机器人由当前点规划出一条到达目标点的最优路径,并由车体控制系统控制车辆按照此路径完成路径跟踪。
正是在这一思路的启发下,中科深谷研发工程师开发了激光SLAM和导航定位平台,该平台实现构建出与环境特征一致的高精度地图并在地图上实时输出机器人的位姿信息,主要由硬件算力平台、软件方案和激光雷达传感器等组成。根据激光雷达传感器不同,进一步细分为两个子模块:2D激光SLAM和导航定位子模块,3D激光SLAM和导航定位子模块;2D/3D子模块均支持融合轮式里程计/IMU等信息,其中3D子模块支持融合差分GPS信息。
PART 01 激光SLAM和导航定位平台 室内外大场景3D高精度建图
激光SLAM和导航定位平台支持快速的建图方式,可实现全自动三维高精度导航地图绘制与三维场景建模,建图操作简单、易行,无需过多先验知识即可实现彩色三维点云构建,具备地图自主更新能力。拥有高精度和鲁棒激光SLAM前端激光里程计和后端图优化功能,确保构建出与实际环境高度一致的地图。

激光SLAM和导航定位平台
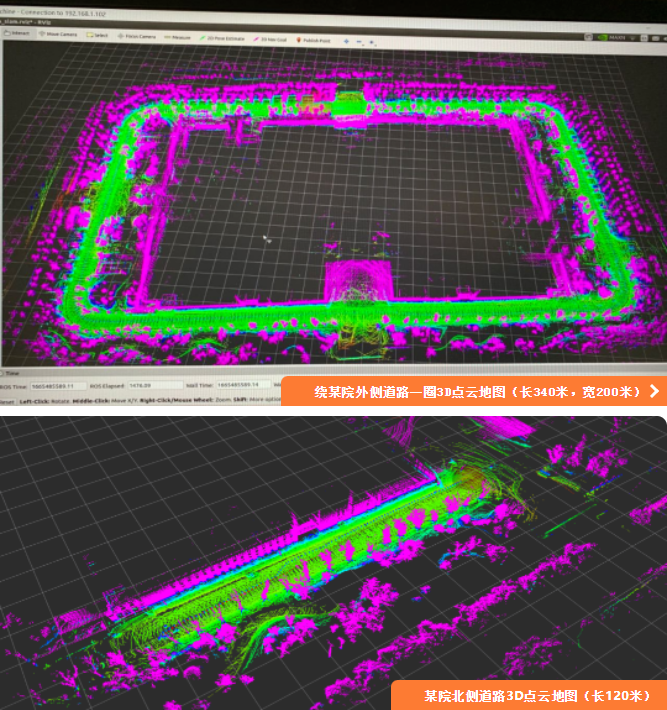

构建不同场景下的3d地图性能
SLAM前端高精度子图构建技术:通过鲁棒的帧间匹配算法,增量式构建子图,并融合特征定位功能,应对稀疏/欠约束环境下的帧间匹配;
SLAM后端闭环匹配技术:通过引入闭环匹配技术,当机器人重新到达原先经过的位置能够通过闭环匹配技术有效识别出闭环约束边,且科学地给出筛选有效闭环约束边的指标,确保将无效闭环边剔除;
SLAM后端图优化技术:当闭环匹配技术有效识别出闭环约束边后,及时进行图优化解算,根据图优化解算结果,进一步将无效闭环约束边剔除;根据图优化解算结果及时更新各子图的绝对位姿,最大化消除SLAM前端增量式子图构建系统的累计误差,进而构建出与环境特征最大化一致性地图。
PART 02 激光SLAM和导航定位核心技术 轻松应对多种复杂环境
从室内走向室外,移动机器人常被应用于自主移动并完成巡检、运输等一系列任务。由于环境更复杂,因此需要更精确、更可靠、更稳定、更负责以及更智能的自主移动导航系统。但在原先,这需要终端客户自购软硬件二次开发,由于接口通用性问题,带来许多集成不便以及高昂的开发和集成成本。
中科深谷推出的激光SLAM和导航定位平台,建立在中科深谷稳定且优越的移动机器人底盘基础上,不仅能轻松应对复杂温度、路况、环境,内置多传感器融合的三维激光自主定位导航算法,定位精度高,抗干扰能力强;无需站点、初始化标定;室内外无缝定位,室外不受四季植被变化影响,室内不受货物增减影响。
支持2D/3D激光雷达传感器,满足室内外多场景下的激光SLAM和定位功能需求。拥有多传感器信息融合功能,确保激光SLAM和导航定位过程中鲁棒性和可靠性,更加满足复杂场景下的建图和定位功能需求。
激光SLAM和导航定位平台基于激光雷达SLAM系统目的在于构建出符合环境特征的高精度地图,基于激光雷达导航定位系统目的在于在已知环境地图上实时输出机器人在地图上的位姿,两者紧密相关,SLAM系统输出的地图精度决定了导航定位系统输出位姿的精度。
激光SLAM系统中前端系统核心在于高精度子图构建技术,通过鲁棒的帧间匹配算法,增量式构建子图,并融合特征定位功能,应对稀疏/欠约束环境下的帧间匹配;后端闭环匹配技术是通过引入闭环匹配技术,当机器人重新到达原先经过的位置能够通过闭环匹配技术有效识别出闭环约束边,且科学地给出筛选有效闭环约束边的指标,确保将无效闭环边剔除;后端图优化技术是当闭环匹配技术有效识别出闭环约束边后,及时进行图优化解算,根据图优化解算结果,进一步将无效闭环约束边剔除,进而构建出与环境特征最大化一致性地图。
激光导航定位通过融合多传感器技术和扩展卡尔曼滤波技术实现稳定可靠性的导航定位功能。

