

液压重载多足类机器人
发布日期:2023-09-16 浏览次数:1834
产品概述
液压重载多足类机器人是由机械系统、液压系统、控制系统三大部分组成,其中机械系统包括:撑网系统、锚固系统、地面支撑系统和动力及转弯系统组成,能实现迈步式行走功能,包括前进、后退、转弯,主要用途是在隧道和矿井中的安全实验,包括:
1、可调整子巷道高度不同,模拟实际巷道凹凸不平工况下的支护实验;
2、可将子巷道对装备向下施加的力不同,模拟装备对软硬岩石巷道的支护实验;
3、各子巷道可以对装备进行冲击加载实验,模拟巷道岩石掉落对装备稳定作业的影响等。
该机器人系统使用全自主研发的控制系统,为教学和科研提供优越的开放性支撑。系统控制算法和软件开源,提供丰富的电机控制和液压伺服控制实验案例,如PID算法实现电机的电流和速度闭环控制实验、电机自适应控制实验等。该系统可作为支撑液压伺服系统、矿山液压掘锚支机器人的科研平台。
平台硬件组成
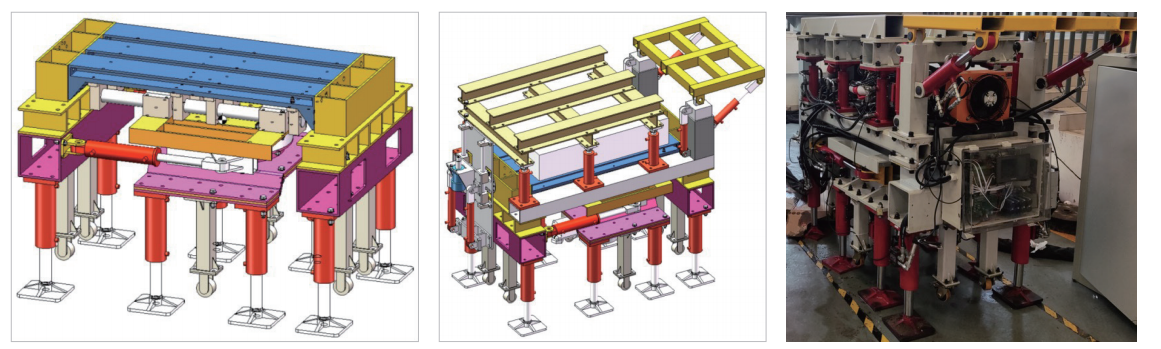
机械结构
巷道尺寸:巷道长2.2米,宽1.6米,高1.8米,由3段子巷道拼装而成。总机尺寸:长2.2米,宽0.9米,高1.5米,重约:2.8t。可实现迈步行走和转向;可完成超前支护和临时支护功能的模拟实验;可实现行走,智能控制实验。
液压系统
整个液压系统包含8个支腿液压缸,2个推进缸,4个超前支护液压缸,6个拱形支护液压缸,2个锚固钻进液压缸,1个锚固液压马达,1个回转液压马达,4个巷道支腿液压缸。
根据控制流程,负载系统使用一个液压泵站,其他系统使用一个液压泵站(柱塞泵)。行走系统的支腿分为两组,共需2个液压阀组,推进缸需1个液压阀组,支护系统需要升降和角度2个液压阀组,防护盾需要1个液压阀组,锚固需1个液压阀组,同步控制液压马达和液压油缸。
液压控制系统
液压控制系统主要包含泵站压力闭环控制,以及液压伺服闭环系统两部分:
泵站压力闭环控制系统主要是采用工业伺服电机以及伺服驱动器,通过读取泵站压力值,控制电机转速,完成闭环控制。
伺服驱动器可通过负载变化,自动调整参数,实现自适应控制。
液压闭环系统通过开关量控制液压阀组的通断,同时获取流量传感器的数值,该数值表示了此时打开的那组液压阀组相对应的液压缸的流量值,乘以液压阀组的导通时间,计算液压缸的位置,完成液压伺服闭环控制。
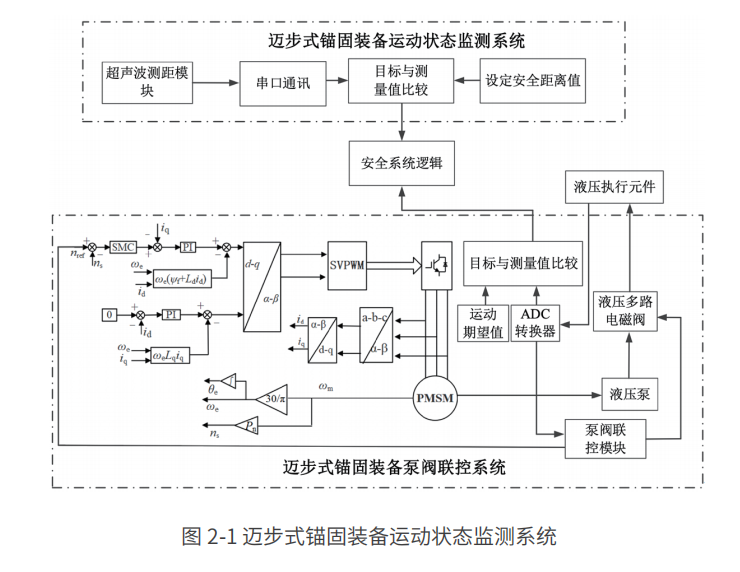
系统组成
为保证本装置的各子系统在作业和移动的过程中不发生碰撞,利用超声波测距系统,且将该信息反馈至动力系统控制单元中,构成闭环的安全连锁系统,从而避免该装备与其他装备、人员发生碰撞等事故的发生。
以上功能实现的原理框图如下图所示:
平台总控系统架构
电控软硬件平台
控制系统基于TMS320F28335 DSP 架构和 MATLAB/Simulink 开发。拥有 AD、DA、IO、Encoder、PWM、CAN、SPI 等丰富的硬件外设接口,以及一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是用于进行基于模型设计(MBD:Model-Based Design)控制系统开发的教学和科研产品。控制系统如图2所示,是可对标国际先进的控制与半实物仿真领域的产品。

