

车规级无人驾驶智能车
发布日期:2023-09-16 浏览次数:1846
产品概述
2021年被业界称为自动驾驶商业化元年,自动驾驶已在Robobus、Robotaxi、港口、封闭园区、矿区、环卫、干线物流、末端配送、工厂自动化生产、军用战车、抢险救灾等场景得到越来越广泛的应用,国内自动驾驶赛道迎来了商业化运营阶段的“下半场”。
车规级无人驾驶智能车是为开发自动驾驶先进技术和场景落地产品而设计,由四驱四转底盘本体和控制系统、转向系统、行车制动、驻车系统和监控软件等组成。其中,底盘控制系统采用恩智浦的车规级MCU进行控制;转向系统采用360W功率转向电机,线控转向精度高,响应时间短(97ms);行车制动系统采用270W功率电机,制动精度高,响应时间在100ms以内;线控底盘采用四轮独立驱动、前后阿克曼线控转向方式,预留上装 CAN 控制指令拓展接口;监控软件可监控整车参数并进行指令下发。
该底盘既可以作为车辆工程、自动化、机器人、机械电子、智能制造等专业中《无人驾驶技术》、《移动机器人技术》、《机器人操作系统》等课程的配套实验平台,也可支撑自动驾驶、车路协同、远程控制、多车协同控制等高级功能的研究。
系统组成与架构