图示2D激光SLAM导航定位示意
激光导航定位主要核心技术点有:
1、多传感器融合技术:导航定位系统中鲁棒的里程计系统是至关重要的,提出一种对当前激光帧数据的有效评估计算模型,实时判断机器人是否处于稀疏/欠约束等环境下,一旦环境特征稀疏/欠约束则融合IMU/轮式里程计/视觉等信息,确保里程计系统的鲁棒性/可靠性/精确性;
2、扩展卡尔曼滤波技术:为了平滑导航系统输出的位姿,基于里程计系统预估的位姿,并根据与地图匹配出的观测位姿,利用扩展卡尔曼滤波技术,融合预测系统和观测系统的位姿信息,达到有效滤除过程噪声和平滑位姿功能;
3、地图自动更新技术:基于原始构建地图定位会存在当环境特征变化较大时,导航定位输出的位姿精度下降或者定位失效;为了更加鲁棒地进行导航定位,有必要实时动态地维护地图,即当激光数据与地图匹配质量不高时,及时更新当前局部环境地图,并及时将环境信息维护到地图中去。
1、3D激光定位技术位姿初始化冷启动功能:利用差分GPS模块提供的初始位姿,供3D激光定位模块实现冷启动位姿初始化功能,有效解决传统的基于地图定位模式下需要手动给定初始位姿问题,大大提升产品易用性;
2、3D激光定位失效时基于GPS信息重新初始化位姿功能:当3D激光定位模块失效时能够及时利用有效的差分GPS信息供定位模块重新进行位姿初始化功能,提升定位模块的稳定性和鲁棒性;
3、3D激光定位融合差分GPS信息位姿输出功能:在3D激光定位模块失效时能进一步融合差分GPS模块信息,反之,在差分GPS信息失效时能进一步融合基于地图的定位信息,进而保证连续稳定的位姿输出功能。
PART 03 深谷开源移动机器人 解锁多种工业应用场景

安防领域——电力巡检机器人

巡检领域——设备巡检机器人

农业领域——农业采摘机器人

物流领域——仓库盘点机器人

工业领域——移动配送机器人

公共领域——智慧消杀机器人
中科深谷激光SLAM和导航定位平台适配中科深谷全系列底盘(四轮四转移动机器人、四足机器人等),实现建图、定位与导航功能,系统与底盘通过CAN通讯接口链接,实现全向运动控制、原地旋转、双阿克曼、横移、斜移等多种运动模式。
支持实验内容
1、构建环境地图实验
- 使用单激光雷达传感器实现对环境地图的构建
- 融合多传感器信息实现对环境地图的构建
2、基于地图定位实验
- 实现基于地图的定位功能实验
- 融合多传感器信息实现鲁棒高效定位功能实验
支持科研方向
- 激光SLAM高精度前端里程计功能设计研究
- 激光SLAM闭环检测功能设计研究
- 激光SLAM后端图优化功能设计研究
- 多传感器融合策略设计研究
- 扩展卡尔曼滤波位姿迭代功能设计研究
-
从应用稳定性、导航精确性、落地成本等多方面因素考虑,激光SLAM无疑是未来导航的发展趋势。而且随着导航技术的更新迭代,多技术的融合将更深入,多导航融合应用的优点也会更加显著。中科深谷将始终以技术创新为驱动,推动激光SLAM和导航定位技术朝着更高柔性、更高精度和更强适应性的方向发展。
未来,中科深谷将持续研发创新,将工业等产业装备设备的硬件、软件、算法等开源开放出来,努力推动教育与产业的融合发展!


