

开源刚柔耦合绳索臂式机器人
发布日期:2023-09-22 浏览次数:3707
产品概述
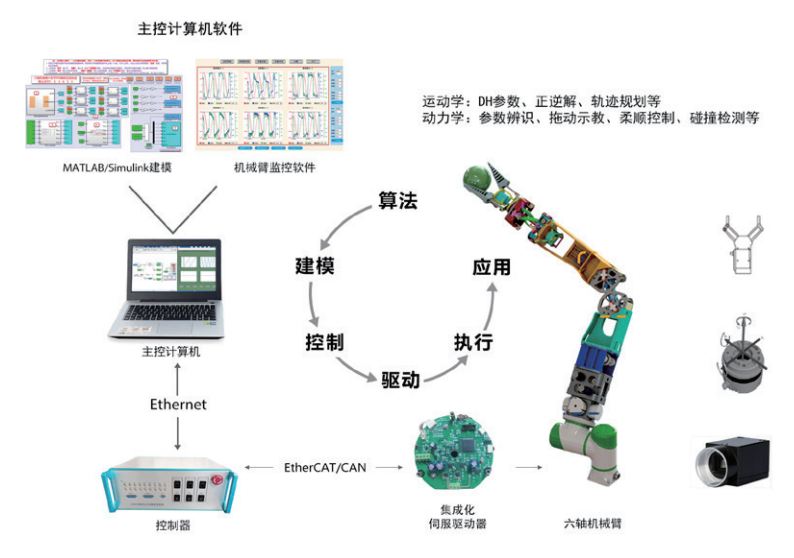
刚柔耦合绳索臂式机器人主要由计算机、机器人本体、CSPACE 控制与半实物仿真系统、深度相机(RealSense D435)构成,能实现从 Matlab/Simulink 仿真模型到嵌入式控制原型的自动转换,控制器通过 CAN 总线高效稳定控制各个伺服关节,并且可以通过在线调参来测试机器人运动控制性能。抓取功能方面,通过在机械臂末端搭载柔性夹爪和深度学习视觉平台,实现目标物体的识别、引导机械臂进行定位和抓取。
该机器人系统使用全自主研发的运动控制系统,为教学和科研提供优越的开放性支撑。系统控制算法和代码开源,提供丰富的运动学控制实验案例,如机械臂运动控制正逆解实验、机械臂的笛卡尔空间轨迹规划实验等。该系统既可以作为自动化、机器人、机械电子、智能制造等专业中《机器人学导论》、《机器人控制技术》、《计算机控制技术》、《伺服电机及控制》等课程的配套实验平台,也可作为支撑柔性机器人、特种机器人、机器人高级运动学算法研究的科研平台。
平台硬件
线驱动仿生机械臂介绍
机械臂本体
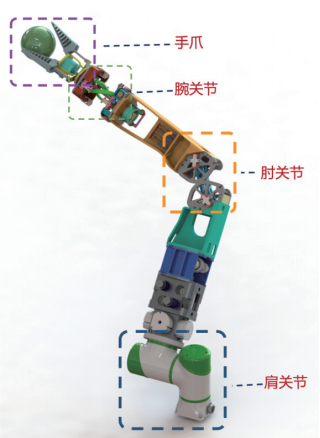