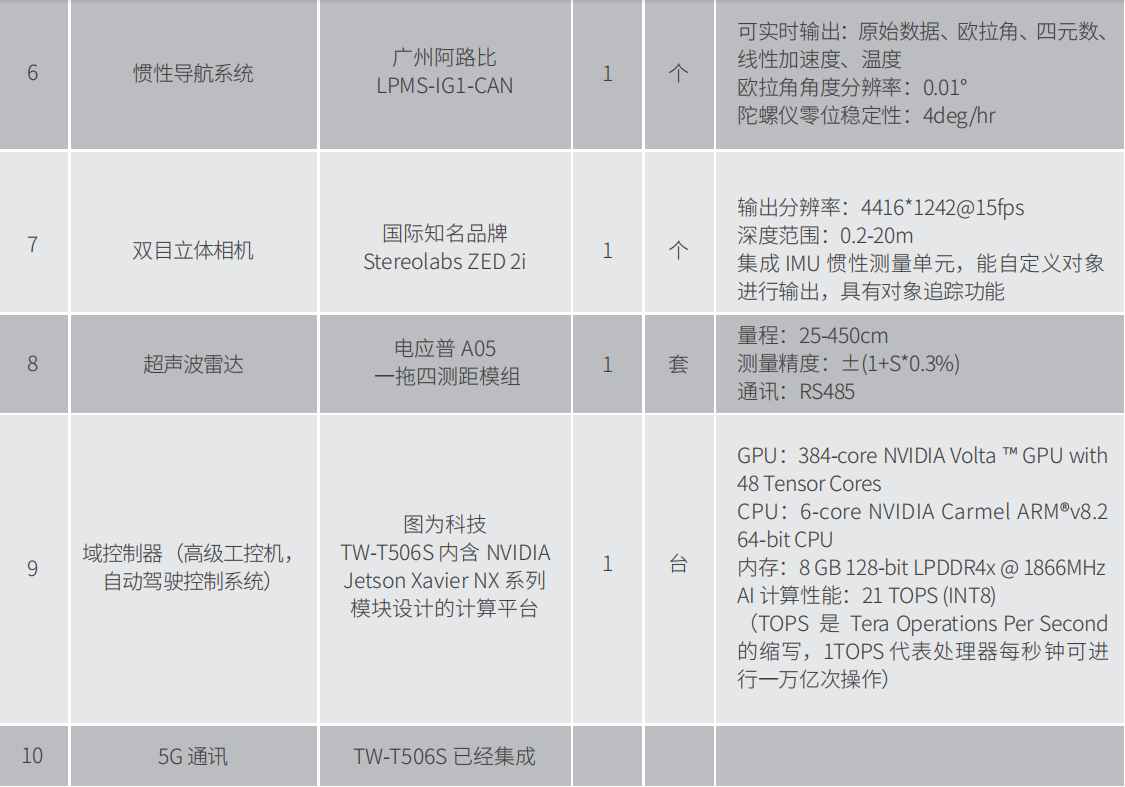
无人驾驶智能车系统由车规级四驱四转线控底盘、16线激光雷达、毫米波雷达、惯性导航系统、双目立体相机、差分GPS定位系统、自动驾驶系统(选配)、5G远程控制系统和高性能工控机等组成。
系统架构
系统按照功能主要分为三大部分:感知子系统、决策子系统和执行子系统。
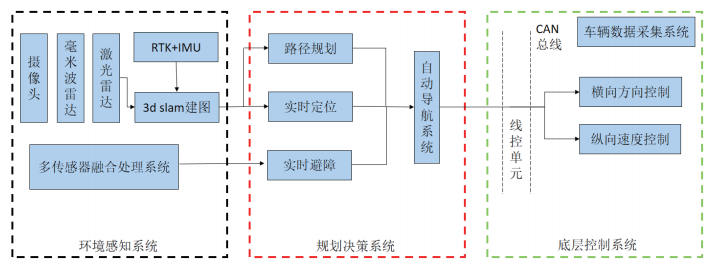
感知系统
智能车的感知系统是利用车辆周围安装的传感器进行环境地图的构建及环境信息的探测和识别处理,主要包括传感器模块、建图模块和多传感器数据实时融合处理模块。
(1)传感器模块
车体主要传感器模块有:激光雷达、毫米波雷达、双目立体相机、组合惯导(IMU+RTK)和里程计。
1. 激光雷达:提供高精度的环境障碍物探测点云数据,其功能兼顾建图和车体周围环境实时扫描检测和识别。
2. 双目立体相机:主要提供前置方向的目标物检测识别信息,与激光雷达数据进行融合处理。
3. 毫米波雷达:主要提供前置方向的目标物体检测,与激光雷达和双目立体相机融合处理,低速智能车上为选配传感器。
4. 组合惯导(IMU+GPS):提供位姿变化及辅助定位信息。
5. 里程计:提供车辆运动距离信息,系统采用高精度多传感器融合技术,集成双激光雷达、高精度IMU、GNSS和SLAM算法实现室内外一体化测量。
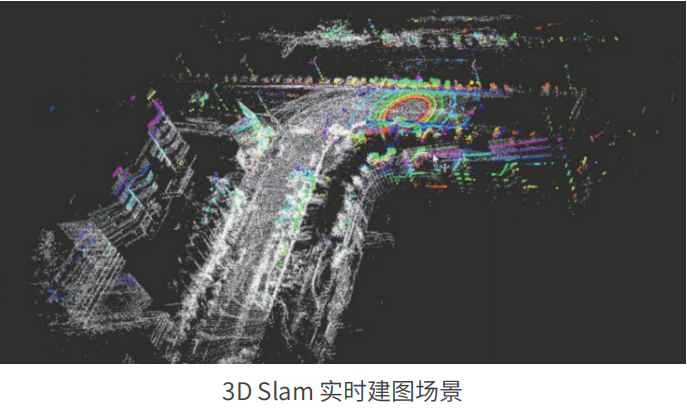
