

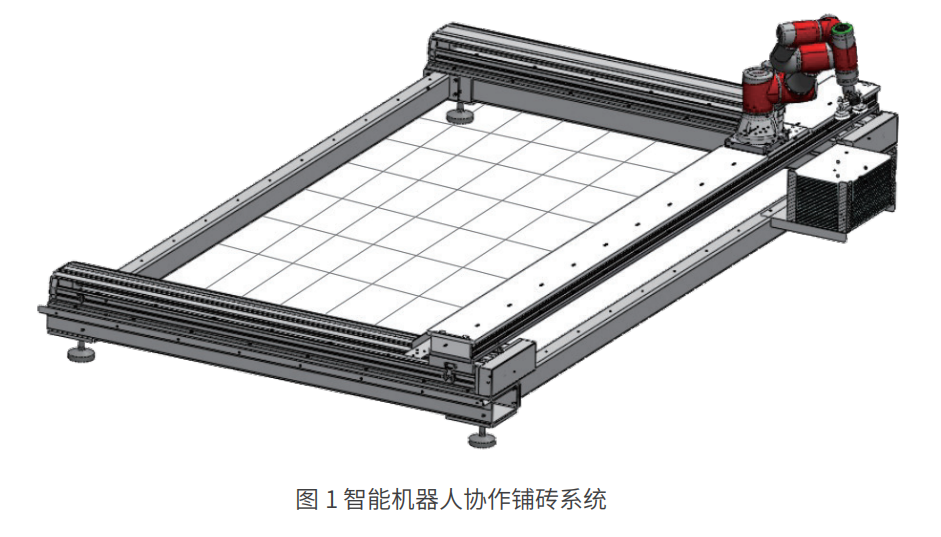
智能机器人协作铺砖系统
发布日期:2023-09-22 浏览次数:3566
产品概述
在智慧城市建设热潮与建筑施工产业革新浪潮双重作用下,为了更好的赋能智能机器人研究和产业化,从而推出自主研发的智能机器人协作铺砖系统。作为智能作业机器人的一种,建筑机器人是解决建筑行业低效率、高污染、高损耗的有效途径之一;平台充分利用智能化技术,提高建造过程中的智能化水平。
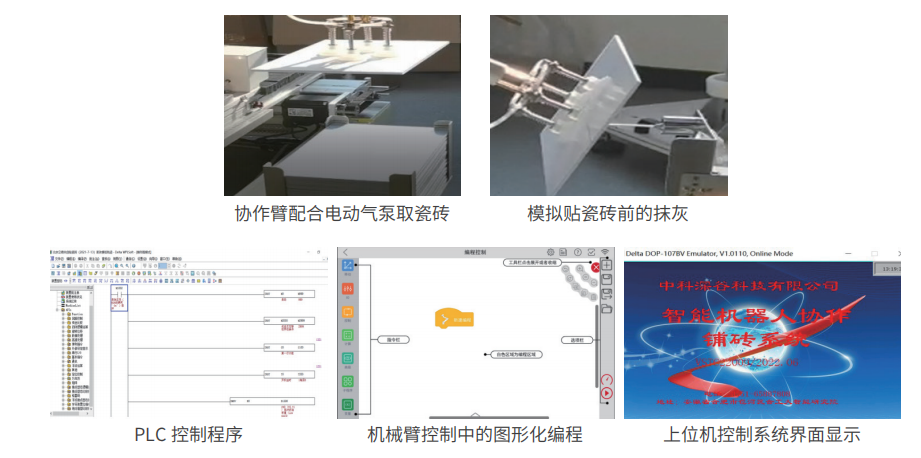
平台由六自由度协作臂控制系统、PLC 控制系统、铺砖工具、上位机组成。采用 XY 模组作为机器人的腿,协作机器人作为手,末端装有铺砖工具,由 PLC 控制模拟贴瓷砖流程。首先 PLC 控制 XY 模组到料仓区域取料;然后控制机器人进行抹灰工艺,按照贴瓷砖工艺,经过算法控制运送到到指定位置;最后控制机器人按照贴瓷砖工艺摆放瓷砖。系统不仅方便教学,还能为深层次的协作机械臂或相关的机器人科研提供研发平台。
