开课啦!| “开源两轮平衡移动机器人电控系统开发”培训班 —— 2021年人工智能与机器人系列培训之一
发布日期:2021-04-22 浏览次数:4470
想要快速掌握MBD电控系统的开发技能吗?
想要快速掌握两轮平衡移动机器人的电控系统开发知识和经验吗?
本次课程是基于TI DSP和MATLAB/Simulink快速控制原型方法,开发移动机器人底层运动控制系统和基于opencv的机器视觉引导系统,由合肥工业大学甄圣超教授联合众多资深电控工程师为大家带来为期4天的两轮平衡移动机器人系统开发课程。
让我们一起探索开发两轮平衡移动机器人的奥秘吧!。
课程特点:
1.知识点丰富:覆盖TI DSP、树莓派、PID自动控制、电机控制、多种传感器的使用、4G和5G远程控制、MBD工程开发方法、机器视觉等
2.培训讲师开发过众多先进的机器人产品(伺服驱动、运动控制、协作机械臂、移动机器人、复合机器人等)实战经验
3.理实交融,实战训练,能更深入理解和掌握知识
看看我们团队精心打造的平台
好玩好学好工作,成就电控技术达人
智能平衡车是自不稳定的、复杂的被控对象,技术原理应用该广泛,非常适合作为研究平台
· 提供知识覆盖面广的专业学习套件(不仅仅是开发板),包括电子技术、PID等自动控制、单片机、传感器、电机、机器视觉、无线通讯、MATLAB建模仿真等知识;
· 提供国际先进的基于MBD的电控系统开发方法,融合建模、仿真和实时控制;
· 以移动物联网+教育、科研的理念进行设计,提供线上指导和学院之间的交流平台,扩展学员人脉圈子;
· 仿照美国Olin学院、香港科大的教学模式进行开发的学习套件;
· 模块化设计、可扩展性强,可搭载人工智能等开发模块,体积小巧,耐用,把实验室装到书包里,放在寝室里,随时可以学习交流;
· 适合工科大学生、研究生、初级电控工程师等想较深入掌握电控技术的人员和更扎实掌握大学课程知识的学生
· 引导学生学生将理论与实践相融合,提高学生解决复杂工程项目问题的能力,助力参加比赛、科研训练和工程师培养。
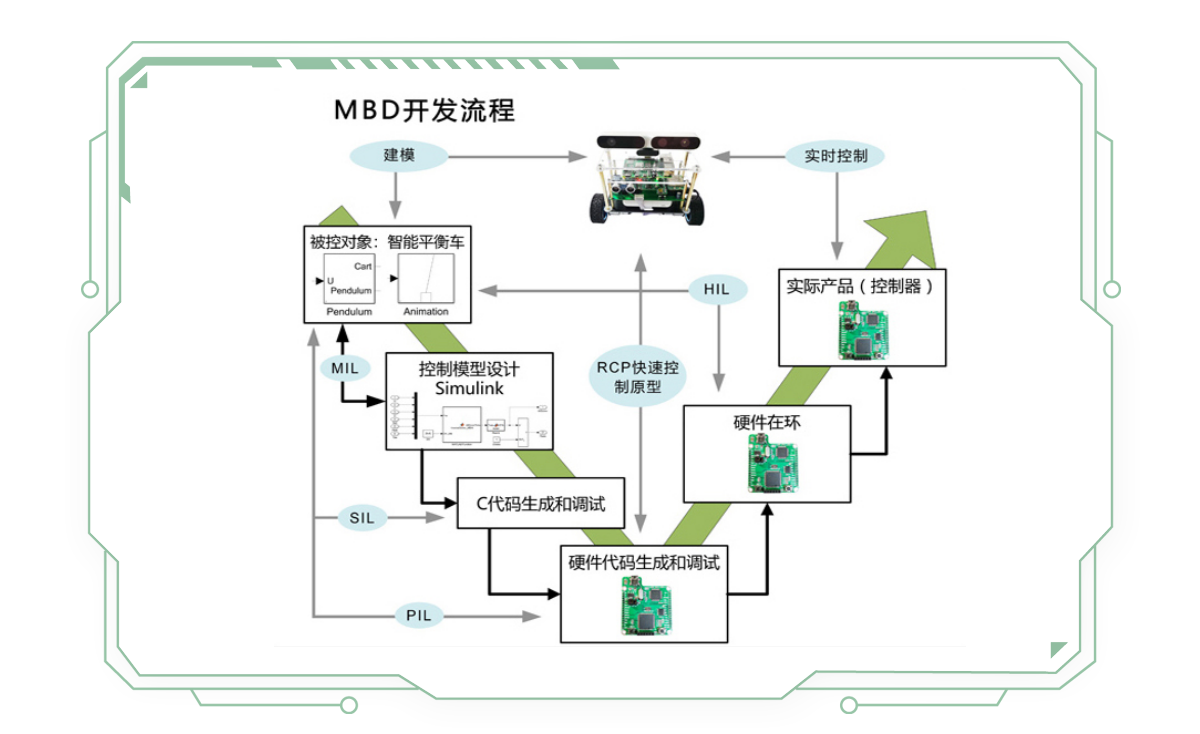
融合理论建模、软件仿真、快速控制原型、硬件在环等先进的MBD工程开发方法
基于模型设计(Model-Based Design,简称MBD)
对象:主要针对汽车、飞机、机器人等电控系统、雷达导航等信号处理系统、电力系统、通信系统等
较复杂的需要单片机或计算机作为主处理器的控制系统设计
措施:综合采用物理建模、计算机仿真、自动代码生成、软件模型与控制器交互测试验证的一种先进的开发方法
