

电机伺服驱动科研实验室
发布日期:2021-04-22 浏览次数:3674
电机驱动伺服是机器人关节中最重要的部分,是决定机器人运动精度及稳定性的重要因素。电机伺服驱动科研室中配置有cSPACE控制与半实物仿真系统与机器人产业中常用的多种电机平台,包括直线电机、轮毂电机、永磁同步电机(PMSM)、异步电机、盘式电机等用于驱动机器人的多种电机平台。cSPACE控制与半实物仿真系统是基于模型设计(MBD:Model-Based Design)典型的产品,可供研究人员进行快速的算法研究。
支持研究方向
高精度伺服驱动控制系统技术研究;
伺服驱动通讯技术研究;
智能化伺服驱动控制技术研究;
电机PI参数整定技术研究;
电机惯性参数及负载参数辨识技术研究;
电机转矩波动抑制技术研究。
I.开源直线电机平台
开源直线电机平台是由工业级高精密直线电机、控制系统和上位机组成。控制系统是基于TI TMS320F28335 DSP和MATLAB/Simulink开发。该平台结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,是基于模型设计(MBD:Model-Based Design)开发,可以完成如LQR最优控制、模糊控制、滑模控制、神经网络控制等运动控制理论的相关实验平台。
平台控制算法代码完全开源,系统提供典型系统的时域响应和稳定性分析、根轨迹、线性系统矫正、PID控制实验和LQR控制,以及直线电机速度控制和位置跟踪等实验内容。可以作为自动化专业、机电专业、电气专业、机器人等专业中《电机学》、《自动控制原理》、《现代控制理论》、《伺服电机与驱动技术》等课程的配套实验平台,也可作为科研工作者检验自动控制算法的科研平台。
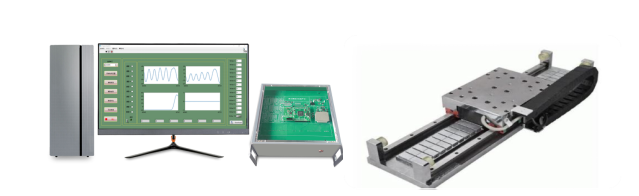
开源直线电机平台
产品特点
工业级高精密直线电机,推力输出线性度好,数学模型精确,无机械传动干扰;
基于MBD工程开发方法。建模、算法设计、仿真、代码生成和下载等均在MATLAB/Simulink上完成;
开放式控制开发框架,代码开源,支持用户自主开发算法,如PID、LQR、滑模、模糊、神经网络等控制算法,提供开发应用实例;
支持用户摆杆伸缩定制,支撑系统建模、经典控制理论、现代控制理论、最优控制和智能控制等实验。
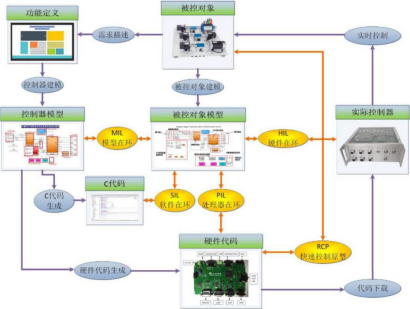
开发概图

开发流程图
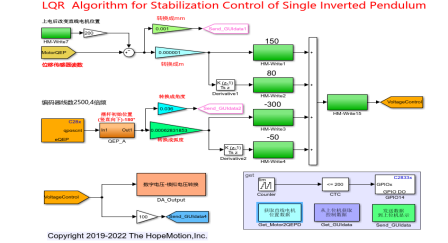
Simulink模型图
II.轮毂电机综合性能测试分析实验平台

轮毂电机控制实验室实物图
产品概述
轮毂电机综合性能测试分析实验平台由带编码器和霍尔传感器的轮毂伺服电机、力矩传感器、磁粉制动器、伺服驱动器、上位机软件组成,系统是基于MATLAB/Simulink进行开发,能实现自动代码生成,实现电机的电流和速度双闭环的实时控制,拥有上位机监控界面,能在线调节控制参数和保存采集的数据。