如图 1 所示,机械臂由肩、肘、腕三个关节组成。其中肩关节为机器人关节模组,有两个旋转自由度;肘关节采用一种滑轮组形式的传动机构,有 1 个旋转自由度;腕关节采用一种线驱动的四元数关节,有 3 个旋转自由度。设计的特点在于将线驱动机械臂结构与机器人关节模组相结合,形成一种新的仿人机械臂形式。本设计吸收了线驱动机械臂低摩擦、低惯量的优点,降低了机构的复杂程度和重量,同时,肩部的两个关节模组也可替换为三自由度关节模组,与四自由度线驱动机械臂结合,组成七自由度冗余机械臂。
机械臂材料
为实现良好的人 - 机器人交互性能,选择光敏树脂、尼龙、A5052 铝镁合金、304 不锈钢以及铝合金等作为机械臂各部分的加工材料,通过 3D 打印与机械加工技术完成零部件的制造,线驱动仿生机械臂具有轻量化的特点,具有较好的强度、刚度、密度、成本、稳定性。
机械臂整体结构尺寸
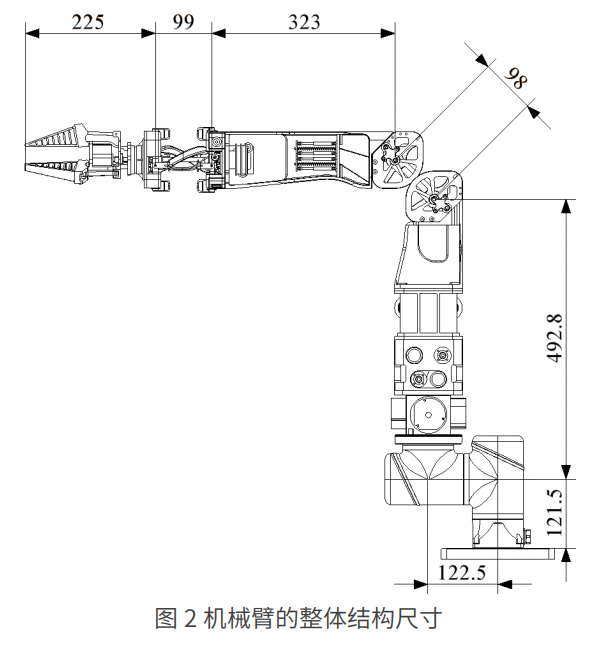
线驱动仿生机械臂的整体结构尺寸如图 2 所示。其中,夹爪的长度为 225 mm,腕关节的长度为 99 mm,小臂的长度为323 mm,肘关节的连接杆长度为 98 mm,大臂的长度为 492.8 mm,肩关节第一轴与第二轴的偏置距离为 122.5 mm,基座顶端到肩关节第一轴的距离为 121.5 mm。
控制系统