(2)Slam建图模块
以车顶多线激光雷达为主传感器对车辆工作的区域环境进行扫描探测,利用激光3d slam技术进行大场景增量实时地图建模,从而为路径规划和后端匹配定位提供精确的三维激光高精地图信息。
决策系统
决策系统算法的核心任务是基于感知层系统算法的输出结果,给出最终的行为/动作指令,包括行为决策(车辆的跟随、停止和追赶)和动作决策(车辆的转向、速度等)等,具体功能包括实时避障、实时定位和路径规划导航。
(1)实时避障模块
智能车在全局路径自动导航过程中遇到前方动态障碍物目标以及路面路况信息,根据感知模块的输出结果,避障模块做出局部路径规划实时避开障碍物,做出决策行为。
(2)定位模块
按照不同的定位实现技术,高精度定位包含三类:第一类,基于信号的定位,即GNSS全球导航卫星系统;第二类,航迹推算,依靠IMU等,根据上一时刻的位置和方位推断现在的位置和方位;第三类是环境特征扫描匹配,基于激光雷达的定位,用观测到的特征和数据库中的特征和存储的特征进行匹配,得到现在车的位置和姿态。
(3)路径规划导航
路径规划导航是智能车核心功能,也是决策系统的主要功能。主要包括路线规划、行为规划、运动规划、物理控制四个方面。
执行系统
执行系统主要实现的是根据融合决策系统给出的路径规划信息完成航迹跟踪运动和车辆模型控制。而后根据智能车辆底盘的运动模型,将解算出的线速度和角速度进行平稳控制。其中主要的航迹跟踪算法框图如下:

