

机器人建模与控制科研实验室
发布日期:2021-04-22 浏览次数:3072
机器人的动力学建模是机器人实现动力学控制高级算法的前提,常用的求解机器人动力学方程的方法有牛顿-欧拉法、拉格朗日法等,对于多轴串/并联机器人,如何求解精确的机器人动力学模型是当前的研究热点之一。机器人建模与控制科研实验室配置有高级开源六轴协作机械臂系统、开源七轴协作机械臂系统,可为研究机器人建模与控制提供良好的科研平台。
支持研究方向
多轴串/并联机器人动力学建模技术研究;
机器人参数辨识技术研究;
基于力传感器的机器人动力学控制技术研究;
机器人阻抗/导纳控制技术研究;
机器人力位混合控制算法研究;
机器人运动学正逆解算法研究。
I.高级开源六轴协作机械臂系统(带关节扭矩传感器)
产品概述
带力控开源六轴协作机械臂系统,主要由带六个机械臂关节模组的本体、每个关节的法兰输出安装有扭矩传感器、伺服驱动器、运动控制器、监控软件、控制算法组成。机械臂的结构小巧,一体化的驱动器和六轴运动控制器核心技术全自主研发。
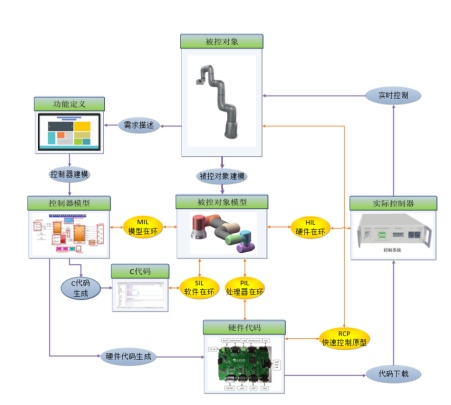
控制器采用cSPACE快速控制原型开发系统,软件部分是基于TI AM437x RT-Linux和MATLAB/Simulink开发,结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能。
伺服驱动器采用TI TMS320F28069 DSP开发,伺服性能优良,单关节采用20000线的增量式编码器、17位的绝对值编码器,分辨率小于0.001°,单关节的重复定位精度优于0.005°。自主开发的伺服驱动器,为教学和科研提供优越的开放性支撑。
机械臂的重复定位精度优于±0.03mm,易于安装布置,使用便利,性价比高,末端位置和运动轨迹支持C语言编程进行设置,也支持通过Ethernet、CAN和RS232总线通讯传输目标位置信号,进行视觉抓取、搭载在AGV上进行移动作业的应用。
系统控制算法代码开源,提供丰富的运动学、动力学控制实验以及伺服电机控制实验案例,如正逆运动学实验、关节空间和笛卡尔空间轨迹算法实验、单双关节PID动力学和自适应控制算法实验以及零力拖动实验等。该系统可以支撑相关专业和课程的运动学、动力学建模与控制相关算法的研究。
开发概图
高级开源六轴协作机械臂系统
产品特点
开源成熟协作机械臂产品为实验载体,支撑机器人建模仿真、机器人学、机器人控制、机器人动力学等实验,以及科研领域的算法验证实验和振动分析的控制实验等。
单关节模组由谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器、驱动器等组成,伺服驱动器提供电流、速度、位置工作模式,可以支持机械臂运动学、动力学的研究,也可支持直流供电的交流伺服驱动器的电流、速度、位置三闭环的伺服控制方法、以及梯形加减速等运动控制算法的研究。
控制器采用cSPACE进行开发,提供EtherCAT或CAN总线通讯接口可供选型,控制周期可以小到2ms。控制器硬件基于ARM Cortex-A9,性能优良,运算能力强,采用Matlab/Simulink软件进行编程,可以更好更快地研究高级自动控制算法。
提供丰富的机械臂运动学、动力学控制案例,方便地掌握机械臂控制系统的技术,进行更深入的研究。
可进行参数辨识、柔顺控制、零力拖动示教、碰撞保护检测等高级动力学算法和机器人关键技术的开发。
提供拉格朗日模型、PID、自适应控制、带摩擦力和重力补偿等动力学实验。
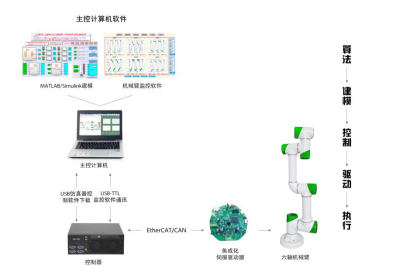
控制系统和算法框图

