

开源按摩理疗机器人
发布日期:2023-09-18 浏览次数:6028
产品概述
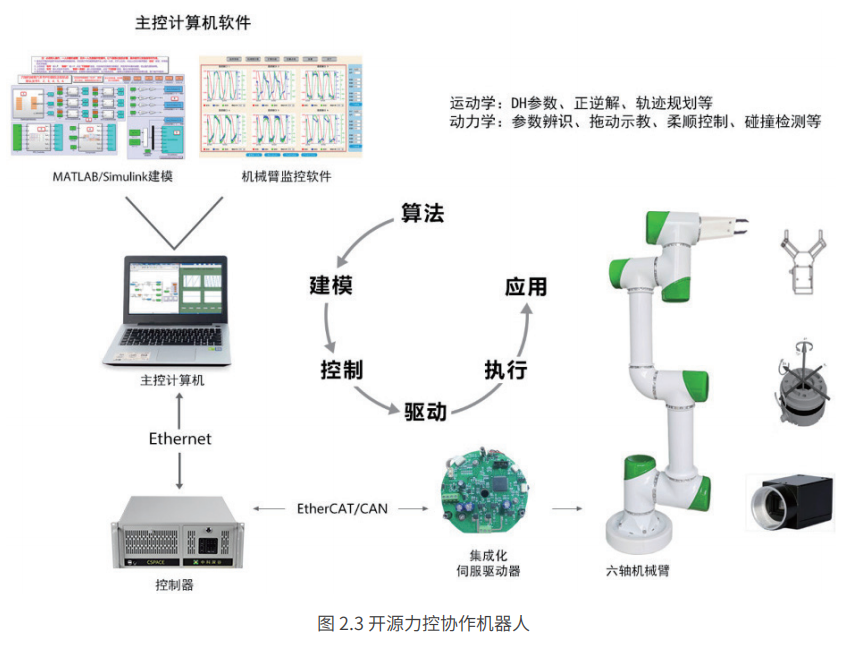
按摩理疗机器人是由理疗部件、开源六轴机械臂、六维力传感器、3D 视觉系统、控制系统、上位机和稳压电源等组成,能实现扫描人体部位,进行按摩理疗和康复治疗并能控制力度的功能。
该机器人系统使用全自主研发的运动控制系统,为教学和科研提供优越的开放性支撑。系统控制算法和代码开源,提供丰富的运动学、动力学控制实验以及伺服电机控制实验案例,如机械臂运动控制正逆解实验、笛卡尔空间轨迹规划实验、机
械臂关节零力拖动实验、机械臂关节自适应控制实验、碰撞保护实验、动力学参数辨识实验等。该系统既可以作为自动化、机器人、机械电子、智能制造等专业中《机器人学导论》、《机器人控制技术》、《计算机控制技术》、《电机与伺服控制》、《机器人机电一体化技术》等课程的配套实验平台,也可作为支撑相关领域的运动学、动力学及伺服驱动算法研究的科研平台。
