

机器人技术与系统实验室方案|基于开源三轴及六轴协作机械臂系统
发布日期:2023-11-14 浏览次数:2736
PART 01 背景
机器人被誉为“制造业皇冠顶端的明珠”,其研发、制造和应用是衡量一个国家科技创新和高端制造业水平的重要标志。当前,机器人产业蓬勃发展,正极大改变着人类生产和生活方式,为经济社会发展注入强劲动能。
为了培养具备掌握机器人系统分析、设计、开发和应用技能的人才,高等学校机器人工程专业开设了《机器人学》、《机器人控制技术》等课程。此类课程理论性和实践性较高,具有较强的系统性和工程性。为了解决学生很难将理论与实践相结合,无法解决实际工程问题的问题,建设机器人技术与系统实验室,以培养满足产业发展需要的创新型人才。
PART 02 简介
该机器人系统实验室以开源三轴协作机械臂系统和开源六轴协作机械臂系统为载体,采取虚实结合、循序渐进的教学方式,开展系统原理及基础结构认知、机器人运动学、动力学及控制技术研究、机器人高级动力学算法开发等创新实践教学。在实践环节中,遵循从简单认知型实验到综合设计型实验的过渡,实现了实践教学从简单到复杂,从学生实验技巧的培养到学生设计创新能力提升的过渡。基于深谷学院线上平台,提供在线课程、在线实战案例讲解,提供机器人系统的运动学、动力学算法与相应的程序案例,为学生更好的掌握理解算法在实践中的应用。
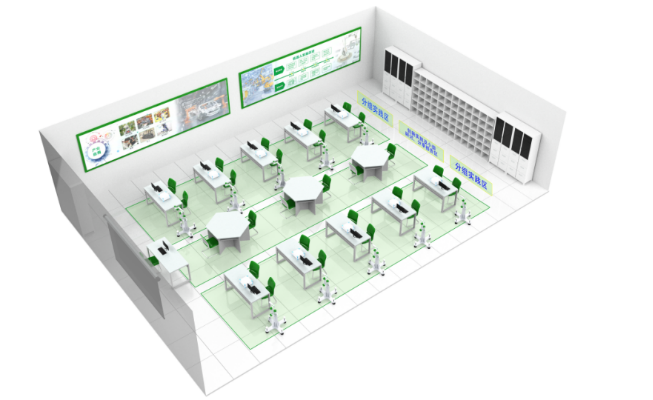
实验室建设效果图
PART 03 实验教学安排
(1)机器人学内容
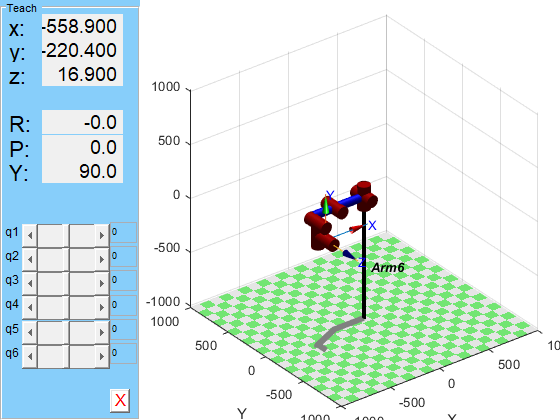
通过前期对机器人本体的结构认知了解后,可以着手对机器人系统的空间坐标系、姿态变换、运动学、动力学方程的表示与求解进行学习,深入研究机器人系统的运动及工作原理。
(2)机器人控制技术内容
通过关节空间和笛卡尔空间轨迹规划、单双关节PID动力学和自适应控制、零力拖动、参数辨识、柔顺控制、碰撞保护等控制算法的研究,可使机器人在各种不利因素的干扰下仍能维持系统处于稳定状态,保证控制精度与效果。
(3)创新实践内容
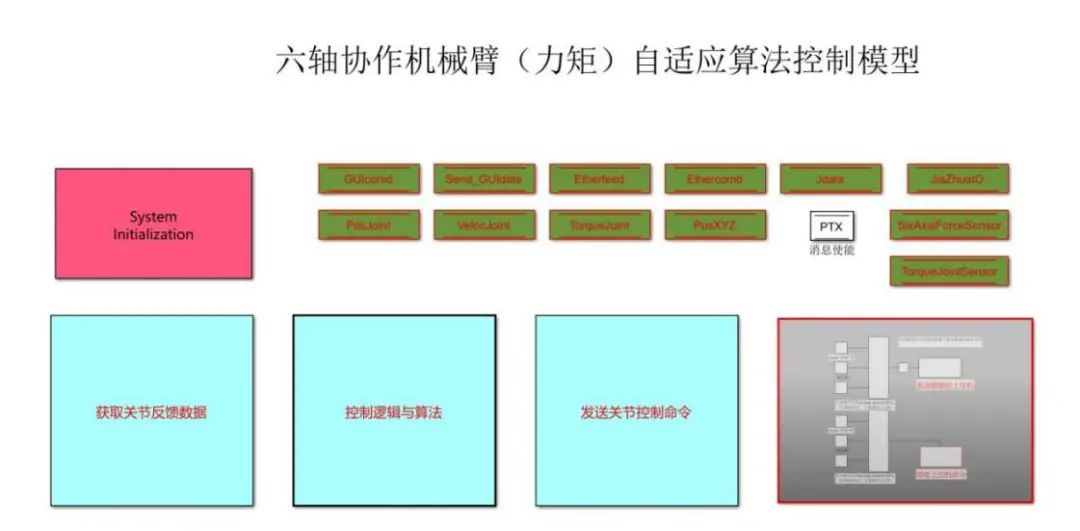
