

复杂动力学控制算法实验室
发布日期:2021-04-22 浏览次数:3203
建设目的
机器人动力学控制算法是实现机器人高级功能的必要技术,也是机器人领域的研究热点。复杂动力学控制算法实验室配置有直线电机一级(二级、三级)倒立摆、可变杆长直线电机倒立摆、旋转电机倒立摆、开源三轴机械臂等验证机器人复杂动力学控制算法的科研平台。
支持研究方向
LQR控制算法研究;
模糊控制算法研究;
鲁棒控制算法研究;
神经网络控制算法研究;
滑模控制算法研究;
自适应鲁棒控制算法研究;
基于模型的动力学控制算法研究。
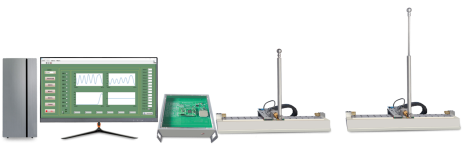
I.开源直线电机一级(二级、三级)倒立摆系统

直线电机倒立摆实验室实物图
产品概述
开源直线电机一级(二级、三级)倒立摆(型号:LIP1(2/3))是由工业级高精密直线电机、角度传感器、摆杆、控制系统和上位机组成。控制系统是基于TI TMS320F28335 DSP和MATLAB/Simulink开发。该平台结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,是基于模型设计(MBD:Model-Based Design)开发,可以完成如LQR最优控制、模糊控制、滑模控制、神经网络控制等运动控制理论的相关实验平台。
平台控制算法代码完全开源,系统提供典型系统的时域响应和稳定性分析、根轨迹、线性系统矫正、PID控制和LQR控制,以及直线电机速度控制和位置跟踪等实验内容,可作为科研工作者检验自动控制算法的科研平台。


开源直线电机一级(二级、三级)倒立摆
产品特点
工业级高精密直线电机,推力输出线性度好,数学模型精确,无机械传动干扰;
基于MBD工程开发方法。建模、仿真、代码生成和下载等均在MATLAB/Simulink上完成;
开放式控制开发框架,代码开源,支持用户自主开发算法,如PID、LQR、滑模、模糊、神经网络等控制算法,提供开发应用实例;
支持摆杆伸缩定制,支撑系统建模、经典控制理论、现代控制理论、最优控制和智能控制等实验。
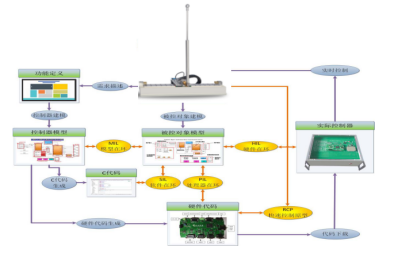
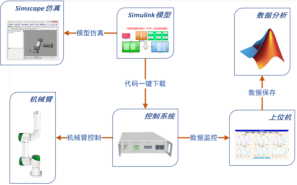
开发概图
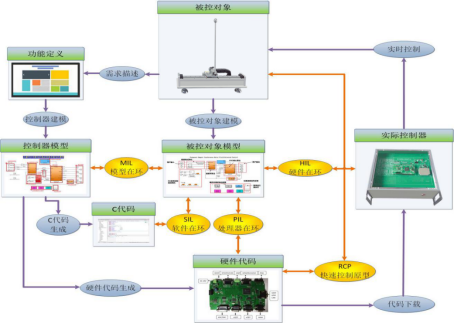
开发流程图
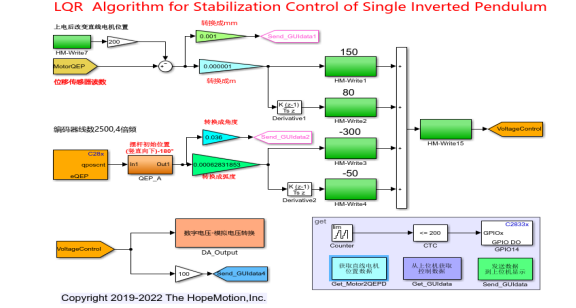
Simulink模型图
II.可变摆杆直线电机一级倒立摆系统
产品概述
可变摆杆直线电机一级倒立摆系统(型号:RIP1)是由工业级高精密直线电机、角度传感器、连续可变摆杆、控制系统和上位机组成。控制系统是基于TI TMS320F28335 DSP和MATLAB/Simulink开发。该平台结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,是基于模型设计(MBD:Model-Based Design)开发,可以完成如LQR最优控制、模糊控制、滑模控制、神经网络控制等运动控制理论的相关实验平台。
平台控制算法代码完全开源,系统提供典型系统的时域响应和稳定性分析、根轨迹、线性系统矫正、PID控制和LQR控制,以及直线电机速度控制和位置跟踪等实验内容,可作为科研工作者检验自动控制算法的科研平台。
产品特点
摆杆长度可自由伸缩,伸缩长短可定制,方便老师和学生研究在连续可变模型下的系统相关特性实验。支撑系统建模、经典控制理论、现代控制理论、最优控制和智能控制等实验;
工业级高精密直线电机,推力输出线性度好,数学模型精确,无机械传动干扰;
基于MBD工程开发方法,建模、仿真、代码生成和下载等均在MATLAB/Simulink上完成;
开放式控制开发框架,代码开源,支持用户自主开发算法,如PID、LQR、滑模、模糊、神经网络等控制算法,提供开发应用实例。
开发概图
开发流程图