控制系统基于 TMS320F28335 DSP 和 MATLAB/Simulink 开发。拥有 AD、IO、CAN、SCI、SPI 等丰富的硬件外设接口,以及一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是用于进行基于模型设计(MBD:Model-Based Design)控制系统开发的教学和科研产品。控制系统如图3所示,控制系统参数如表1所示,是可对标国际先进的控制与半实物仿真领域的产品。
控制系统技术参数

视觉系统
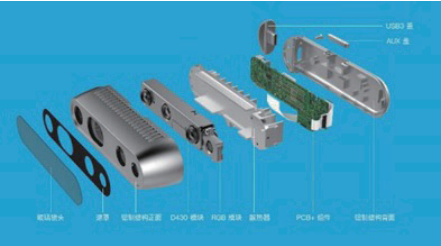
深度学习视觉平台主要有由英特尔的 RealSense D435 深度相机、视觉标定板等构成。标定好后可用于作业区域,并把位置信息反馈给机械臂的控制系统。RealSense D435 深度相机参数如下表所示。提供视觉全部源码,方便客户进行二次开发。

平台软件组成
视觉识别软件
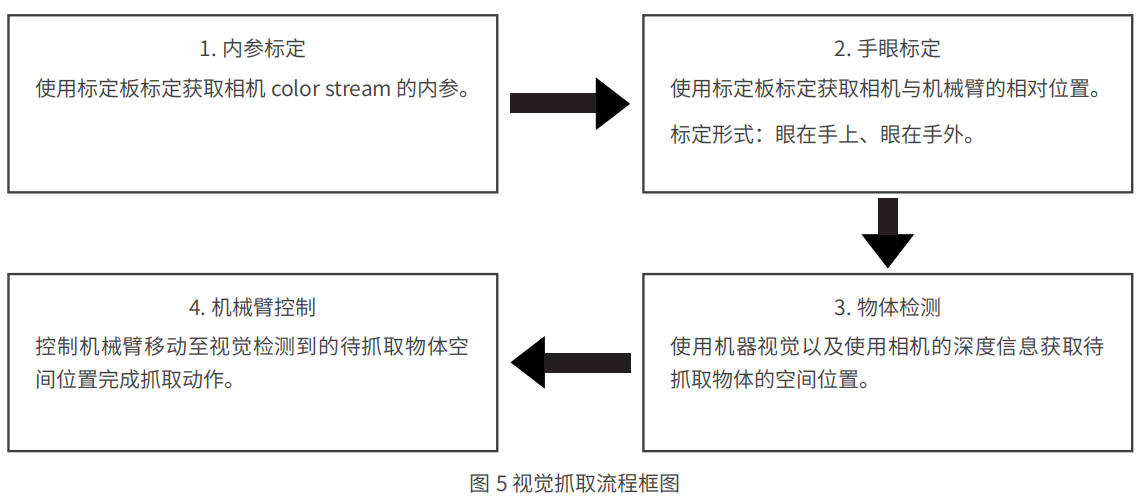
通过在机械臂上搭载柔性夹爪和深度学习视觉平台,实现目标物体的识别、定位,同时结合机械臂控制器,实现目标物体的抓取。
系统特点:
(1)控制系统采用 ROS 通讯架构,通用灵活,易扩展,各子模块均提供 ROS 接口
(2)可以灵活调整相机的安装方式,满足 Eye-to-hand 和 Eye-in-hand 的使用需求