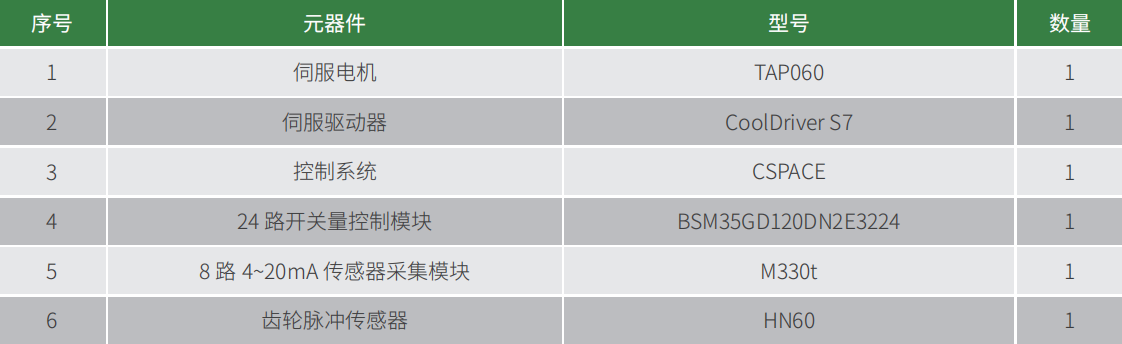
主要参数

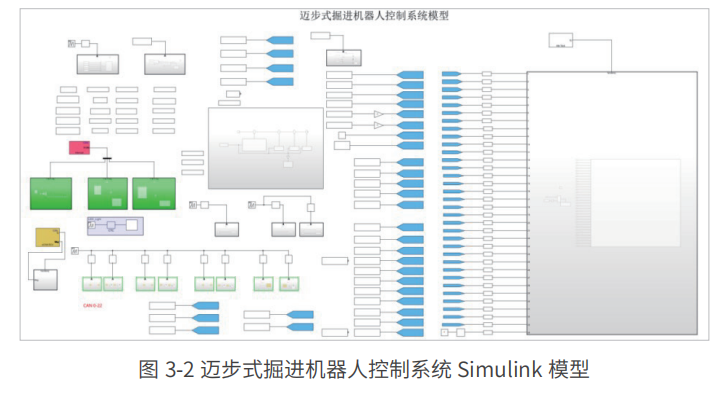
软件平台采用 Windows 操作系统上面安装的 MATLAB/Simulink(2020b 版本)软件进行编程开发,采用 MBD 的方式进
行液压平台电控方案开发,Simulink 中开发的控制程序如下图所示:
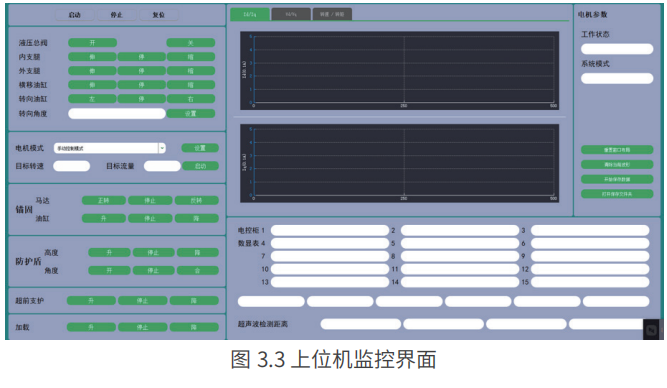
监控软件
开发一整套的上位机监控软件,能够对机各子系统进行监测与控制,且能够提供任务设定的界面,便于控制,监控软件如下图所示:
实验内容
提供的实验:
(1)液压伺服基础实验:包括柱塞泵、液压马达、分流阀、比例阀、油箱、压力传感器、流量传感器等的认知、应用;
(2)液压缸同步控制实验;
(3)迈步式行走实验;
(4)转向实验;
(5)PID 算法实现电机电流速度双闭环控制实验;
(6)基于 CSPACE 的电机自适应控制实验;
支撑的教学科研

- 上一篇:开源两关节助行机器人(髋部)
- 下一篇:开源四足机器人