Simulink模型图
III.开源旋转电机一级倒立摆系统
产品概述
开源旋转电机一级倒立摆(型号:LIP3)是基于TI TMS320F28335 DSP和MATLAB/Simulink开发。该平台由交流伺服电机、角度传感器、摆杆、控制系统和上位机组成。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,是基于模型设计(MBD:Model-Based Design),可以完成如LQR最优控制、模糊控制、滑模控制、神经网络控制等运动控制理论相关实验的教科研平台。
该平台控制算法代码完全开源,提供典型系统的时域响应和稳定性分析、根轨迹、线性系统矫正、PID控制实验和LQR控制,以及直线电机速度控制和位置跟踪等实验内容,可作为科研工作者检验自动控制算法的科研平台。

开源旋转电机一级倒立摆
产品特点
开放性:基于TI TMS320F28335 DSP和MATLAB/Simulink开放式控制开发平台,实验案例代码开源,支持用户自主开发算法,包括PID、LQR、滑模、模糊、神经网络等控制算法。
基于MBD的工程设计方法:建模、仿真、代码生成和一键下载均在MATLAB/Simulink上完成;
实验案例丰富:系统建模实验、经典控制理论实验、现代控制理论实验、最优控制实验和智能控制等实验;
知识点详实:提供数据建模、自动控制、建模仿真、MATLAB/Simulink和TI TMS320F28335 DSP的开发与应用等知识。
开发概图

开发流程图

Simulink模型图
IV.开源三轴机械臂系统(拟人臂)
产品概述
开源三轴协作机械臂系统(拟人臂型号:ROCR3)是基于TMS320F28335 DSP和MATLAB/Simulink开发的教科研平台。其由机械臂本体(3个机械臂关节及其连杆和底座)、控制系统、上位机和稳压电源组成。每个机械臂关节由谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器和伺服驱动器组成。该机械臂系统使用全自主研发的关节驱动器及运动控制器,为教学和科研提供优越的开放性支撑。
该系统控制算法源代码开源,提供丰富的运动学、动力学控制实验以及伺服电机控制实验案例,如正逆运动学实验、单双关节PID动力学算法实验、单关节自适应控制算法实验以及单双关节零力拖动实验等,该系统可以作为相关专业和课程的运动学、动力学及伺服驱动算法的科研平台。

开源三轴机械臂系统
产品特点
伺服性能优良,重复定位精度高,机械臂易于安装,使用便利。
工业产品化的设计,工业机械臂产品标准。
控制器采用MATLAB/Simulink软件进行编程,用户可以更好更快地研究控制算法。
控制器采用CAN总线通讯,控制周期可以短到1.5ms。
提供交流伺服驱动器的电流、速度、位置三闭环的伺服控制方法、以及梯形加减速等运动控制算法。
可进行零力拖动等高级动力学算法和机器人关键技术的开发。
开发概图
开发流程图
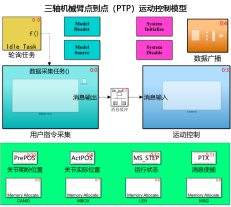
Simulink模型图
- 上一篇:机器人建模与控制科研实验室
- 下一篇:电机伺服驱动科研实验室