产品特点
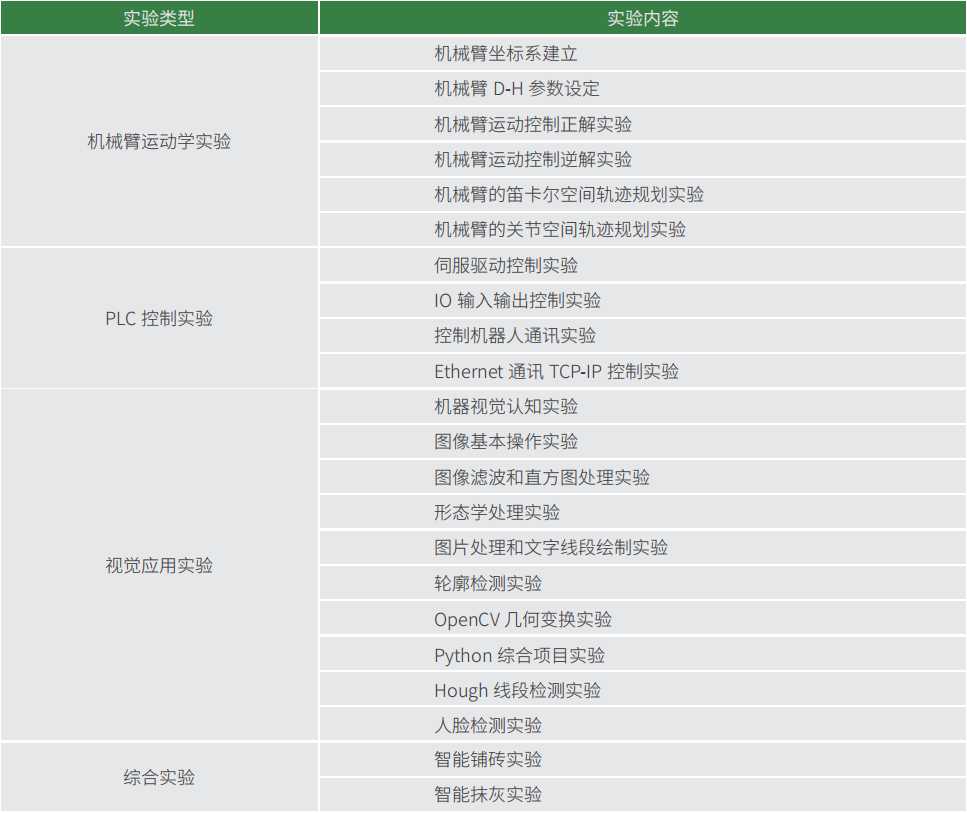
(1)支撑机器人建模仿真、机器人动力学及控制等教学实验,以及科研领域的算法验证实验和打磨等高级应用的控制实验等;
(2)系统控制器采用工业式的设计标准,用上位机操作,以工业 PLC 为主控,配合工业协作机械臂实现多场景和领域的控制实验。该系统控制器具有防护等级高,系统应用安全稳定,易于学习和使用,可支撑老师、学生在平台上做各类科研项目和教学实验;
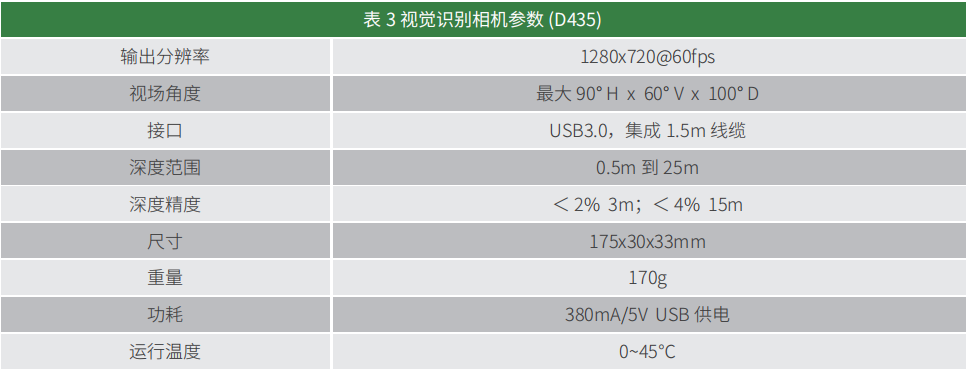
(3)开源视觉系统:开源视觉系统使用 Intel RealSense D435 或 D435i 深度相机。该相机提供了多种语言版本的 SDK,算法上可使用开源的 OpenCV 库进行开发,能够满足该项目的教科研需求;开源视觉系统使用 Intel RealSense D435 或 D435i深度相机。该相机提供了多种语言版本的 SDK,算法上可使用开源的 OpenCV 库进行开发,能够满足该项目的教科研需求;
