

类人形机器人教学科研平台
发布日期:2023-09-18 浏览次数:4732
产品概述
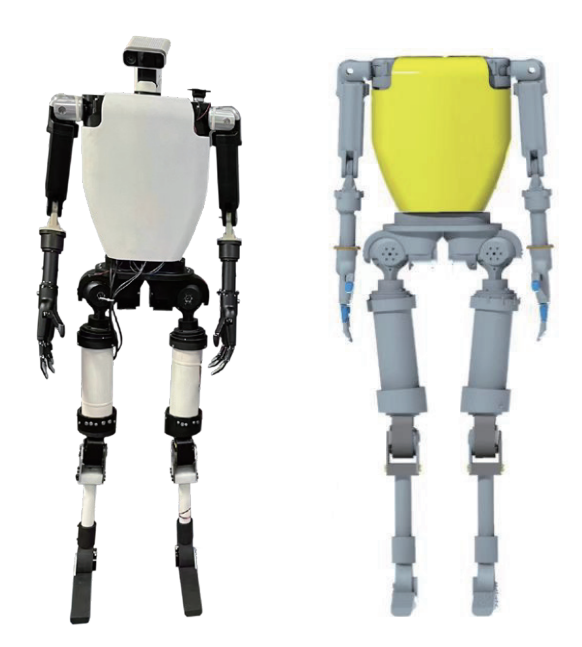
类人形机器人系统是由上肢(五自由度机械手臂)、下肢(五自由度机械腿)、腰部(三自由度)棉手(六自由度)、控制系统、传感器、上位机和电源组成。每个旋转关节由高精度减速机、伺服电机、高精度编码器和伺服驱动器组成。人形机器人系统使用全自主研发的运动学和动力学控制算法和软硬件控制系统,都可开源,提供丰富的运动学、动力学控制、步态控制实验以及伺服电机控制实验案例,如正逆运动学实验、上肢关节空间和笛卡尔空间轨迹算法实验、下肢腿部步
态规划、运动控制实验、棉手抓取实验、类人形机器人协调运动实验、类人形机器人抓取搬运实验等。可选配视觉传感器、激光雷达,支持增加视觉检测和目标识别、导航、避障等功能的研究。
该系统既可以作为自动化、机器人、机械电子、智能制造、机械工程等专业中的《机器人学导论》、《计算机控制技术》、《电机驱动与伺服控制》、《运动控制》、《机电一体化技术》、《机器人操作系统》 等课程的配套实验实践平台,也同时支撑机器人与人工智能的科研。
产品特点