软件和硬件平台:MATLAB/Simulink,TI DSP,ARM,x86工控机等
MBD工程方法是一种国际先进、流行的工程应用开发方法,正在被越来越多的产品开发者接受、喜爱和推广。
开发一个产品,如果用传统的开发方式,需要经历项目设计、概念构架、立项、运维、验证等环节,过程繁琐、流程复杂,一旦出问题,得重新来一遍,时间、人力、物力成本都很高。
MBD基于模型的设计理念打破了原有的产品开发思路,将设计任务从实验室和现场转移到电脑桌面,充分利用物理建模、仿真、自动代码生成进行实时控制、HIL硬件在环仿真等技术,从而改变工程师和科学家的工作方式,可以使产品设计开发“只做一次,一次成功”,很多的研究能将开发时间和成本减少50%以上。
近几年来,移动机器人行业发展迅猛,在巡检、物流、工厂生产搬运、医院、实验室自动化等应用极为广泛。本课程参照国际先进和具有应用潜力的Boston
Dynamics的Handle机器人,以两轮平衡移动机器人平台为研究对象和实验载体,围绕基于模型设计的工程方法,设计出两轮平衡移动机器人的自平衡运动控制系统,蓝牙、4G、wifi等无线控制技术,机器视觉和目标识别跟随技术。通过本课程的学习,学员能熟练掌握基于模型设计的工程方法,理解移动机器人的知识和经验,能快速开发出属于自己的移动机器人产品。
掌握Simulink基于模型设计整套流程:建模-仿真-代码自动生成-硬件在环测试
开源两轮平衡移动机器人电控系统开发(嵌入式系统、PID平衡控制、远程控制、目标跟随等)及机器视觉等核心内容和关键技术
具备独立开发移动机器人的能力
更好地成为机器人领域的复合型人才,提升软件开发能力、分析能力、设计能力、代码文档管理及展示能力。
掌握MBD的基本知识与方法
掌握树莓派、TI-DSP、机器视觉的基本知识
掌握移动机器人开发中常见问题的解决方法
掌握嵌入式开发实现的流程和方法
掌握机器人4G、5G远程控制技术
掌握机器视觉开发流程
机器人企业技术负责人/工程师
希望掌握能利用MATLAB/Simulink进行开发产品和项目的学员
新工科专业方向的相关教师
人工智能、机器人、自动化、汽车电子、电子技术、机械、机电、计算机等专业的学生
传统V字型设计转向基于模型设计
课程介绍
通过本次课程,你将:
培训目标
目标受众
本次课程主要以两轮平衡移动机器人实验平台作为载体,课程时间为4天,课程内容十分丰富,让学员在短时间内高效地掌握两轮平衡移动机器人电控系统的开发方法和相关知识。为了协助学员更好地学习,我们也会在课程开始前将部分理论学习资料提前发放给学员。课程具体安排如下:
//////// Day 1 ////////
上午:
开班典礼