(4)完善的系统开放性及定制能力,丰富的软硬件接口,支持 CAN、Ethernet 等多种通讯方式采用研究人员自主的控制系统进行控制,也可以用系统自带的 Simulink 和 ROS 进行系统的开发;
(5)提供丰富的应用场景:图形编程操作,智能示教,柔顺拖动等。
实验平台
设备清单
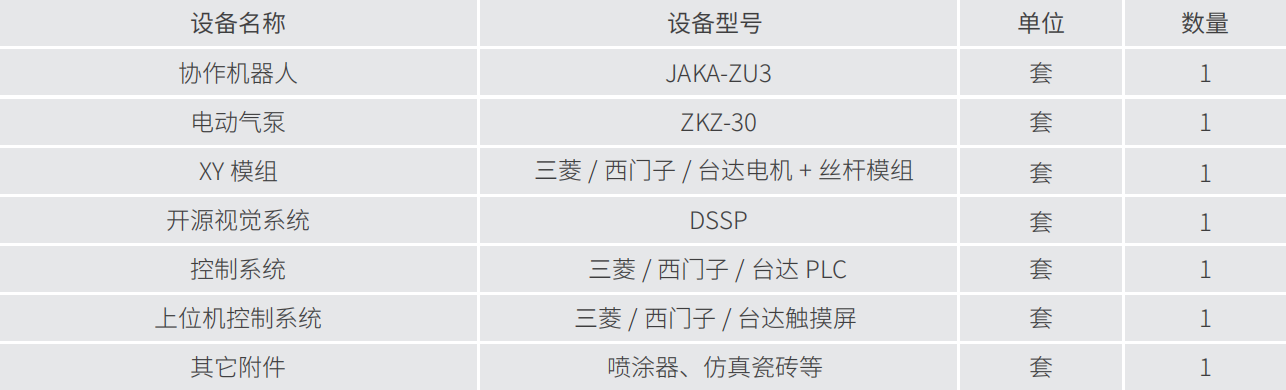
机械臂本体
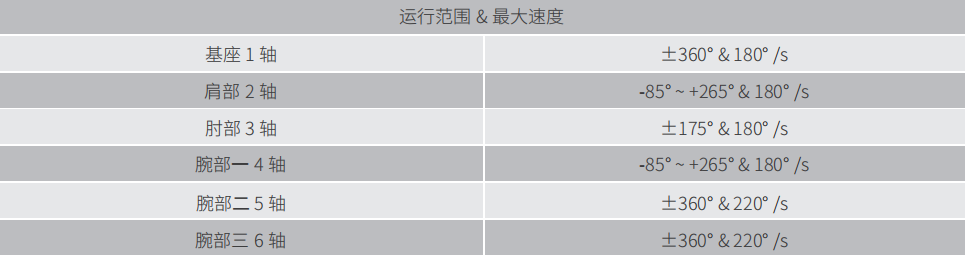
工业协作机械臂本体技术参数如下图所示,本体为六自由度,额定负载 3Kg,最大工作半径 626mm,本体自重 12Kg,结构紧凑,易于安装。编程采用图形化编程,拖拽编程,编程具有高效,易懂,容易使用等特点。机械臂具有碰撞保护功能,工作安全适合人机协同的场合。机械臂关节模组采用智能集成化设计,将谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器、驱动器等集成一体,每个机器人关节通过 CAN 总线组网。