(1)类人形机器人产品为实验载体,支撑机器人建模仿真、电机驱动和运动控制、机器人运动学及控制、机器人动力学及控制、步态控制、平衡控制等教学实验,以及科研领域的算法验证实验和视觉、导航、避障综合应用等高级应用的控制实验等。
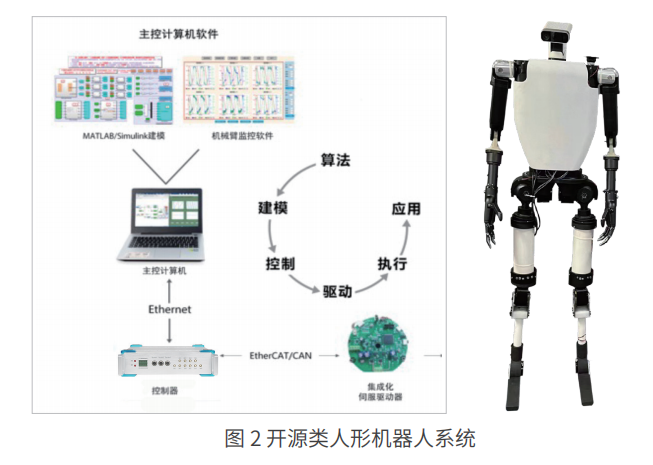
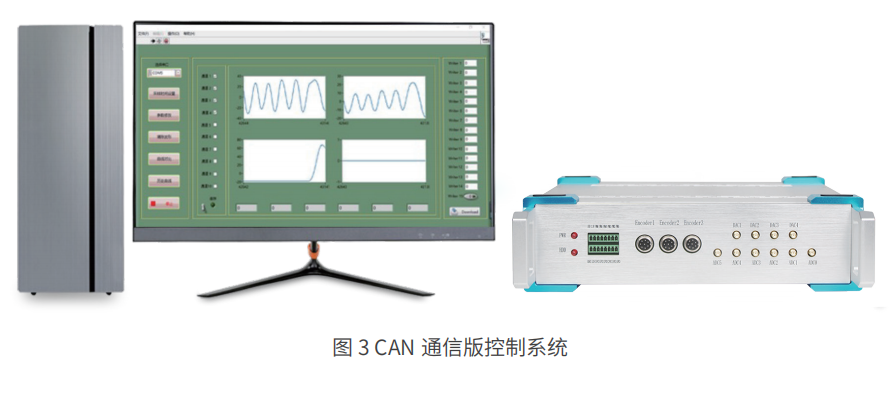
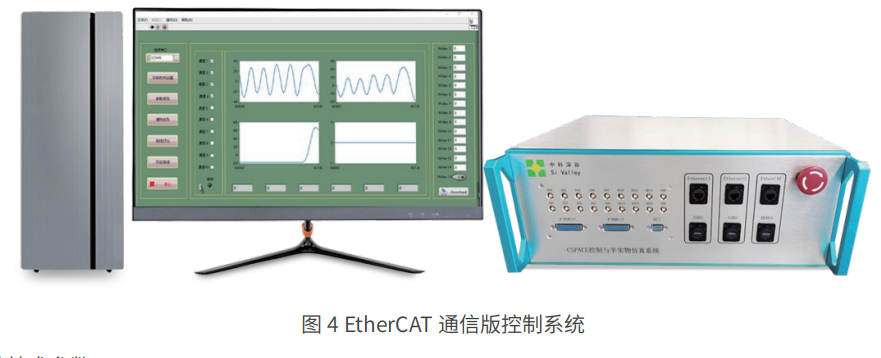
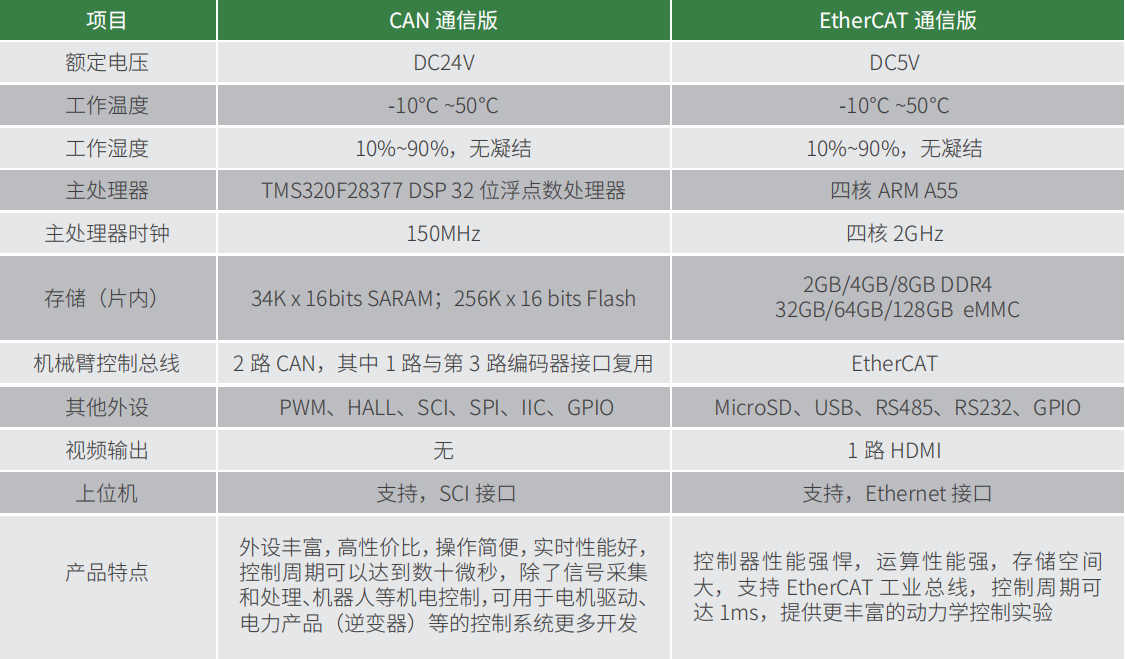
(2)控制器有 TI DSP、ARM、x86 工控机可选,提供 CAN(可升级为 EtherCAT)总线、RS232、RS485 通讯控制接口,控制周期可以小到 1ms,均采用 Matlab/Simulink 软件进行编程,支持基于模型设计的开发方法进行开发,可以更好更快地研究高级自动控制算法。
(3)提供丰富的机器人运动学、动力学、步态控制和平衡控制案例,方便地掌握人形机器人控制系统的技术,进行更深入的研究。
(4)可支持进行参数辨识、柔顺控制、拖动示教、碰撞保护等高级动力学算法和机器人关键技术的开发。