基于开源的驱动系统和平台,末端可以选配六维力传感器,结合实际的应用需求进行高级动力学算法研究与测试。也可以通过真实项目案例包,由学生自行进行创新性的开发,提升学生解决实际工程问题的能力。
PART 04 部分实验室案例




PART 05 科研论文
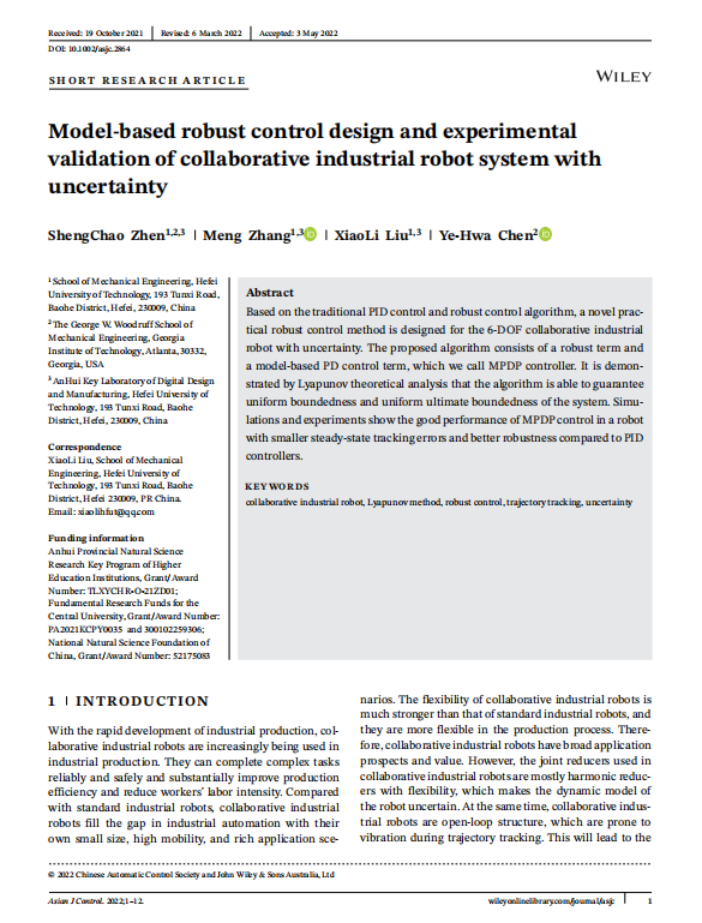
论文名称:Model-based robust control design and experimental validation of collaborative industrial robot system with uncertainty
期刊索引情况:SCI
影响因子:2.4
收录于:ASIAN JOURNAL OF CONTROL论文
内容简介
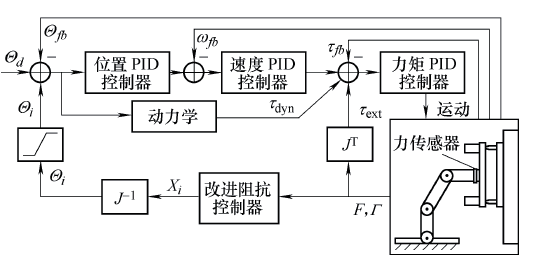
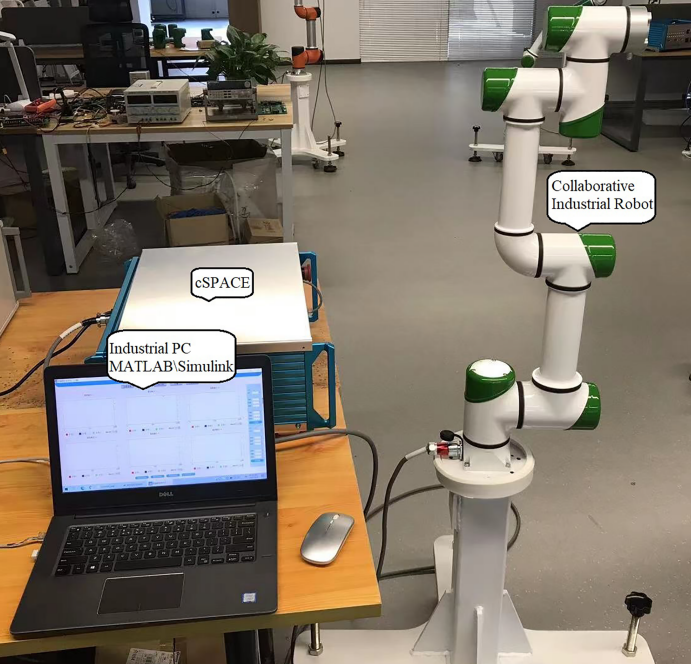
在传统 PID 控制和鲁棒控制算法的基础上,针对具有不确定性的 6-DOF 协作工业机器人设计了一种新型实用的鲁棒控制方法。所提出的算法由鲁棒控制项和基于模型的 PD 控制项组成,我们称之为 MPDP 控制器。通过 Lyapunov 理论分析表明,该算法能够保证系统的均匀有界性和均匀终极有界性。仿真和实验表明,与 PID 控制器相比,MPDP 控制器的稳态跟踪误差更小,鲁棒性更好,在机器人中具有良好的性能。
论文依托平台
CSPACE 控制平台内部采用的处理器是国产公司瑞芯微的RK3568处理器。RK3568紧随ARM架构的更新迭代,采用A55架构和G52图形处理器,让产品性能不断地提升,同时采用22nm的先进工艺,可有效提高能耗表现。支持LP4/LP4x/LP3/DDR4/DDR3,最高频率1600Mhz,最大容量支持8GB DDR3及DDR4支持2片选模式,最大容量支持8GB 支持DDR3及DDR4 ECC。