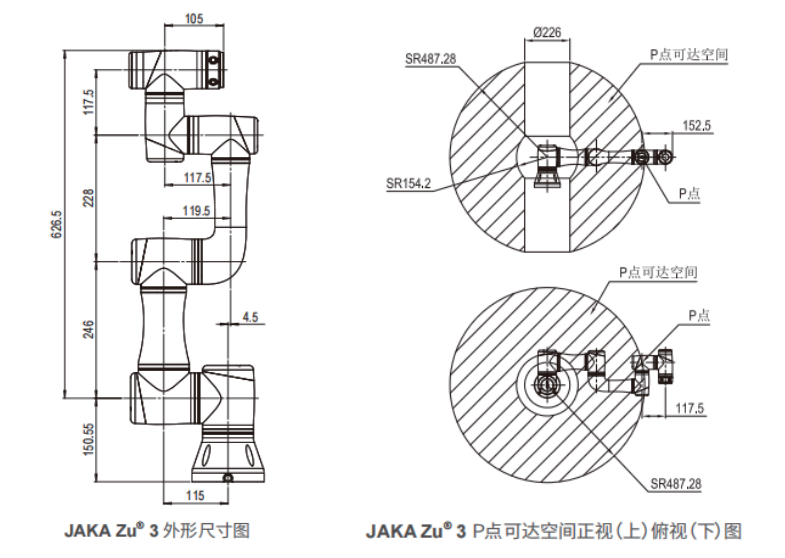
表2 单臂参数

系统控制器
系统控制器以工业PLC为主控,配合上位机触摸屏做为控制接口,采用工业式的设计标准,防护等级高,系统应用安全稳定,可支撑老师及学生科研项目及开始PLC课程等。
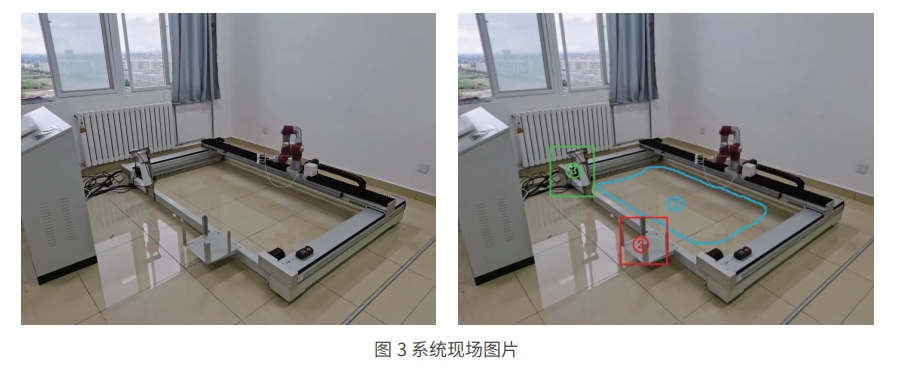
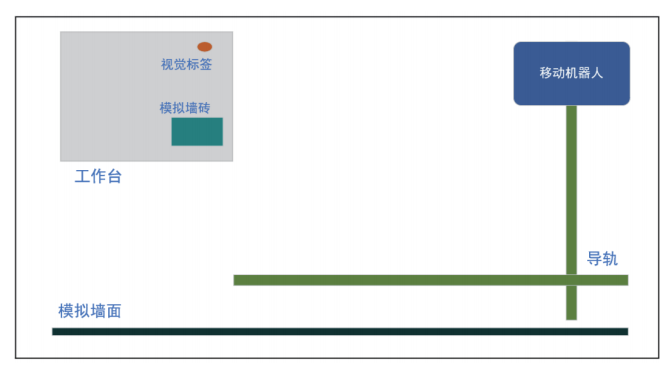
注释:①瓷砖铺设区②瓷砖物料区③瓷砖抹灰区
开源视觉系统
开源视觉系统使用因特尔 RealSense D435 深度相机。D435x 相机提供了多种语言版本的 SDK,算法上可使用开源的OpenCV 库进行开发,能够满足该项目的教科研需求。
应用案例
实验内容一览
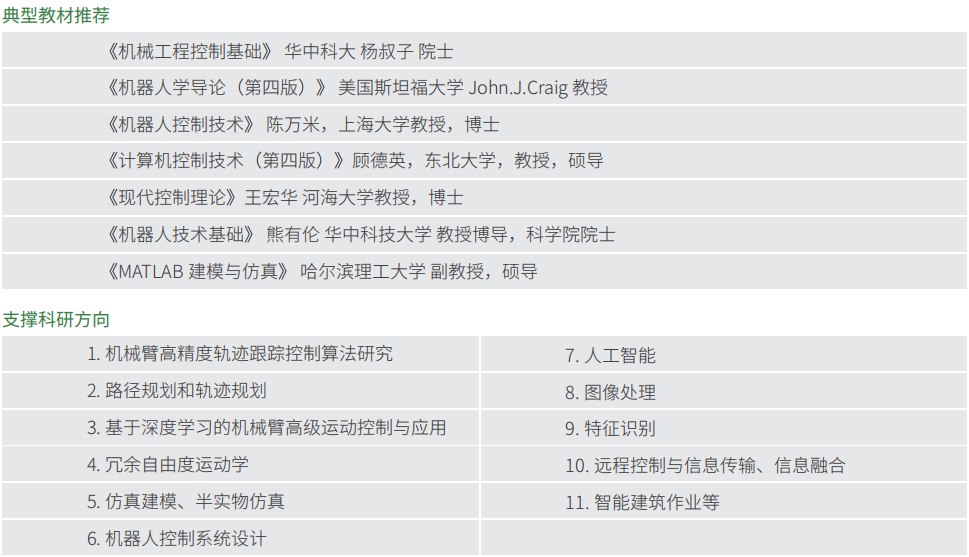
支撑的教学科研
- 上一篇:开源刚柔耦合绳索臂式机器人
- 下一篇:开源自动扎钢筋平台