车规级四驱四转线控底盘
车规级四驱四转线控底盘采用恩智浦的MCU作为主处理器进行控制,采用响应时间更短、更安全的前后液压盘式线控制动及线控电子驻车系统(EPS);车体采用Q235型材焊接,为框架式结构,电泳黑漆车架,稳定性和耐磨性更强;采用线控前后双转向器,线控电动转向方式能实现极小转弯半径的阿克曼转向;采用带前后双叉臂,铝合金摆臂、螺旋弹簧减震器的悬架设计,能适应更多的路面;动力和越野能力强;四轮转向的设计,运动灵活,轨迹跟踪精度高(尤其适合自动行驶)。
可以通过CAN接口实现线控底盘的控制,提供航模遥控器的遥控功能和无线监控软件监控功能。底盘结构稳定,内部空间大,载重能力强,转向灵活,集成了多种底盘的优点于一体。通过扩展上装部分,可以形成室外物流配送、载人小车等的研究。

主要参数


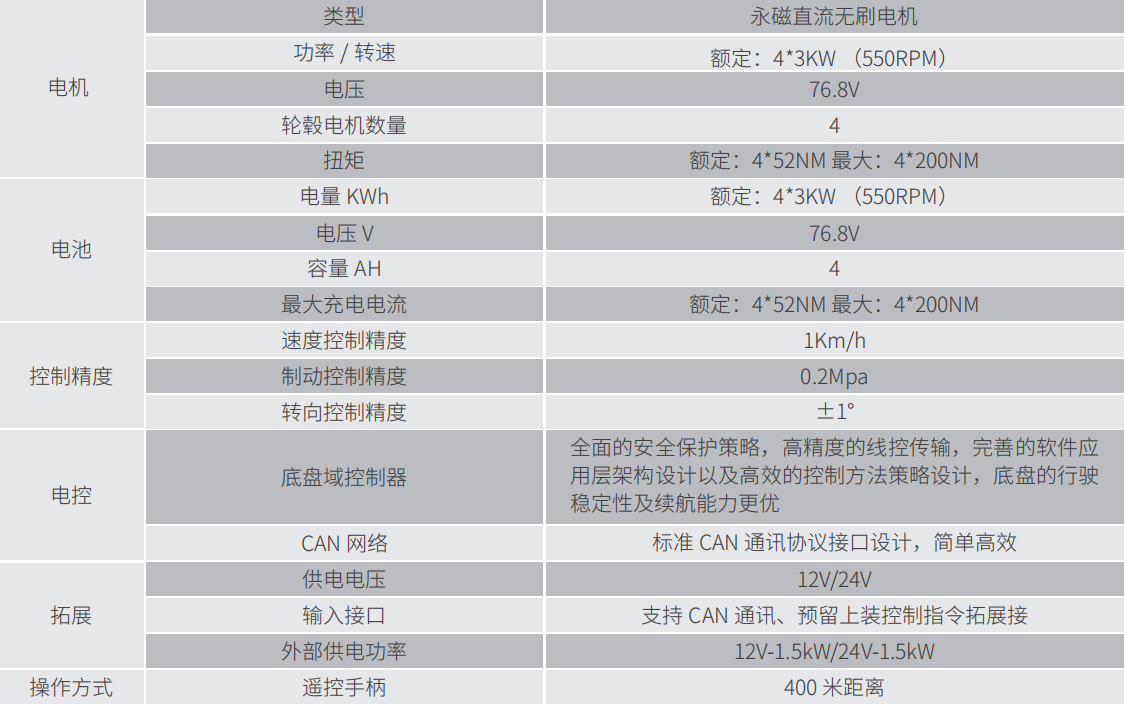
主要部件参数

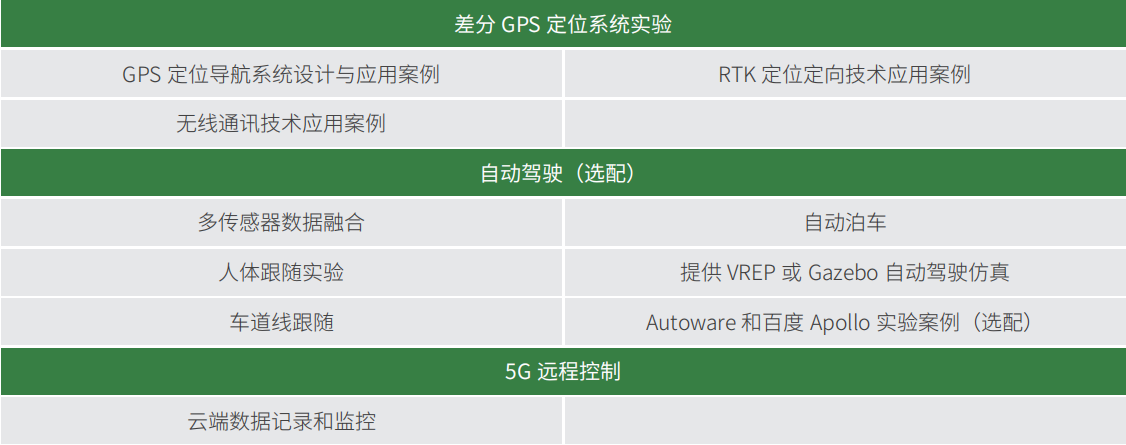
实验内容

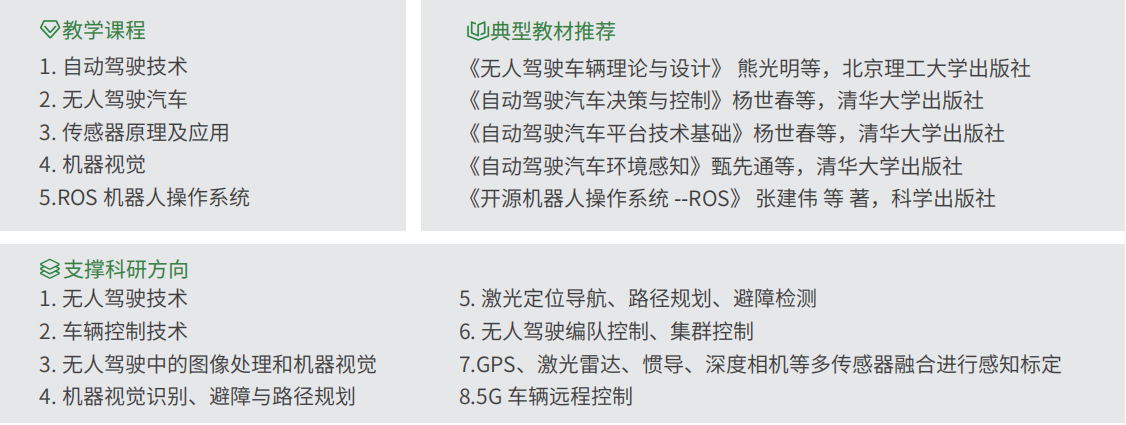
支撑的教学科研
- 上一篇:开源四足机器人
- 下一篇:自平衡无人驾驶智能电动车