平台可以进行FOC磁场定向控制,SVPWM三相电流和逆变控制、电流、速度PID双闭环等算法的研究,也可以对电机的机械特性、电气特性进行测量和分析的综合的平台。代码开源,支持二次开发,可以作为教师科研平台,进行电机驱动、动力学控制等电机高级控制算法的研究。
产品特点
桌面式的轮毂伺服电机驱动器开发和带扭矩传感器的性能测试平台;
基于模型设计(MBD:Model based design)的快速控制原型开发系统的工程设计方法,基于嵌入式(TI TMS320F28335 DSP)和MATLAB/Simulink进行开发;
完整的硬件、软件实验环境,提供全开放式的软硬件接口,丰富的可扩展性;
支持FOC、SVPWM、PID等电机驱动和控制算法;
自动生成代码,变量在线观测、参数自动保存、参数在线修改等功能;
提供丰富的TI DSP的原理、开发与应用知识案例。
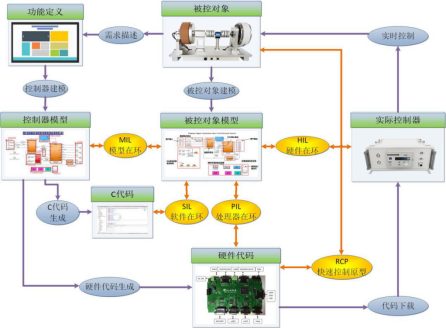
开发概图
开发流程图

Simulink控制模型图
III.永磁同步电机驱动控制综合实验平台

多电机驱动控制综合实验室实物图
产品概述
永磁同步电机驱动控制综合实验平台是基于TMS320F28335 DSP和MATLAB/Simulink开发。由永磁同步电机对拖平台(含高性能扭矩传感器)、电机驱动控制实验箱、上位机和软件包组成。硬件原理图全部开源;软件包提供开源的电机驱动控制程序。

系统提供电机驱动控制仿真、信号采集、PWM产生、坐标变换和FOC磁场定向控制、恒压频比调速、电流环、速度环和位置环等内容,可支撑科研工作者开发新型的电机控制模型和算法的科研平台。
永磁同步电机驱动控制综合实验平台
产品特点
软硬件底层全部开源,方便二次开发。
基于TI DSP嵌入式和MATLAB/Simulink软件开发,在Simulink中进行模块化编程实现电机的驱动控制,验证各种算法,自动生成代码。
电路模块化设计,可插拔,具有各种编码器接口,信号方便用万用表和示波器观测。
支持PWM和SVPWM、矢量控制等电机驱动控制算法。
支持PID、电流环、速度环、位置环等控制算法。
可通过上位机在线观测、记录、修改参数。
可以实现对拖,施加可变负载,研究高级控制算法在可变负载下的伺服性能。
开发概图
开发流程图

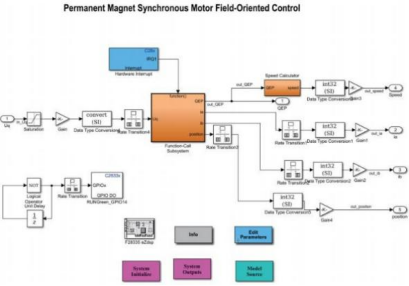
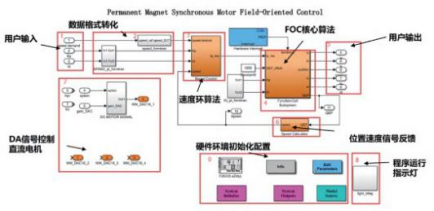
永磁同步伺服电机带载速度闭环模型
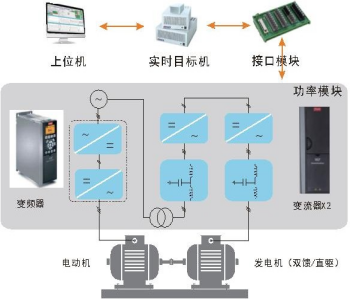
IV.功率级电机对拖性能研究与半实物仿真开发系统

