

赋能智能驾驶!中科深谷创新控制策略有效提升汽车线控转向系统控制性能
发布日期:2025-03-27 浏览次数:864
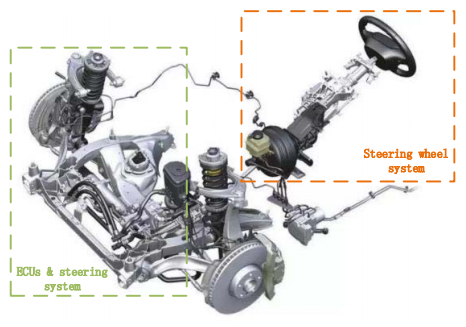
在智能驾驶领域,线控转向(Steer-by-Wire, SBW)系统通过电子信号取代传统机械连接,显著提升了车辆的灵活性和操控性。然而,系统参数变化、外部干扰等不确定性因素会导致控制性能下降。传统方法(如概率模型)依赖大量实验数据,难以实时应对复杂场景。如何精准描述不确定性并设计高效控制策略,成为智能汽车发展的关键挑战。
基于此背景,中科深谷技术团队结合模糊集理论和纳什博弈优化方法,提出了一种高效的控制策略,可提高线控转向系统在不确定环境下的稳定性和操控性,增强智能车辆在复杂环境中的适应能力,从而赋能智能汽车行业发展。
什么是“模糊集理论”?
模糊集理论由L. A. Zadeh于1965年提出,用于描述现实中的模糊性与不确定性。与传统集合论“非0即1”的二元划分不同,模糊集通过隶属度函数(取值0,10,1)量化元素对集合的归属程度(例如,温度28℃可被定义为“高温”的隶属度为0.7)。这一理论突破了精确数学模型的限制,能够直接处理“接近”“大致”等模糊语言,尤其适用于动态系统中时变、有界但难以精确描述的不确定性。在控制领域,模糊集为模糊控制提供了数学基础,通过模糊规则(如“若误差较大,则增大控制量”)将人类经验转化为系统决策,从而实现对复杂非线性系统的高效鲁棒控制。本研究将其应用于线控转向系统,将不确定性建模为模糊数,并结合纳什博弈优化控制参数,显著提升了系统的稳定性和实时性。
什么是“纳什博弈”?
纳什博弈是非合作博弈论的核心概念,由约翰·纳什提出,指多个参与者在不合作的情况下,通过选择最优策略达到“纳什均衡”——此时任何一方单方面改变策略都无法获得额外收益。在本研究中,控制参数(如κ和ζ)被视为博弈中的“玩家”,各自通过成本函数(反映系统误差和控制能耗)独立优化目标。通过求解纳什均衡,找到参数的最优组合,实现性能与能耗的平衡:既确保线控转向系统快速收敛到稳定状态,又避免过度控制输入导致的能量浪费。这一方法突破了传统单一目标优化的局限,为复杂动态系统的多目标协同优化提供了新思路。
研究内容
针对具有模糊时变不确定性的动态系统,本研究提出一种基于高阶控制与博弈优化的复合控制策略。该系统具有两个特点:
(1)不确定性由模糊数界定边界的模糊集合描述;
(2)系统满足Lyapunov理论下的全局一致有界特性。因此,为提升控制性能并降低能耗,首先应用非合作博弈论通过建立纳什博弈来优化参数。再针对与模糊数相关的不确定性,提出了D操作。最后,对线控转向系统进行了数值模拟以进行验证。
研究亮点
模糊不确定性建模:将不确定性量化为“模糊数”,通过隶属函数动态描述其边界(如“接近1”或“接近10”),无需依赖统计实验,更贴合实际工程需求。
高阶鲁棒控制设计:基于Lyapunov理论设计控制器,确保系统稳定(一致有界性UB/一致最终有界性UUB),应对时变干扰。
参数智能优化:将控制参数视为博弈中的“玩家”,通过纳什均衡平衡系统性能与控制能耗,实现全局最优。
仿真验证:依托CSPACE通用具身智能类脑系统对比传统LQR控制,新方法将稳态误差降低30%,控制能耗减少20%,响应速度提升显著。

实际应用价值
本研究策略有效提高了线控转向(SBW)系统在不确定环境下的稳定性和操控性。同时能够优化控制参数,实现性能与控制成本的平衡,降低计算复杂度,提高系统实时响应能力。研究成果在智能驾驶、自动驾驶以及电动助力转向(EPS)等领域具有广泛应用价值,不仅能够减少机械磨损,提高系统可靠性,还能增强智能车辆在复杂环境下的适应性。
此外,本研究依托CSPACE通用具身智能类脑系统仿真实验验证了该控制策略的优越性,相较于传统LQR控制,具有更优的误差收敛性和控制输入优化效果,为实际工程实现提供了坚实的理论支撑。这一研究对于推动智能交通与先进车辆控制技术的发展具有重要意义。
智能汽车是未来最具发展潜力与变革性的行业之一,中科深谷将依托深谷通用具身智能类脑系统,坚持开源开放软硬件系统与算法模型,持续进行核心技术攻关,为智能驾驶领域提供更加高效、安全、可扩展的解决方案,赋能智能汽车产业高质量发展。