产品特点
(1)开源成熟工业机械臂产品为实验载体,支撑机器人建模仿真、机器人运动学及控制、机器人动力学及控制等教学实验,以及科研领域的算法验证实验和打磨等高级应用的控制实验等。
(2)控制器提供 EtherCAT 或 CAN 总线通讯接口可供选型,控制周期可以到 1ms。采用 Matlab/Simulink 软件进行编程,可以更好更快地研究高级自动控制算法。
(3)单关节模组伺服驱动器自主开发,性能优异,开放电流、速度、位置三环控制,支撑高级动力学算法研究。
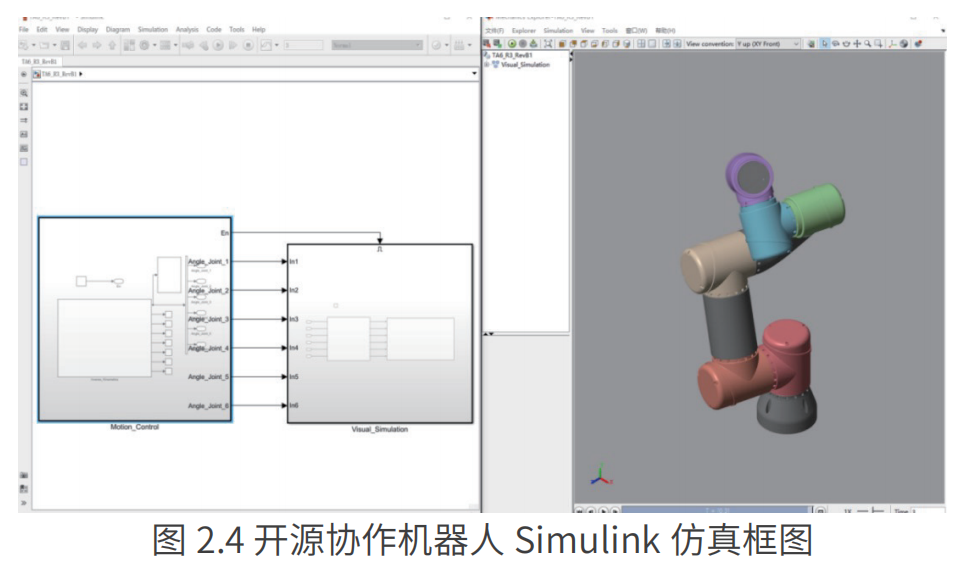
(4)提供丰富的机械臂运动学、动力学控制案例,提供 Simulink 的软件仿真程序和实验,方便地掌握机械臂控制系统的技术,进行更深入的研究。
(5)可进行参数辨识、柔顺控制、拖动示教、碰撞保护等高级动力学算法和机器人关键技术的开发。二、 平台硬件组成及参数机器人主要硬件如下图所示。