功率级电机对拖实验室实物图
产品概述
功率级电机性能测试实验平台是能实现采用扭矩传感器测量电机的性能、两个电机互为负载的电机驱动和控制算法开源的实验平台。该平台是基于TI TMS320F28335 DSP和MATLAB/Simulink的图形化编程,结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能。
该平台能自动生成DSP代码,拥有上位机监控界面,能在线调节控制参数和保存采集的数据,底层代码开源,是以新能源、电力拖动和电动车辆工程应用为背景的一个开放式产品平台。不仅能用于构建机器人、各种电机、汽车电子、电力电子、机械装备等的电机驱动器快速控制原型开发系统,而且能用于电机性能测试、高级电机控制算法研究的平台。
开发流程图
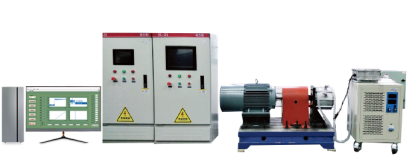
实物场景图
产品特点
采用MBD方法开发,能实现硬件在回路(HIL)和快速控制原型(RCP)设计方法;
基于TI TMS320F28335 DSP,丰富的硬件外设支持,拥有高性能的旋转变压器信号采集、SPI、CAN、串口等处理模块;
采用MATLAB/Simulink基于模型的设计开发,支持Simulink自动DSP代码生成;
可在线修改多个变量,实时显示多个变量并自动存储数据;
驱动器控制接口开放,控制接口包括三路PWM信号,1路输出使能信号和1路故障反馈信号;
驱动器及其控制接口板卡自供电,具有过压、短路和过温等完善的保护功能;
是进行电机原理、驱动控制算法、MATLAB快速控制原型开发和DSP软硬件学习和研究很好的实验平台,研究人员也可以快速利用这套系统驱动其它类型的电机;
提供电流和速度闭环控制Simulink软件以及DSP源代码;
并网逆变器(grid-tie inverter,简称GTI)可以将直流电转换给交流电,并且其输出的交流电可以和和市电的频率及相位同步,因此输出的交流电可以回到市电;
应用领域广泛、操作便捷、性价比高。
开发概图
基于Simulink的伺服电机电压开环模型
基于Simulink的伺服电机速度闭环模型
V、机械臂关节电机驱动控制实验平台
产品概述
机械臂关节模组是由伺服驱动器、无框力矩电机、谐波减速机、光电编码器(减速机前)、绝对值编码器(减速机后,测量机械臂的输出轴的绝对角度)和继电器抱闸等部件组成,并集成在一个关节中,很适合组装成多轴机械臂,也可以作为其它自动化设备使用。其具有传动效率更高,结构紧凑,能实现更大的连续转矩和瞬间扭矩输出,具有“小身材,大力气”、高精度的特点。
结合公司多年沉淀的丰富的驱动器和嵌入式电控方面的开发经验,机械臂关节模组通过高度集成的机电一体化设计和驱控一体化设计,可以作为工业型、服务型机器人、传统车辆、作业车辆的远程驾驶和自动驾驶改造等系统集成商的优选产品。降低客户对机械选型、设计、组装多个环节的人员和时间投入。



机械臂关节电机驱动控制实验平台
产品特点
小巧符合工业型、服务型机器人结构紧凑、运动灵活、大扭矩的设计特点;
机电一体化设计、驱控一体化设计,最大化减少机器人关节重量;
关节模组输出端重复定位精度0.001º;
断电后自动锁住电机轴,关节模组位置锁定;
输出连续扭矩为10~200N.m。额定转速最高可达40RPM,加速度可达10RPS/S;
常规为48VDC供电,24~60VDC之间供电可选。满足服务型机器人等电池供电的特点;
CAN总线通信,支持大部分主流机器人控制器;
提供功能完善的监控软件,功能包括三环PI参数设置和控制效果观测,电流、速度、位置测试、绝对值编码器显示、电流等参数设置。
相关概图
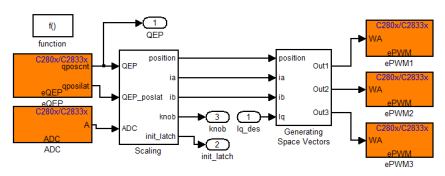
Simulink算法框图
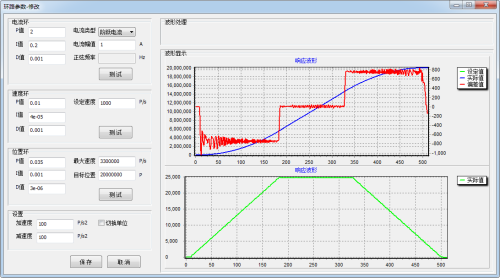
监控界面
在关节模组伺服电机动态跟踪角度,即每个位置控制周期(控制周期为1ms)给定一个新的角度值,实际的角度值和设定的角度值的偏差,在匀加速阶段,为800个脉冲左右(转动一圈有80000,八万个脉冲),匀速阶段为50个脉冲左右,对应实际的机械臂末端的角度为0.036°和0.00225°左右,达到国内外先进水平的动态跟踪的伺服性能。
- 上一篇:复杂动力学控制算法实验室
- 下一篇:无


