

中科深谷新品发布:开源双轮足机器人教学科研平台
发布日期:2024-09-06 浏览次数:3741
随着机器人在物料搬运、电站等巡检、物流配送、农业采摘等领域的广泛应用,机器人在复杂地形环境下的适应性和多样化应用场景的需求不断增长,同时为满足科研与教育领域对多样化应用场景的研究需求,中科深谷全新推出了基于CSPACE实时仿真控制系统的开源双轮足机器人教学科研平台。

双轮足机器人由双腿机构(具有两自由度)、轮毂伺服电机、控制系统、多种传感器、上位机监控软件以及电源系统等核心部件组成,具备自动直立、直立自平衡、行走、转向、身体姿态控制、双足步态控制及跳跃等多种功能。
全新升级的AI系统
仿真系统、控制系统......
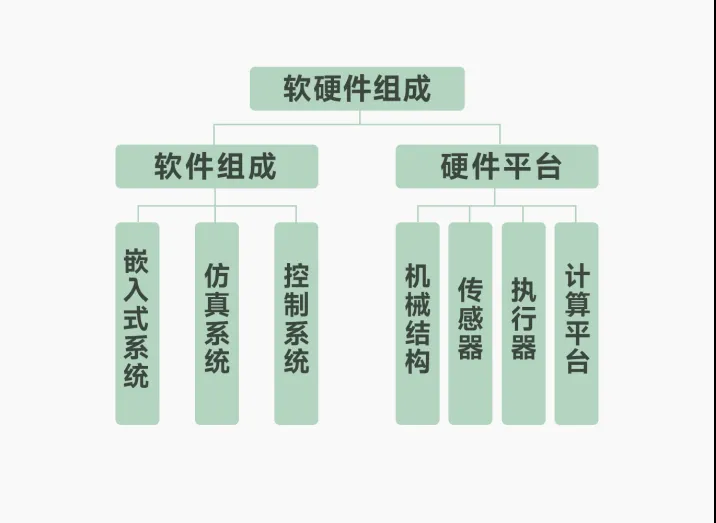
软件方面:
01、嵌入式底层软件系统
机器人采用成熟的企业级嵌入式架构,确保底层运行的可靠性和高效性,为实时运动算法提供强有力的支持,底层软件系统采用CAN总线与电机进行通讯、RS232、RS485、I2C、SPI等接口采集传感器信号和与上位机软件进行通讯控制。
02、仿真系统
在精确的三维模型支持下,通过MATLAB/Simulink进行运动学仿真,实现控制算法的开发和精准的参数调整。仿真系统可以模拟机器人的各种动作和环境条件,帮助开发人员在虚拟环境中优化控制算法和调试机器人行为。
03、控制系统
在MATLAB/Simulink中进行开发,采用全身末端力反馈控制和基于模型的LQR最优控制策略,实现机器人姿态和运动的精确控制。通过多传感器数据融合和先进的控制算法,精确和稳定检测机器人的姿态,机器人能够在复杂环境中保持稳定和高效的运动。
04、上位机软件
双轮足式机器人的用户操作界面,提供了控制过程中参数可视化和下发控制指令等功能,可以通过图形化界面获取机器人控制过程中状态参数的变化来观察控制效果,并通过下发控制参数的方式进行实时调参。

控制系统架构示意图

机器人的数据采集、控制参数在线修改监控界面软件
硬件方面:
01、机械结构
机器人全身采用7071航空铝制造主要受力结构,机身框架使用碳纤维结合榫卯结构,减少螺栓的使用,实现整机的轻量化,还提高了其结构强度和耐用性。
02、传感器
姿态传感器采用自主研发的高精度惯性导航模组,并通过转台标定和温度校准,确保在不同温度条件下传感器数据的稳定性和可靠性。机器人还可扩展激光雷达、视觉和超声波等传感器,以实现多模态感知和环境感知能力。
03、执行器
髋关节和膝关节电机采用机器人专用双编码器减速关节模组电机,配合FOC电机驱动器,实现末端姿态的高精度控制。轮毂伺服电机采用直驱力反馈电机,提供力反馈功能。执行器具备高响应速度和高扭矩输出,确保机器人在各种任务中的灵活性和稳定性。
04、计算平台
底层采用TI DSP实时控制器,应用层使用ARM架构的集成嵌入式芯片,提供强大的计算能力和低功耗特性,支持复杂的实时控制和数据处理任务。此外,计算平台还配备了高速通信接口和大容量存储设备,支持机器人与外部设备的数据交换和长期数据记录。通过先进的计算平台,机器人能够运行复杂的人工智能算法,实现自主决策和任务执行。
05、控制器
双轮足式机器人的核心,负责接收传感器系统反馈的姿态信息和上位机软件或遥控器发送的指令,并将接收到的姿态信息和控制指令经过算法求解转换为对各个关节的控制信号,控制驱动电机,实现自平衡和行走控制。
自平衡、平稳快速移动
敏捷、稳定......
开源双轮足机器人教学科研平台独特的轮腿设计是其一大亮点,该设计赋予了机器人敏捷、稳定和全方位移动的能力。
开源双轮足机器人教学科研平台结合了轮式和双足行走的特点,它可以通过调节轮腿的状态来适应不同的地形和环境,实现高度灵活和稳定的移动。