按摩理疗部件
按摩理疗部件由针式按摩头、电机、传动机构、电热丝等组成,具有振动、加热、微电流等功能,可用于人体众多部位的按摩理疗。

六轴机械臂 Simulink 软件仿真图

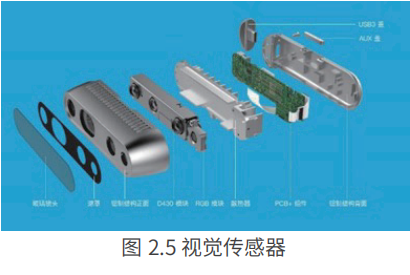
3D 视觉系统
由英特尔的 RealSense D435 深度相机、视觉标定板等构成,标定好后,用于识别待按摩和理疗的部位,并把位置信息反
馈给机械臂。

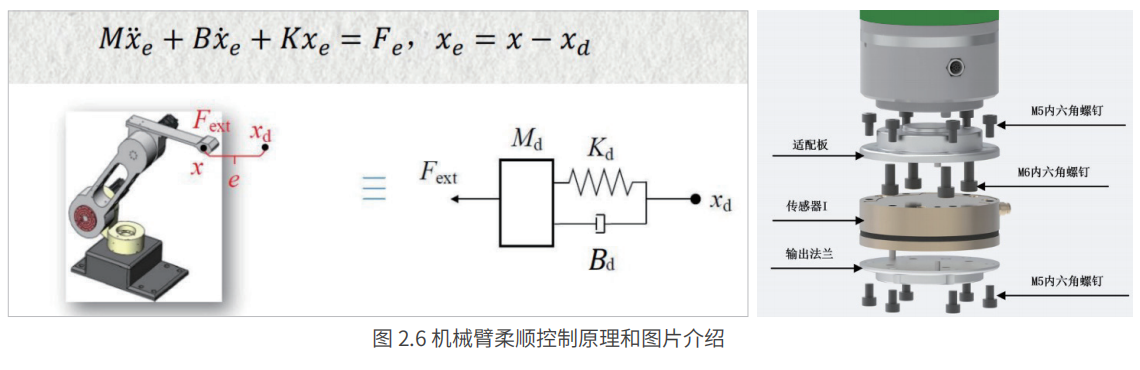
力传感器
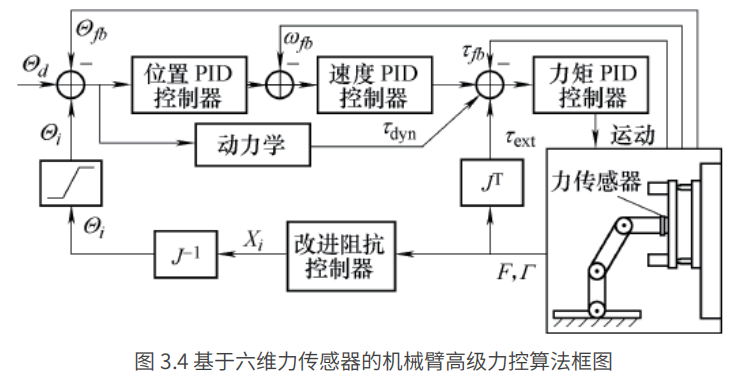
结合按摩理疗和康复治疗的需求,安装对应的力传感器,让机器人末端执行器在笛卡尔空间内的每个方向上都体现弹簧-阻尼-质量组成的二阶系统的动态特性,实现机械臂的柔顺控制,原理和图片如下所示:
开源控制系统