人工智能与机器人技术及其发展趋势、人工智能与机器人工程师技术发展规划
基于模型设计工程开发方法以及本次课程的总体介绍
讲解实验平台、实验流程、实验课程等;包括与本门课程相关的两轮平衡移动机器人的设计与控制理论知识等。
搭建实验平台和安装开发软件:安装MATLAB 2018b CCS 6.2(自行在网上下载安装,网上有很多公开的资源)
下午:
嵌入式开发流程及两轮平衡移动机器人平台介绍
控制系统开发流程、软硬件设计架构、功能介绍。
教学平台动手实验
利用手机APP模型测试实验平台,体验开发两轮平衡移动机器人的功能。
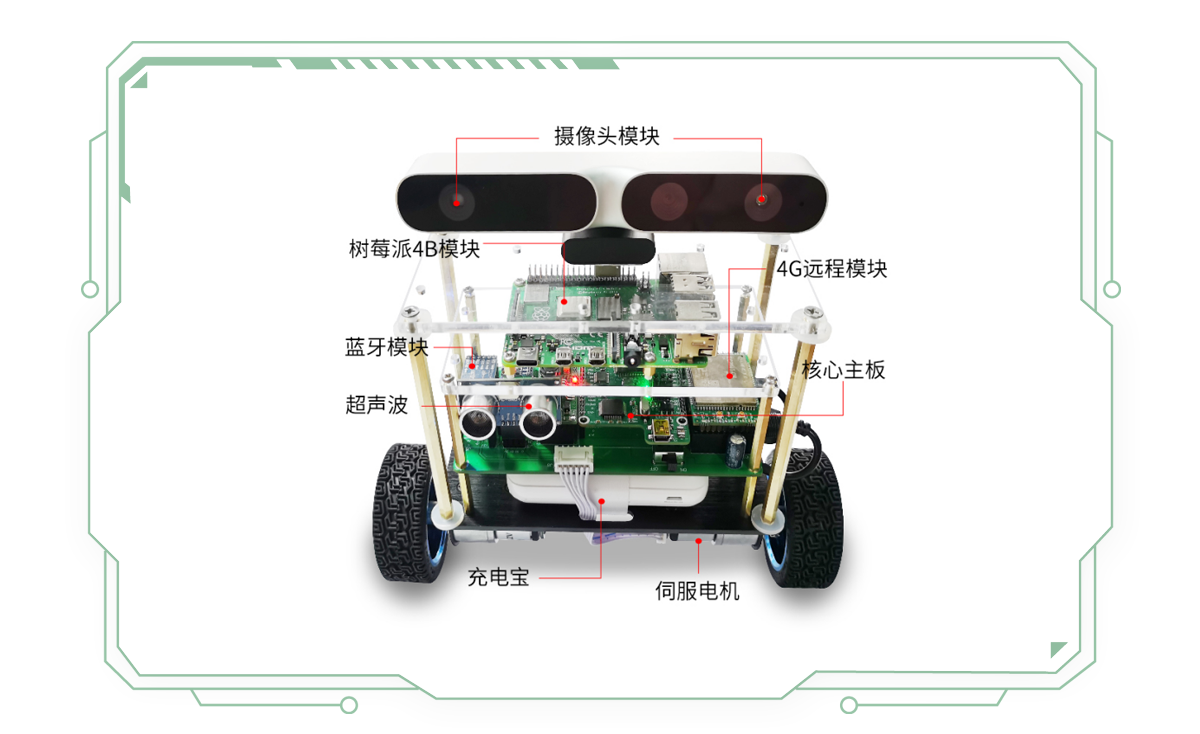
机器人各模块零部件介绍
底盘,伺服电机,TI TMS320F28069 DSP,蓝牙,WIFI,4G模块,摄像头,树莓派等
DSP嵌入式系统开发基础实验
时钟控制,GPIO输出——LED跑马灯,GPIO输入——按键实验,定时器中断——Timer0 Interrupt
等其它相关外设实验
//////// Day 2 ////////
上午:
两轮平衡移动机器人基础外设实验
通过基础实验可以让学员们基本了解和认识DSP的工作原理和常用外设接口,对后期基于模型设计有个充分的认识和理解。
SCI通信实验:通过配置SCIB模块,设定波特率、奇偶校验位,实现DSP与电脑之间的通讯。
ADC控制LED:通过配置ADC模块,控制两个LED的亮灭。
OLED显示:介绍OLED12864的工作原理,实现浮点型、整数型、字符型数据的显示。
ECAP超声波测距:介绍超声波传感器的工作原理,通过eCAP模块实现超声波测距。
ADC采集电池电压并在OLED实时显示:介绍电压采集芯片的工作原理,介绍如何获取主控板的电压和电池的电压。
下午:
两轮平衡移动机器人进阶实验
通过进阶实验可以让学员们掌握平衡控制所应用到外部传感器工作原理和使用方法,然后通过PID控制算法实战开发两轮平衡移动机器人自平衡的功能
EQEP编码器信号采集:介绍霍尔编码器的基本原理,通过eQEP模块实现电机转速的测量。
PWM脉冲输出实验:介绍直流电机驱动芯片工作原理,通过ePWM模块实现直流电机的正反转。通过配置ePWM模块,调节占空比的大小,实现单路或者双路PWM输出。
ECAP捕获PWM脉冲实验:通过配置eCAP模块,实现捕获PWM的脉冲、周期、高低电平的计数值、占空比。
MPU6050数据读取:介绍MPU6050的工作原理,介绍如何获取MPU6050机器人角度数据。
平衡控制基础实验:通过前面的实验打下铺垫,进一步介绍如何搭建直立控制,使机器人在直立环的PD作用下实现直立控制,以及介绍如何确定KP、KD的极性和大小,分析直立环的直立平衡效果。
