

中科深谷自主开发的平面运动倒立摆控制技术发明专利获得授权
发布日期:2024-05-13 浏览次数:1526
近日,中科深谷的专利“一种平面运动倒立摆及其控制系统和控制方法”获得发明专利证书,专利号:ZL20180239295.6。
本发明涉及一种平面运动倒立摆,由方型支架、平面运动单元和摆杆部分组成。所述平面运动单元包括第一直线电机、底座、第二直线电机以及一个法兰;所述第一直线电机、第二直线电机空间上十字交叉叠放,第一直线电机提供X轴方向运动,第二直线电机提供Y轴方向运动,合成运动可以沿着平面任意方向运动。所述摆杆部分上端安有高精度姿态传感器,可实时读取摆杆与竖直方向角度和摆杆倾倒数据并传递给DSP控制器,所述DSP控制器进一步根据所述摆杆状态数据进行处理,获得控制量输出数据给电机驱动器。所述平面运动倒立摆系统采用直线电机直接驱动摆杆部分,省去中间传动机构干扰,使得控制更加精确,在军工、航天以及科研教学有着广泛地用途。
中科深谷全系列倒立摆产品
赋能中高级产业人才培养

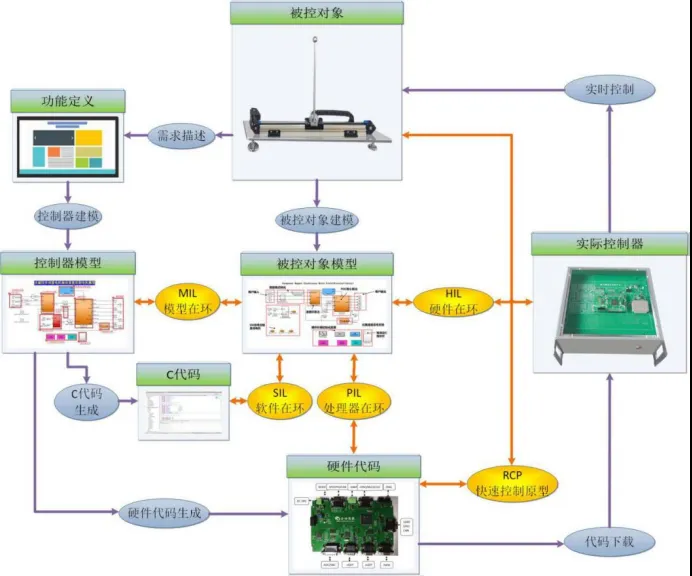
开源直线电机一级(二级/三级)倒立摆系统开源直线电机一级倒立摆(型号:LIP1)是由工业级高精密直线电机、角度传感器、摆杆、控制系统和上位机组成。控制系统是基于TITMS320F28335DSP和MATLAB/Simulink开发,结合计算机仿真和嵌入式实时控制技术,采用基于模型设计(MBD:Model-BasedDesign)开发方法,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,可以完成如LQR最优控制、模糊控制、神经网络控制等运动控制理论的相关实验。
直线电机摆杆可变倒立摆
直线电机摆杆可变倒立摆系统是基于开源直线电机一级倒立摆升级而成,同样由工业级高精密直线电机、角度传感器、摆杆、控制系统和人机交互软件组成,摆杆采用了可自由伸缩的电动推杆设计。控制系统同样是基于TITMS320F28335DSP和MATLAB/Simulink,以及基于模型设计(MBD:Model-BasedDesign)的开发方法,除完成如LQR最优控制、模糊控制、滑模控制、神经网络控制等运动控制理论的相关实验外,还可进行鲁棒、自适应等算法的研究。
双摆智能控制系统
双摆智能控制系统由倒立摆本体、控制系统、伺服系统、角度传感器、人机交互界面和开源算法资源包组成。其倒立摆本体采用一长一短双摆杆并联结构,可自由分解形成两种环形一级倒立摆;控制系统硬件基于DSP开发、软件基于Matlab/Simulink开发;伺服系统支持力矩和加速度两种控制模式;角度传感器使用绝对值编码器,采用CAN总线通信方式;开源算法资源包包含系统建模仿真、根轨迹分析、线性系统矫正、LQR、滑模控制、神经网络控制、强化学习控制等算法案例。
Simulink软件仿真图


