

中科深谷新品发布:开源小蚂蚁移动机器人
发布日期:2024-09-26 浏览次数:1677
01 背景
传统的巡检方式主要依赖于人工,这种方式存在不少显著的问题,可能会对公共安全和稳定运行产生不利的影响。
传统巡检方式存在的问题
1、无法实现全天候、全覆盖巡检
传统的人工巡检存在时间和空间的限制,无法做到全天候、全覆盖的巡检。
2、人工巡检耗时耗力
传统的人工巡检方式效率低下,需要投入大量的人力和时间成本。
3、巡检质量不稳定
人工巡检受人员技能、经验等因素影响较大,巡检质量难以保证。
4、数据处理与利用不足
传统巡检方式数据采集不全面,无法准确反映设备状态,而且大量巡检数据需要人工处理和分析,效率低下且易出错。
5、设备维护与管理困难
电力设备种类繁多,传统维护方式需要投入大量的人力和物力成本,维护成本高,且缺乏有效的管理手段和工具,无法实现设备的全生命周期管理。
6、安全隐患及风险
由于巡检不到位或处理不及时等原因,电力安全事故频发,安全风险高。
为了提高巡检效率和质量,电力巡检正在逐步从传统的有人巡检转变为无人化和智能化巡检,广泛应用于发电站、变电站、配电站等的监测和维护。它利用先进的无人机技术、机器人技术、人工智能技术等,对电力设备的运行状态进行实时监控,及时发现潜在的故障和异常情况,从而提前采取措施进行修复,这种智能化巡检方式不仅提高了巡检效率,还有助于降低人工成本和避免安全事故的发生。
02 解决方案
为了同时满足科研与教育领域对电力巡检等应用场景的研究需求,中科深谷全新推出了开源移动小蚂蚁机器人,可以在电力领域进行全自动化巡检作业。
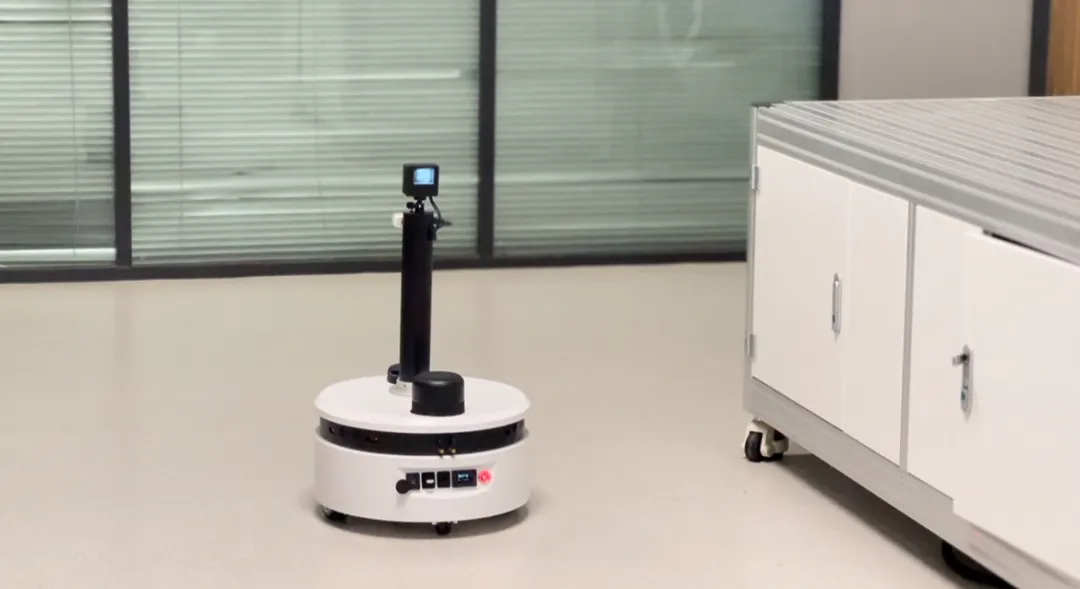