RK3568拥有丰富的功能拓展接口,可有效提高行业定制的拓展性。RK3568支持PCIE3.0 1×2/2x1Lanes,同时支持PCIE2.1 1x1Lane,满足4G/5G、wifi6、多网口、NPU等扩展需求。RK3568支持3x SATA3.0,解决传统AP处理器USB扩展SATA各种不稳定问题,最多支持4路USB口,1xUSB3.0/USB2.0 HOST + 1xUSB3.0/USB2.0 OTG + 1xUSB2.0 HOST + 1xUSB2.0 HOST。支持双千兆以太网口,并且支持QSGMII以减少IO口占用,满足工控及物联网网关等的多网口需求。能够实现代码自动生成、快速成型和嵌入式系统的开发功能。CSPACE系统能进行算法的快速实现,为研究人员的算法验证提供了很大的便利,也使得论文能够从理论出发,落脚于实验,大大增强了论文的可靠性。
PART 06 产品介绍
开源协作机器人是基于CSPACE控制系统和MATLAB/Simulink开发的教科研平台。其由机械臂本体(多个(3、6、7个)机械臂关节及其连杆和底座)、控制系统、上位机和稳压电源组成。每个机械臂关节由谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器和伺服驱动器组成。该机械臂系统使用全自主研发的关节驱动器及运动控制器,为教学和科研提供优越的开放性支撑。
该系统控制算法源代码开源,提供丰富的运动学、动力学控制实验以及伺服电机控制实验案例,如运动学实验、单双关节PID动力学算法实验、单关节自适应控制算法实验以及单双关节零力拖动实验等。

开源三轴协作机器人

开源六轴协作机器人
产品特点
1、工业级产品
开源成熟工业机械臂产品为实验载体,支持多种教学实验及科研领实验。
2、控制周期短
控制器采用CSPACE进行开发,控制周期≤1ms。
3、全自主开发
单关节模组伺服驱动器自主开发,性能优异。
4、开源开放
开放电流、速度、位置三环控制,支撑高级动力学算法研究,深度开源,提供丰富的机械臂运动学、动力学控制案例。
5、先进编程方法
采用Matlab/Simulink软件进行编程,更深入研究高级自动控制算法。
6、开发案例丰富
可进行参数辨识、柔顺控制、拖动示教、碰撞保护等高级动力学算法和机器人关键技术的开发。
7、实验案例丰富
可进行冗余自由度机器人方面高级运动学和动力学控制相关科研实验以及拉格朗日模型、PID、自适应控制、带摩擦力和重力补偿等动力学实验。