(3)控制系统可以快速匹配不同的相机安装方式进行手眼标定和控制
(4)使用 OpenCV 进行开发,提供开源的图像处理算法和应用案例
(5)在该平台的基础上,可以协助客户搭建开发各种场景的视觉抓取应用。
轨迹规划软件
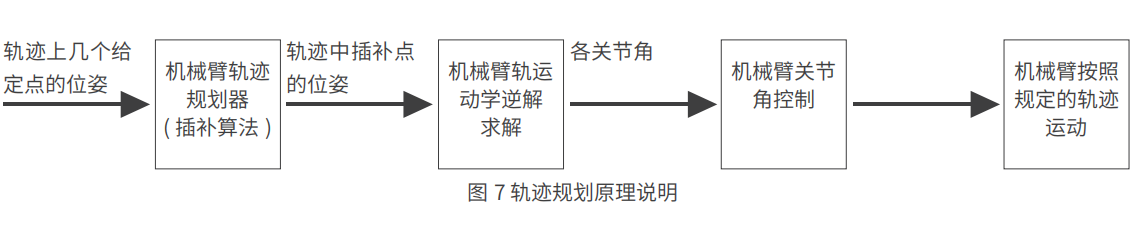
视觉系统识别出目标位置信息,结合事先存储的数据库,计算轨迹,然后把轨迹发给机械臂控制器,执行对应的轨迹运动。
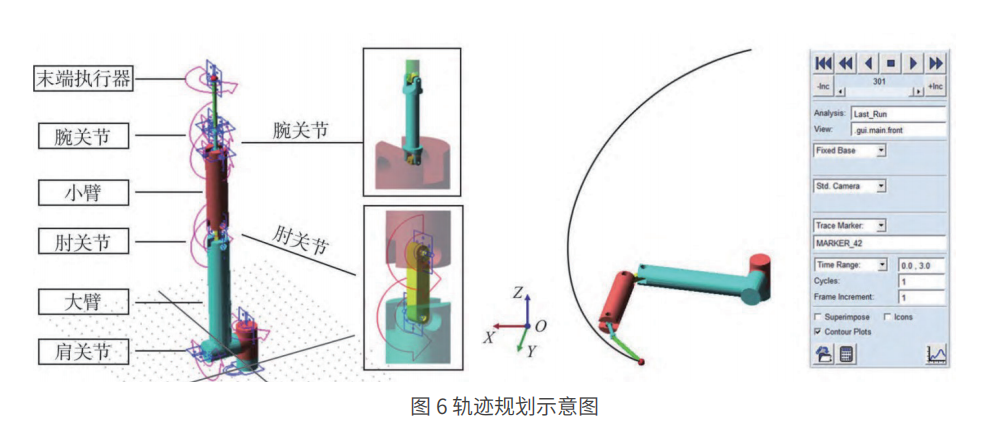
在机械臂的笛卡尔空间轨迹规划中,中间点即插补点的坐标可以通过插补算法得到。得到中间点后,在把中间点的位姿转换成相应的关节角,再通过对关节角的控制,使得机械臂的末端能按照预先规划的路径运动。机械臂的笛卡尔空间轨迹规划位姿控制过程大致如下所示:
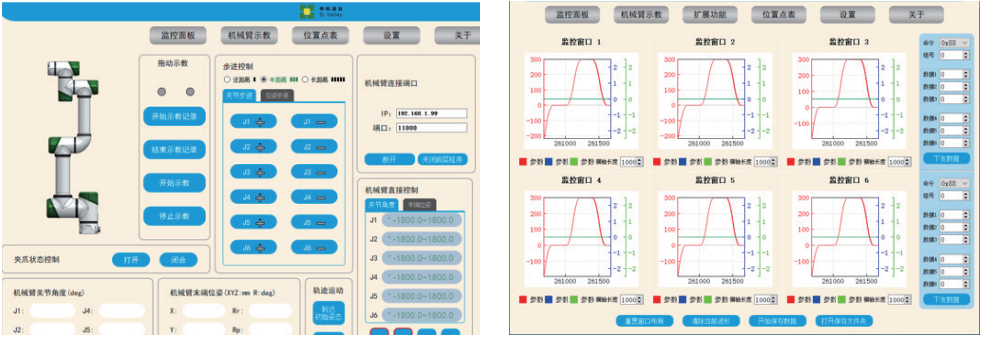
监控软件
提供一整套的上位机总控软件,能够对机械臂等进行监测与控制,能实现 18 通道的参数采集和显示、控制参数实时在线修改,设定机械臂的运动轨迹等,进行自动化运动控制。
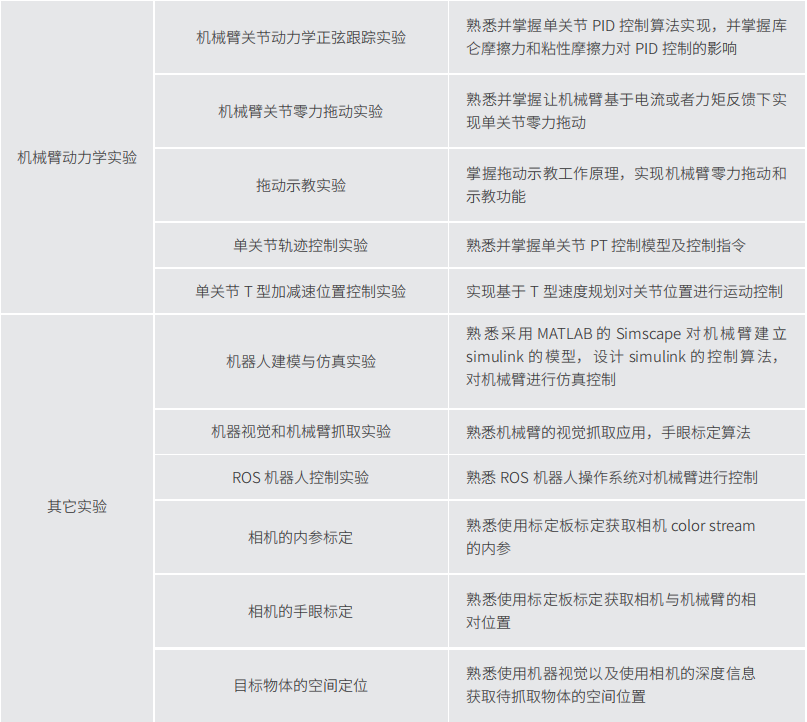
实验内容一览

支撑的教学科研

- 上一篇:无
- 下一篇:智能机器人协作铺砖系统