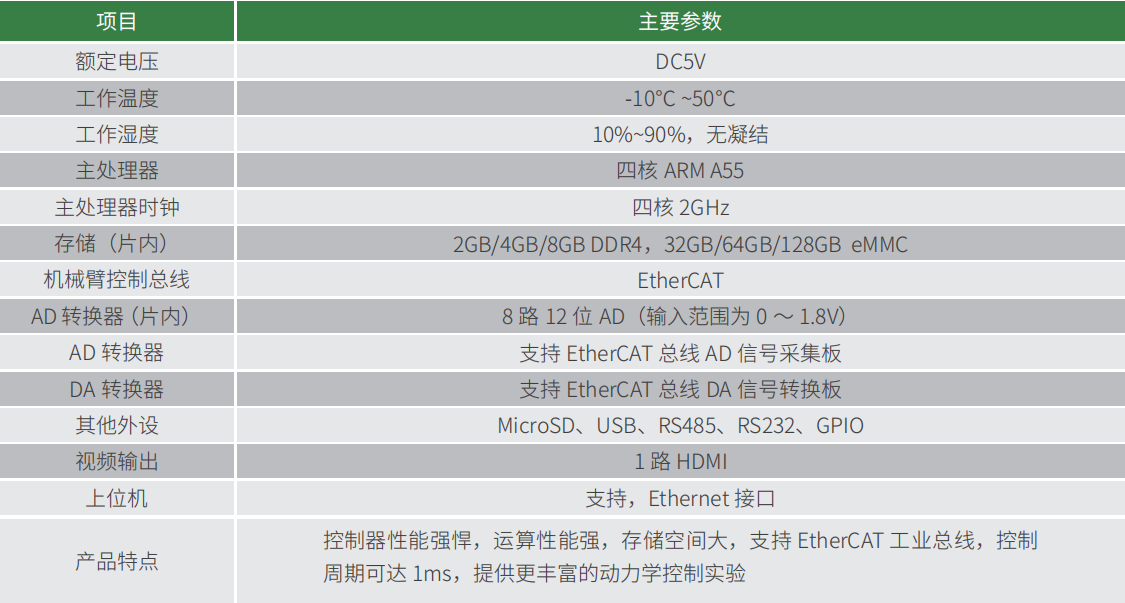
控制系统基于四核 ARM Cortex-A55 架构的 RK3568 处理器和 MATLAB/Simulink 开发。拥有 AD、IO、CAN、EtherCAT、Ethernet 等丰富的硬件外设接口,以及一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是用于进行基于模型设计(MBD:Model-Based Design)控制系统开发的教学和科研产品。控制系统如下图所示,控制系统参数如表3所示,是可对标国际先进的控制与半实物仿真领域的产品。
平台软件组成
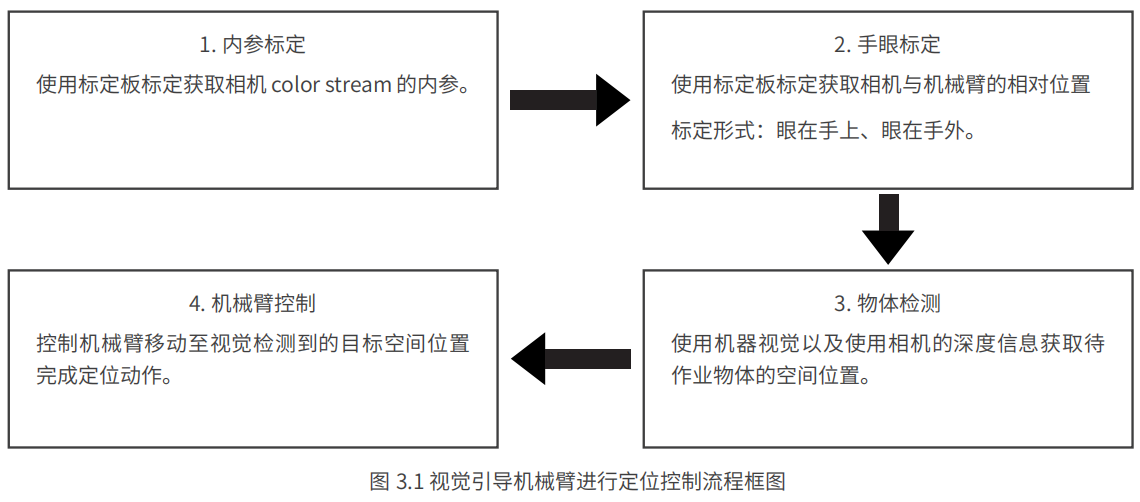
视觉识别软件
深度相机安装在机械臂的末端,识别按摩理疗和康复治疗部位,获得目标轨迹信息:
系统特点
(1)控制系统采用 ROS 通讯架构,通用灵活,易扩展,各子模块均提供 ROS 接口