平台硬件组成及参数
类人形机器人系统主要系统如下所示,分为控制系统和执行系统两部分。
类人型机器人本体
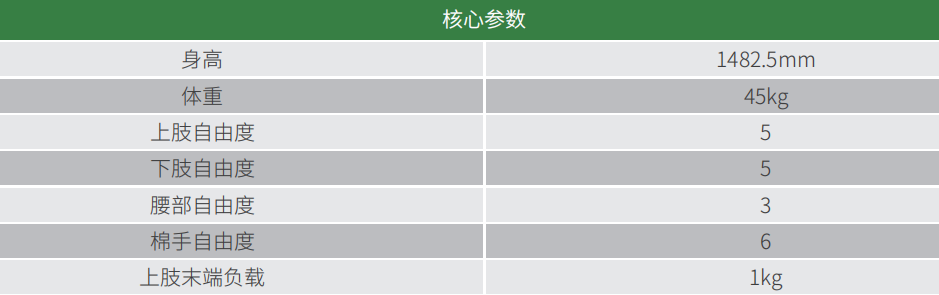
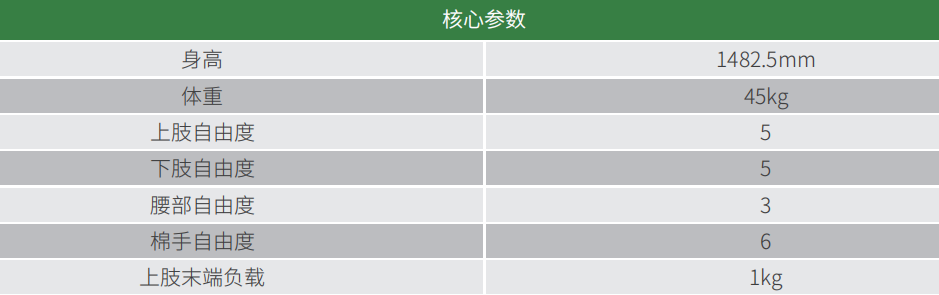
类人形机器人本体技术参数如表 2 所示,本体为高 1482.5mm,体重 45kg,手部末端额定负载 1Kg,结构紧凑,易于安装。机械臂关节模组采用智能集成化设计,将精密减速机、伺服电机、高精度编码器、驱动器等集成一体,每个机器人关节通过 RS232 或 CAN 总线进行通讯控制。
控制系统平台
控制系统基于 TMS320F28377 DSP 或双核 ARM Cortex-A55 架构和 MATLAB/Simulink 开发。拥有 AD、IO、Encoder、CAN 等丰富的硬件外设接口,以及一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是用于进行基于模型设计(MBD:Model-Based Design)控制系统开发的教学和科研产品。控制系统如图 5 和图 6 所示,控制系统参数如表 3 所示,是可对标国际先进的控制与半实物仿真领域的产品。