//////// Day 3 ////////
上午:
远程控制技术实验
平衡控制+wifi、蓝牙控制:在实现平衡功能后,介绍如何通过运动控制和SCI蓝牙通讯,实现手机、PC控制机器人的前进、后退、左转、右转。
平衡控制+4G远程控制:在实现平衡功能后,介绍如何通过运动控制和互联网网络实现远程控制机器人的前进、后退、左转、右转。
下午:
两轮平衡移动机器人simulink模型实验
MATLAB/Simulink基本介绍,TI DSP Simulink工具箱介绍,基于MATLAB/Simulink联合实时控制平衡移动机器人,该实验包括Simulink建模、SIL和PIL的介绍,OLED液晶的使用、MPU6050数据的获取、微处理器TMS320F28069的PWM、ECAP、EQEP、ADC等模块相关的知识点和PID控制原理
SPI自发自收实验:通过配置SPIA模块,实现在Extern模式下调节占空比大小与数据动态显示。
PWM电机调速:通过simulink TI-28069工具箱ePWM模块实现直流电机的正反转。
EQEP编码器信号采集:建立模型通过eQEP模块实现电机转速的测量。
MPU6050数据读取:搭建simulink模型读取IMU数据信息
速度闭环控制实验:通过搭建simulink模型实现电机速度环控制,使电机定速运转
平衡控制基础实验:通过前面的实验打下铺垫,进一步介绍如何通过使用Simulink搭建直立控制,使机器人在直立环的PD作用下实现直立控制,以及介绍如何确定KP、KD的极性和大小,分析直立环的直立平衡效果。
//////// Day 4 ////////
上午:
python树莓派
树莓派系统的应用和linux-python环境,了解树莓派功能,掌握树莓派系统的使用,能够使用python在树莓派系统上开发基本的应用程序
机器视觉
基于opencv图像处理算法的应用:图像处理算法,阈值处理,二值化处理,图像读写操作,滤波卷积,图像几何变换操作,直方图和模板匹配,轮廓检测,相机标定与配置,机器学习-人脸识别技术等
下午:
目标跟随综合实验
基于移动平衡机器人实现目标识别和目标跟随功能实战
考核、互动交流、结业典礼、颁发证书
授课地点:安徽|合肥市包河区花园大道与和黑龙江路交叉口合肥工业大学智能制造研究院
2021年4月17日-2021年4月20日
(周六-周二)
本期培训收费标准为4000元/人,主要包含教材与资料费、培训费、设备使用费、证书费等。参加培训学员的交通费、食宿费自理。联系人:吕老师电话:15556933805