(2)可以灵活调整相机的安装方式,满足 Eye-to-hand 和 Eye-in-hand 的使用需求
(3)控制系统可以快速匹配不同的相机安装方式进行手眼标定和控制
(4)使用 OpenCV 进行开发,提供开源的图像处理算法和应用案例
(5)在该平台的基础上,可以协助客户搭建开发各种场景的视觉抓取应用
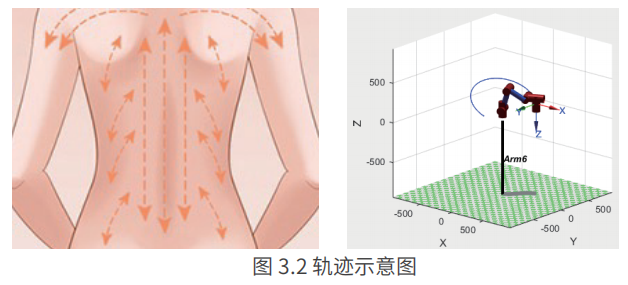
轨迹生成软件
3D 视觉识别出待按摩理疗和康复治疗的部位,结合事先存储的数据库,计算轨迹,然后把轨迹发给机械臂控制器,执行对应的轨迹运动:
在机械臂的笛卡尔空间轨迹规划中,中间点即插补点的坐标可以通过插补算法得到。得到中间点后,在把中间点的位姿转换成相应的关节角,再通过对关节角的控制,使得机械臂的末端能按照预先规划的路径运动。机械臂的笛卡尔空间轨迹规划位姿控制过程大致如下所示:

高级动力学控制