六轴机械臂Simulink软件仿真图

六轴机械臂硬件系统结构图

六轴机械臂快速控制原型开发系统
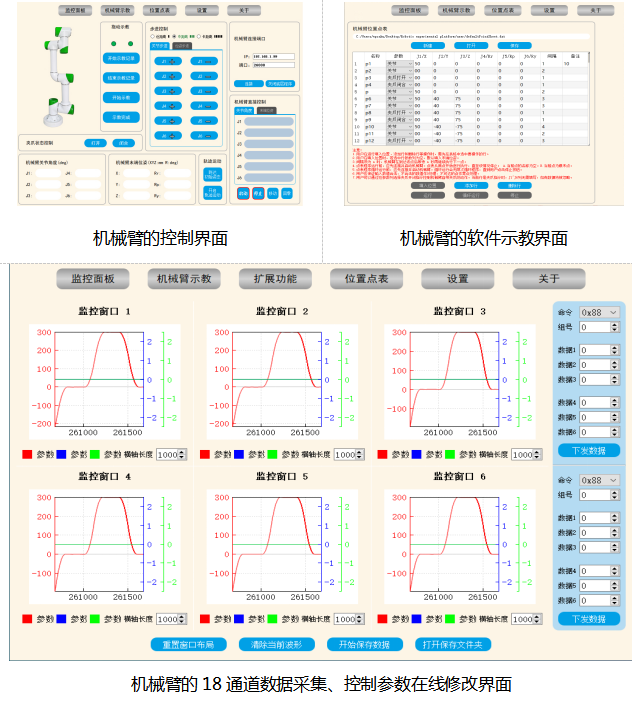
上位机软件:
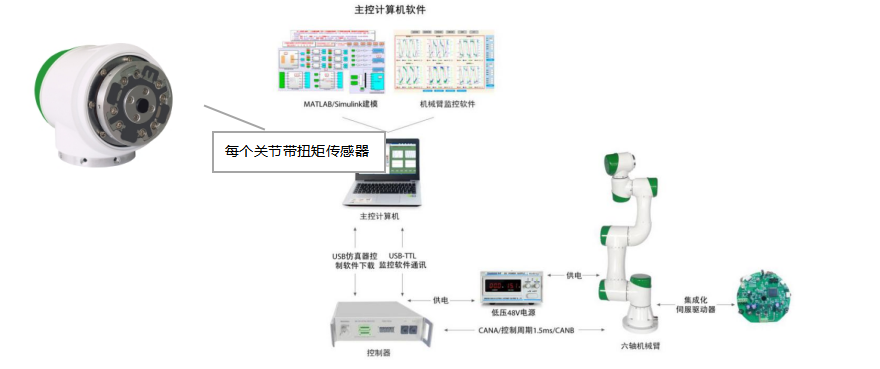
带关节力传感器六轴机械臂系统(力控版)
机械臂关节内均内置扭矩传感器,可实时反馈高质量扭矩信号,并进行扭矩控制。扭矩信号、每个关节的电流和角度信号均可在机械臂的控制器中(可使用Simulink图形化开发)进行采集和配套的监控软件进行显示,研究人员可以进行机械臂相关高级科学研究:
机器人动力学建模:根据高级开源六轴协作臂的CAD参数对机械臂进行DH参数建模,并获取动力学参数,根据牛顿-欧拉法、拉格朗日法等进行动力学建模,然后进行动力学正逆解运算,在高级开源六轴协作机械臂系统上进行验证;
阻抗控制:调节末端执行器的位置和接触力之间的动态关系来实现柔顺控制,满足装配、打磨、擦洗、接触性的检测如机械臂带超声波探头进行B超检测等的应用需求;
力/位混合控制:基于将末端执行器的坐标空间按其是否被环境约束而分为位置子空间和力子空间,力/位置控制方法通过控制末端执行器在位置子空间的位置和在力子空间的力来实现顺应控制;
碰撞保护:能达到5~10N灵敏度的外部力的碰撞保护,确保安全性;
拖动示教:采用各关节的扭矩信号,能更加灵敏地实现拖动示教功能;
精确测量负载,作为重力补偿,提升动力学控制的性能;
进行深入的机械臂动力学参数辨识的研究。
典型应用
接触性的检测如机械臂带超声波探头进行人体B超检测的应用需求;
光学零件等精密打磨;
精密装配:如内存条和CPU在电脑主板的装配、手机屏幕装配、自动按压装配防护膜等;
抛光:精密零部件的表面抛光等;
其它典型应用:精密贵重产品表面的擦洗、试管液体的分液(扭矩传感器能测量被抓物体的质量,从而测量分液的质量)。
II.开源七轴协作机械臂系统
产品概述
开源七轴协作机械臂系统(型号:ROCR7-II)是为了适应日益复杂的工业环境应用,真实还原人类手臂,最新推出的一款开源机械臂系统。该系统由七轴机械臂本体、控制系统、上位机软件和稳压电源组成。每个机械臂关节由谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器和伺服驱动器组成。控制系统是基于AM437x RT-Linux设计。机械臂系统使用完全自主研发的关节驱动器及运动控制器,为教学和科研提供优越的开放性支撑。
系统控制算法代码开源,提供丰富的运动学、动力学控制实验以及伺服电机控制实验案例,如正逆运动学实验、轨迹规划实验、关节PID动力学算法实验、单关节自适应控制算法实验以及零力拖动实验等。除此之外,因七轴机械臂本身的特点,该系统还支持进行奇异点躲避、关节速度均匀分配、障碍躲避(在不改变末端机构位置的情况下改变末端机构姿态)、关节力矩分配(静力平衡)、运动学及动力学容错等复杂场景的应用研究。
该系统可以支撑相关专业和课程的运动学、动力学及伺服驱动算法、多轴串/并联机器人动力学建模与控制的科研工作。