开源双轮足机器人教学科研平台
产品功能
01、自启动
机器人在初始姿态下上电后,能够自动进行运动姿态的复位,然后通过遥控器切换进入直立控制预备状态,进入操作准备和自动进行运动姿态。
02、直立运动
通过精确的力矩和速度反馈控制,机器人能够在不同的地面条件下保持直立平衡和稳定,适应多种环境需求。
03、高度运动控制
在直立控制的基础上,该模式驱动髋关节和膝关节电机,实现对机器人高度的控制。这种高度调节功能允许机器人根据任务需求进行自适应调整,适应不同的工作环境和任务要求。
04、姿态运动控制
在直立控制的基础上,可以控制机器人在横滚ROLL轴、俯仰PITCH 轴和航向YAW轴上的姿态运动,从而实现多关节联动控制,适应更复杂的地形。通过姿态控制,机器人能够在崎岖不平的地形上保持平衡,并完成复杂的运动任务,提高其在实际应用中的适应能力。
05、walk步态控制
在直立控制的基础上,通过切换到步态控制模式,机器人双腿会协调轮毂电机进行双腿交替前进,实现类人行走。该模式通过精确的步态规划和控制算法,使机器人能够在不同的地面条件下进行平稳的步行,从而扩大其应用范围,如在巡检、救援和服务机器人等领域中的应用。
开源赋予无限可能
软硬件全开源
中科深谷秉承了研发团队开源共享的理念,允许用户使用Python等编程软件进行编程。双轮足机器人软硬件系统可开源,提供丰富的运动学、动力学控制和力反馈控制教程,也包括 MATLAB /Simulink仿真,用户可以在虚拟环境中进行算法验证和系统优化。