机器人有一个基本的规划运动,力传感器获得机器人对接结构间的作用力,根据力控策略,可以通过机器人动力学获得叠加后运动所对应的各关节力矩,直接在关节力矩环加以前馈,使关节产生期望的力矩,带动机械臂运动,并检测末端力、关节位置、速度、力矩信号,反馈给相应的控制单元,从而完成完整的柔顺控制过程。
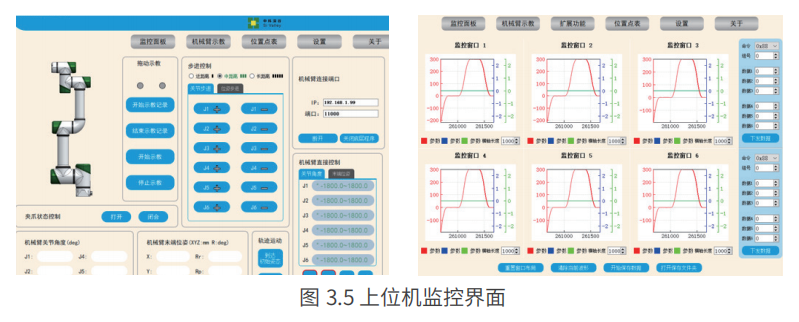
监控软件
提供一整套的上位机总控软件,能够对机械臂等进行监测与控制,能实现 18 通道的参数采集和显示、控制参数实时在线修改,设定机械臂的运动轨迹等,进行自动化运动控制。
实验内容一览

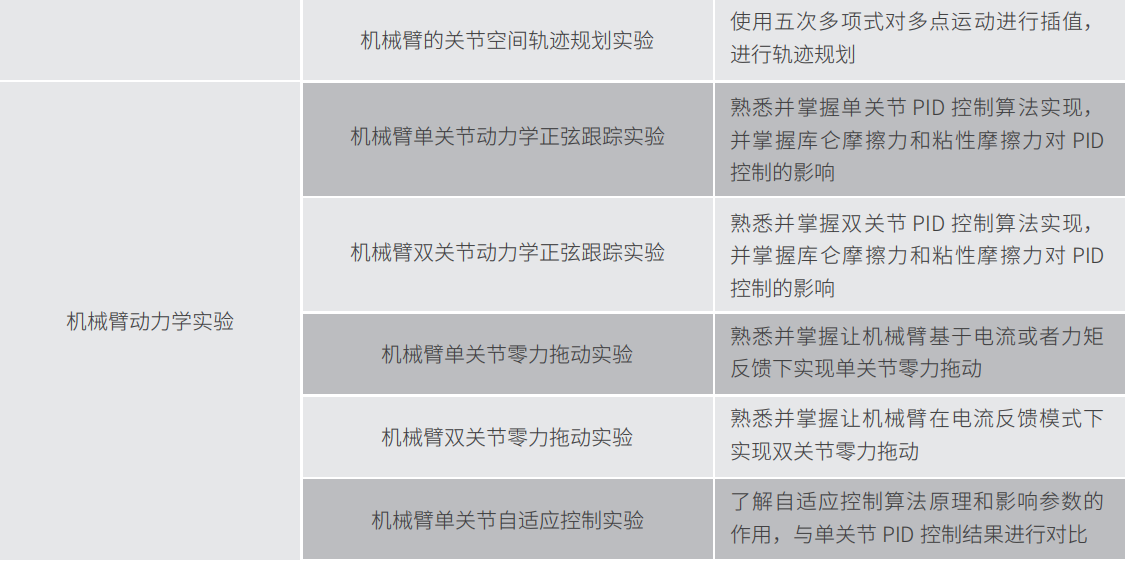
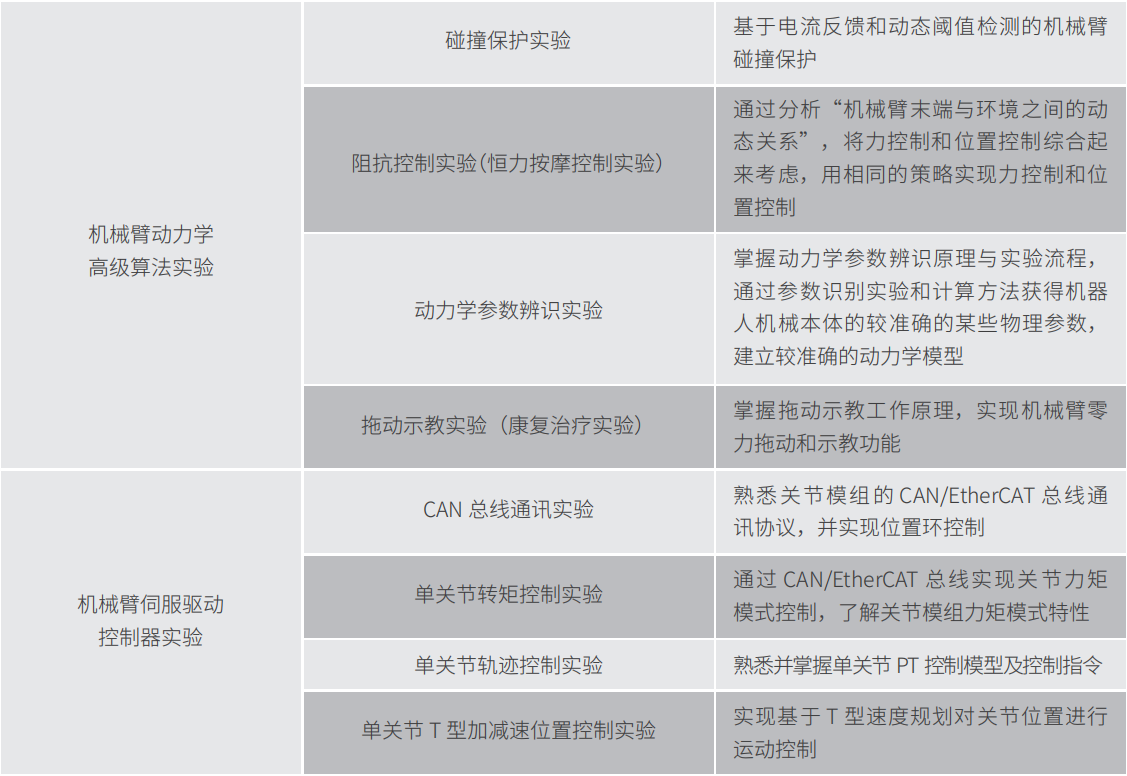
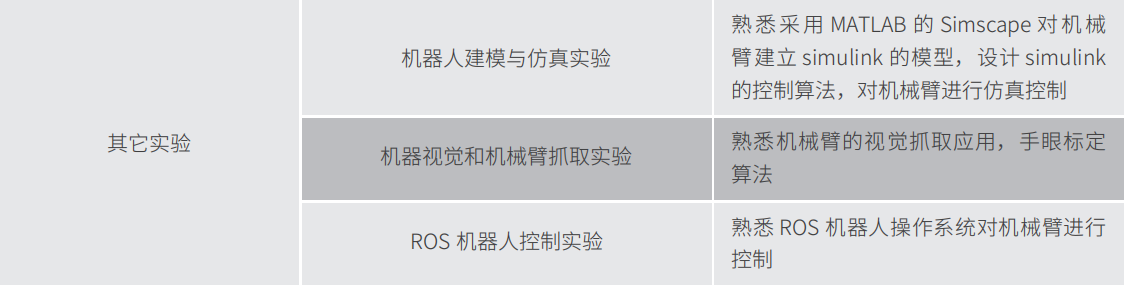
支撑的教学科研

- 上一篇:开源六轴协作机器人打磨工作站
- 下一篇:类人形机器人教学科研平台