开源七轴协作机械臂系统
产品特点
开源成熟工业机械臂产品为实验载体,支撑机器人建模仿真、机器人学、机器人控制、机器人动力学等教学实验,以及科研领域的算法验证实验和机械谐振分析的控制实验等;
伺服性能优良,重复定位精度高,机械臂模块化设计,易于安装,人机交互友好,使用便捷;
控制系统采用MATLAB/Simulink软件进行编程,用户可以更好更便捷地研究控制算法,并可支撑更高级的控制算法验证;
控制系统采用工业EtherCAT总线通信,可支持其他工业机械臂本体的控制;
提供交流伺服驱动器的电流、速度、位置三闭环的伺服控制方法、以及梯形加减速、EtherCAT总线通讯等运动控制算法。
机械臂尺寸
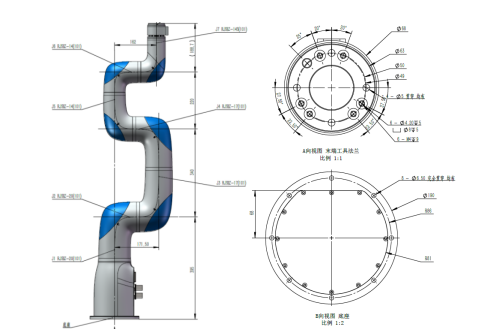
开源七轴协作机械臂尺寸
设计框图
- 上一篇:基于ROS的机械臂视觉抓取系统
- 下一篇:复杂动力学控制算法实验室