开源双轮足机器人不仅可以作为自动化、机器人、机械电子、智能制造、机械工程等专业中《机器人学》、《计算机控制技术》、《机器人驱动与控制技术》、《运动控制系统》、《机电一体化技术》 和《机器人操作系统》等课程的实验实践平台,其全开源性还支持机器人与人工智能领域的科研。通过这个开源平台,老师、学生和研究人员能够深入了解和掌握机器人系统的驱动、运动控制、力反馈控制、平衡控制、建图、定位、导航和多传感器融合等先进技术。
此外,开源双轮足机器人还具备高度的可扩展性,可在本体上层预留模块化安装位置,提供对应的软硬件接口,以满足扩展导航系统、多传感器系统等场景应用工作要求。这使得机器人能够适应更多的工作场景和任务需求,更好地支持科研和教学。
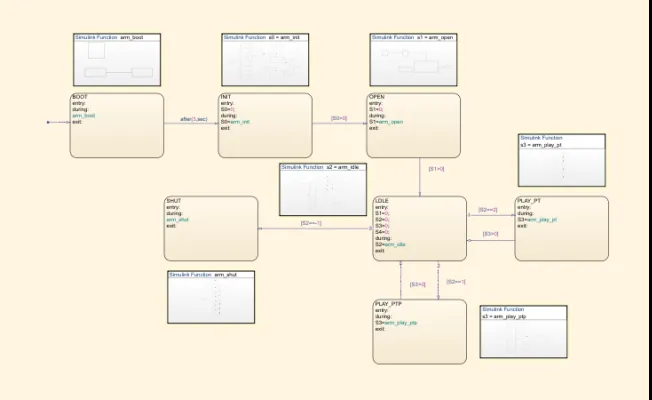
Matlab/Simulink编写的控制程序模型
教育、科研研究
仿真、实验......
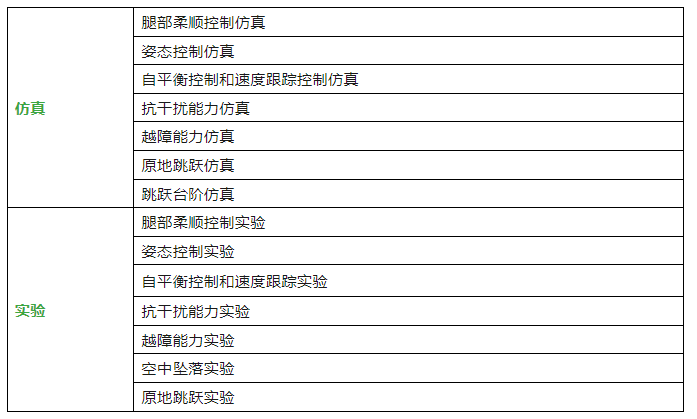
开源双轮足机器人教学科研平台,提供丰富的自动控制、运动学、动力学控制技术和实验,并可扩展3D视觉系统、室内外导航系统、多传感器融合感知系统等功能,使得机器人能够适应更多的工作场景和任务需求,更好地支持教学和科研。
01 实验内容
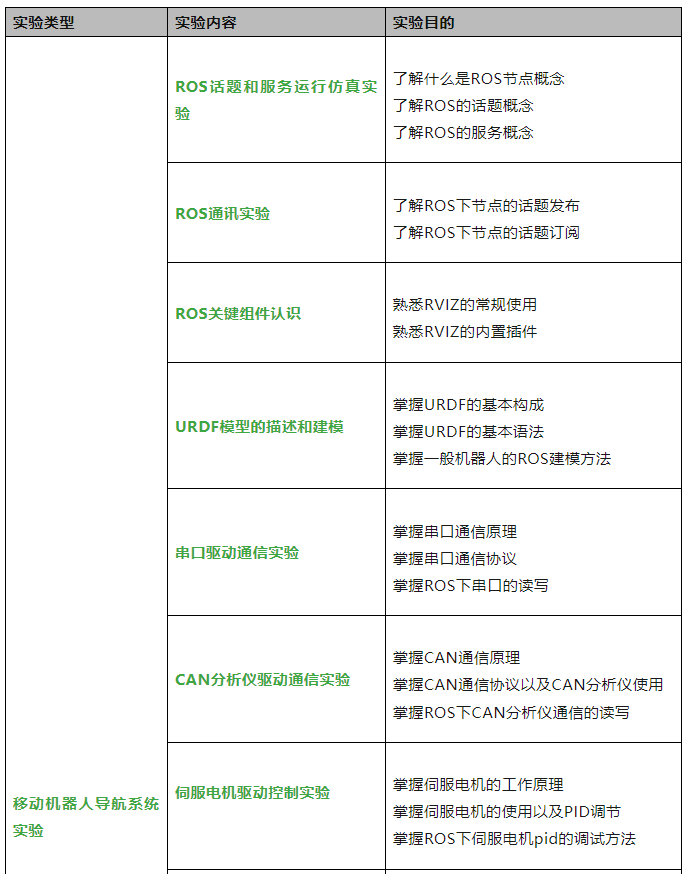
02 可扩展的实验
(1)机器人导航系统实验
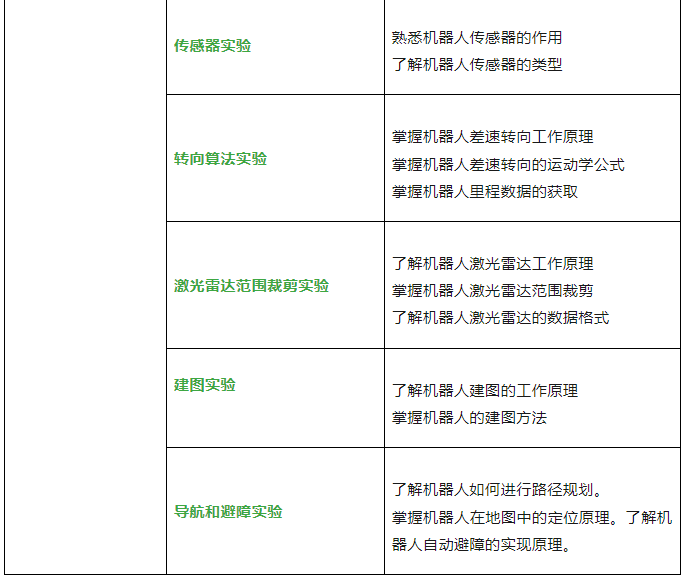
(2)其它高级应用实验

03 支撑科研方向
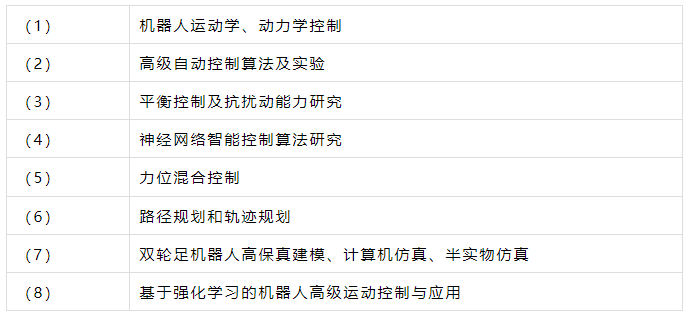
04 可扩展支持的研究