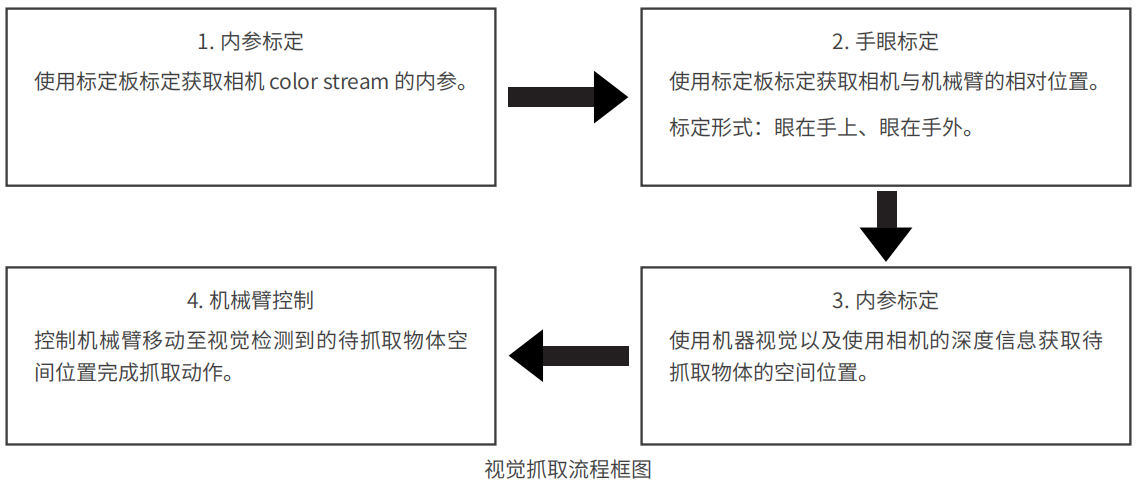
视觉系统
系统特点
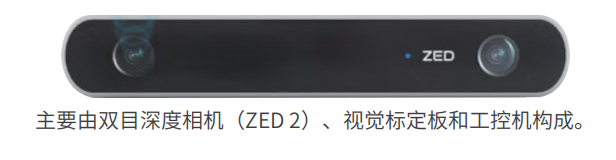
(1)采用国际先进的 ZED 双目深度相机,控制系统采用 ROS 通讯架构,通用灵活,易扩展,各子模块均提供 ROS 接口
(2)采用 Eye-in-hand 的安装方式
(3)控制系统可以快速进行手眼标定和控制
(4)提供开源的图像处理算法和应用案例
(5)在该平台的基础上,可以协助客户搭建开发各种场景的视觉抓取应用
(6)支持进行视觉导航的研究
(7)可搭载边缘计算处理设备,进行机器视觉和人工智能方面的研究
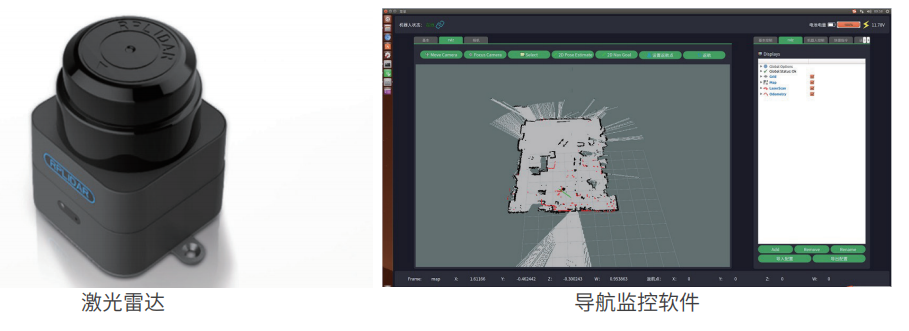
机器人平台可扩展激光雷达等传感器,进行地图建立、路径规划、导航方面的开发,主要由激光雷达和导航软件组成。
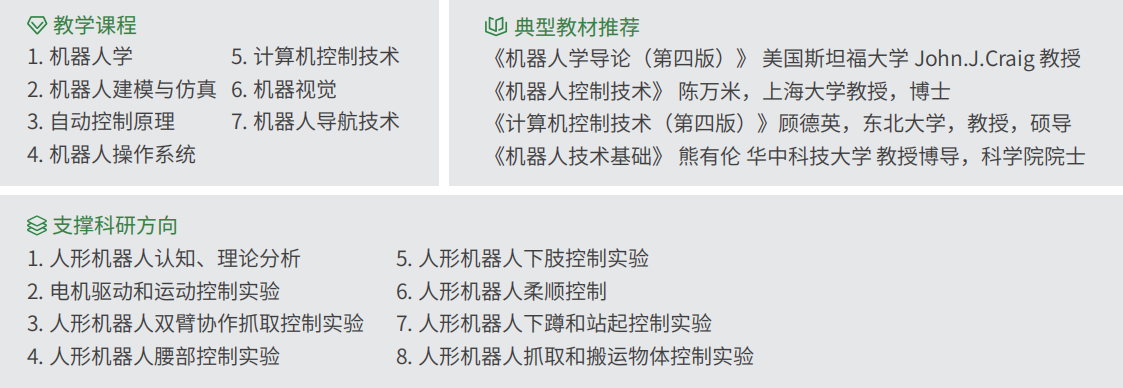
实验内容一览

支撑的教学科研
- 上一篇:开源按摩理疗机器人
- 下一篇:开源下肢外骨骼机器人系统