开源小蚂蚁移动机器人由机器人控制系统、机电控制系统、多传感器模块组成。底盘采用两轮差速结构;机器人控制系统硬件采用英伟达控制器,算力可达21 TOPS,软件基于ROS系统,支持多种开发语言及MATLB/Simulink的MBD开发方式;机电控制系统的硬件基于STM32,软件基于freeRTOS嵌入式实时系统,采用C语言开发;多传感器模块包含室内激光雷达,语音传感器,IMU传感器,视觉传感器,超声波传感器,多种测距传感器等。产品包含自研的多传感器信息融合算法、高精度定位导航算法等核心算法包,还可以支持拓展多智能体集群控制算法。
该产品开发方式简单,设计精巧;可支撑《机器人操作系统》、《移动机器人》、《机器人导航与控制》等课程;可作为自动化专业、机器人工程专业、人工智能专业、智能科学与技术等专业的教学设备和科研平台。
产品特点
1、伺服性能优良,车体采用模块化设计,可以适配多种高密度障碍物的室内场景,人机交互友好,使用便捷。
2、控制系统支持采用MATLAB/Simulink软件进行编程,可以更好、更便捷地研究控制算法,并可支撑更高级的控制算法验证。
3、提供多传感器感知周围环境,2D激光、深度相机、多种测距传感器等,支持各类教学内容及控制算法研究。
4、采用高性能计算机作为主控系统,支持人工智能算法的部署;可实现底盘、视觉、导航的控制,满足大量数据的处理运算需求。
5、提供丰富学习与教学资源,帮助学生快速入门和提高。
03 应用案例
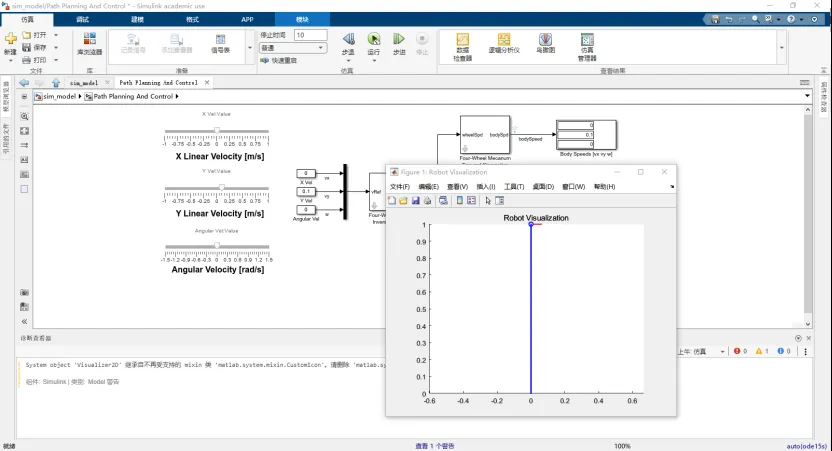
Simulink 运动学控制仿真
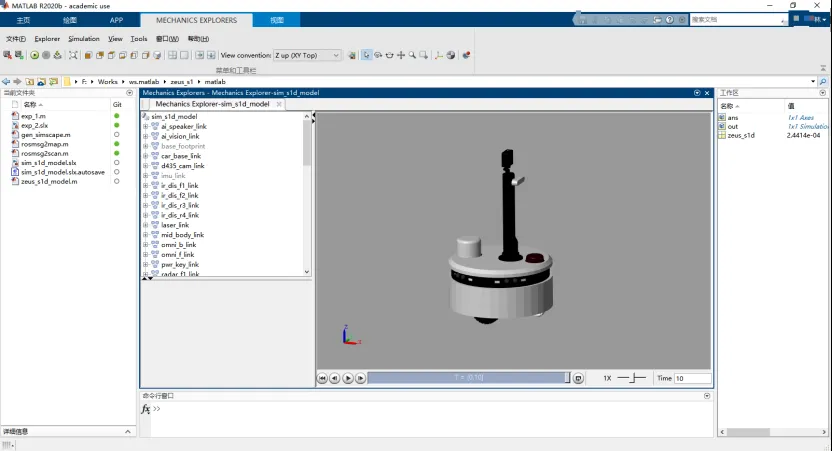 Simscape移动机器人本体模型
Simscape移动机器人本体模型
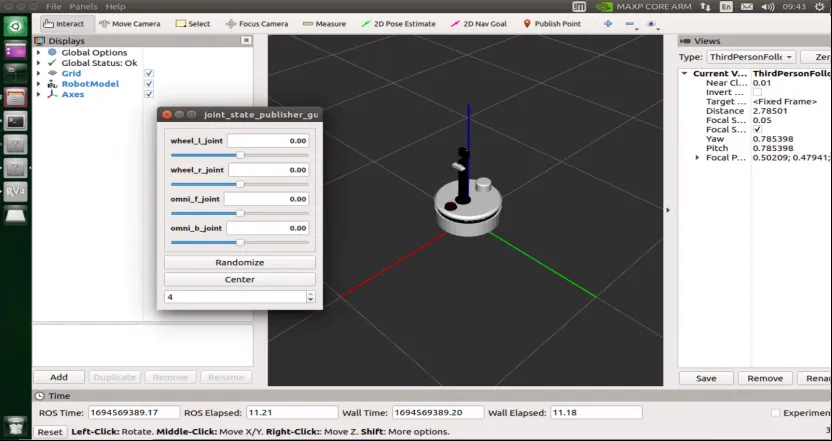
ROS环境下机器人本体模型
 GAZEBO环境下机器人仿真控制
GAZEBO环境下机器人仿真控制


