

SCI论文 | 深谷模糊自适应鲁棒控制新方法有效提升欠驱动机械系统轨迹跟踪精度
发布日期:2025-05-21 浏览次数:739
欠驱动机械系统(UMSs)在人形机器人、航空航天、智能驾驶等领域应用广泛,但其轨迹跟踪性能的提升面临着两大挑战:(1)非完整约束的强非线性特性致其难以精确建模;(2)不确定性严重影响控制精度。传统描述不确定性的方法,如概率理论,存在与现实世界联系弱等缺点。而模糊理论因其对边界模糊系统的强大描述能力,成为解决这些挑战的新方向。
中科深谷技术团队提出基于模糊系统理论的控制器设计方法。将模糊不确定性融入动力学模型,把参考轨迹转化为伺服约束,这一方法能使UMSs系统完成高质量的轨迹跟踪任务,成功实现UMSs的高精度轨迹跟踪。
此研究成果以《Fuzzy-Based Controller Synthesis and Optimization for Underactuated Mechanical Systems With Nonholonomic Servo Constraints》为题发表在《IEEE TRANSACTIONS ON FUZZY SYSTEMS》(IEEE模糊系统汇刊)期刊上。
研究思路
01 模糊动态建模
将不确定性量化为模糊数,构建更贴合实际工况的系统模型。
02 闭式解控制器设计
设计自适应鲁棒控制器,通过分解矩阵、设定控制律,证明其能保证系统的一致有界性和一致最终有界性。
03 全局参数优化
优化控制器增益参数,设计模糊性能指标,求解得到最优值并证明其存在唯一性。
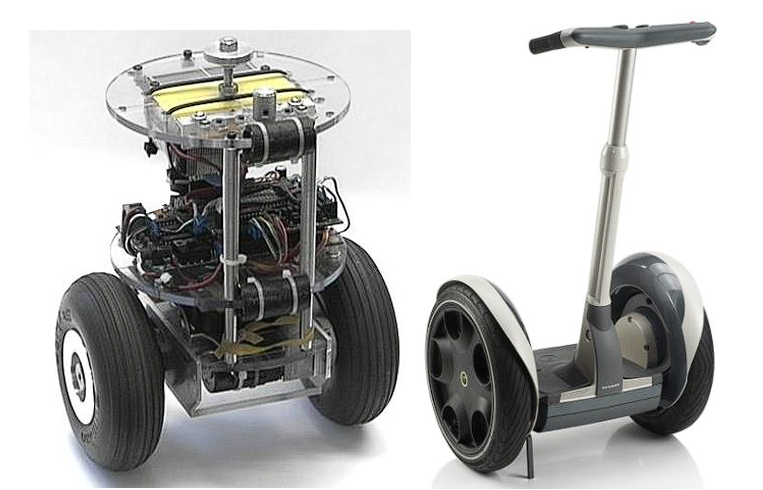
04 实验验证
依托中科深谷异构协同智能类脑系统,以欠驱动两轮倒立摆移动机器人为对象进行仿真及测试,结果验证了该方法在跟踪非完整伺服约束上的有效性,且展示了不同权重因子对控制效果的影响。
研究亮点
理论创新:创新性地将模糊集理论与非完整伺服约束结合,为复杂系统控制提供新范式;
工程友好:控制器闭式解设计简化了工程实现,异构协同智能类脑系统支持仿真和快速算法验证,极大缩短开发周期;
灵活优化:通过权重因子调整,实现控制鲁棒性、动态响应速度等性能指标的协调,灵活适配不同场景需求。
实际应用价值
本研究提出的基于模糊系统理论的自适应鲁棒控制方法,已展现出多领域应用潜力。
▷ 机器人工程
本方法通可显著提升人形机器人、欠驱动步行机器人等的运动控制精度。特别是在复杂地形环境下,系统能够实现多自由度协同控制,有效优化动态平衡调节机制;
▷ 车辆工程应用
该技术可应用于水下车辆、无人驾驶车辆,提升车辆动态性能,增强对非完整约束轨迹的跟踪能力,确保行驶安全与高效;
▷ 康复医疗
本方法有助于康复机器人更好地满足患者个性化康复需求,精准跟踪非完整伺服约束,提高康复训练效果。



