

人形机器人如何实现在非结构化环境中“应对自如”?
发布日期:2025-08-21 浏览次数:247
人形机器人已在复杂非结构化环境(如灾难救援、家庭服务、工业生产)中展现出独特的应用潜力。其核心优势在于高维度的操作灵活性,具备动态平衡能力、多任务协调执行能力以及复杂环境交互能力。然而,这也要求人形机器人系统必须具备高度的通用性以应对多样化的任务场景,极强的可靠性确保长期稳定运行,以及卓越的鲁棒性以抵抗内部参数变化和外部环境扰动。
针对上述挑战,本期《深谷开源智脑系统赋能科学研究专题分享》收官篇聚焦人形机器人的多任务协调运动控制与鲁棒分层控制体系构建,旨在提升其在复杂动态环境下的稳定性、适应性和整体性能。
机器人系统稳定性分析
为满足控制精度与快速响应需求,研究首先从软硬件层面分析了人形机器人(以Unitree H1为平台)的设计要求及其数据交互机制。基于零力矩点(ZMP)理论与线性倒立摆(LIP)理论,建立了机器人静态站立与动态行走的稳定性判据。鉴于关节电机的高扭矩与快速响应特性,为确保启动与调试过程的安全,设计了三重安全机制:软件限幅、调试模式与不等式约束算法,以保障多关节协同运行的安全性。
摆动相步态规划
首先给定机器人的运动目标以及初始化姿态,运动目标包括人形机器人质心高度以及期望的运动速度等运动参数,初始姿态为机器人运动之前需要达到的准备姿态。IMU&驱动器数据处理单元接收到机器人实时驱动器状态以及IMU信息,经状态估计器处理后将腿部状态估计,将足端实时状态输送到状态机。状态机与计时器结合进行腿部相位的切换以及周期计数。根据当前相位,整体控制器分为支撑相与摆动相控制器。摆动相控制器通过逆运动学解算完成任务空间到关节空间的映射,最终通过关节伺服控制驱动摆动腿。
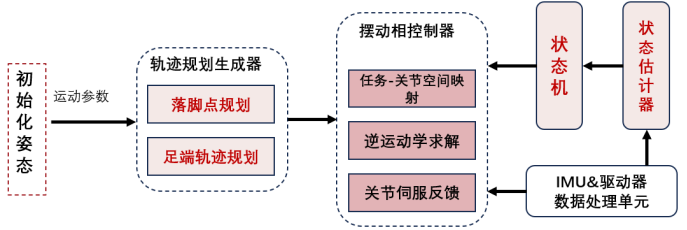 图:步态规划总体框架
图:步态规划总体框架
运动学与动力学建模
采用改进D-H参数法建立下肢运动学模型,推导连杆坐标系间的齐次变换矩阵,确立足端与机体质心的相对位姿关系。通过解析法求解腿部逆运动学,建立足端坐标与关节角度的映射。为支撑动态性能需求与分层控制算法,进一步构建了单刚体动力学模型、浮动基座动力学模型及单腿多刚体动力学模型。
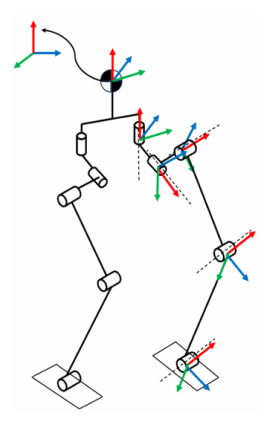
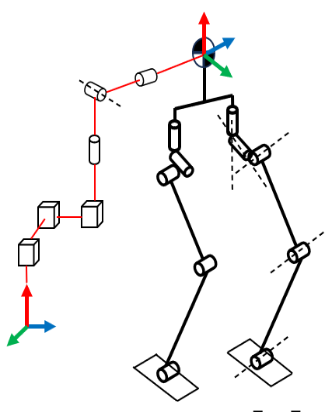
图:改进D-H建模与浮动基座模型
分层协调控制算法架构设计
研究提出一种分层协同控制架构:
▶上层(任务规划与力控): 模型预测控制(MPC)生成下一周期足端最优接触力。
▶中层(全身任务协调): 基于零空间投影的全身控制(WBC)严格按优先级执行运动任务,输出基于任务的关节空间指令。
▶底层(关节扭矩控制与跟踪): 通过松弛优化方法融合足端虚拟力与关节指令,计算期望关节扭矩。在传统PVT(位置-速度-扭矩)控制基础上引入鲁棒项,确保关节电机对目标指令的高精度跟踪。

图:分层控制框架
抗干扰与复杂地形环境实验验证
研究借助pinocchio动力学库对人形机器人的动力学参数进行了辨识,并分别在mujoco仿真平台与unitreeH1人形机器人实物平台上开展了稳定行走、抗干扰能力及鲁棒性等方面的仿真实验与验证。实验结果表明,所提出的分层控制算法在提升机器人稳定性与鲁棒性方面具有显著效果,从而验证了算法设计的有效性与可靠性。
 图:越障过程中姿态角变化曲线图
图:越障过程中姿态角变化曲线图
研究系统性地提出了面向复杂非结构化环境的人形机器人分层控制架构,从稳定性理论、步态生成、建模方法到算法实现与实验验证,形成了一套完整的技术闭环。该控制体系在仿真和实物平台中均表现出良好的动态性能、抗干扰能力和地形适应性,为人形机器人在真实场景中的稳定、柔顺作业提供了关键理论支撑与工程实现路径。
深谷开源智脑系统高效赋能科学研究
中科深谷CSPACE异构协同智脑系统构架采取大模型、多模态感知、实时决策、建模与仿真和物理执行等,可以让智能体与物理环境动态实时信息交互,实现自主学习、决策与行动。系统以模块化、开放性为特点,用于解决智能体对环境和任务的建模、仿真、自主决策、自主控制过程,除了能控制单个智能体对象完成作业任务外,还具备群体智能控制能力,可以让更多的智能体融合到一起,开展分工协作任务。
CSPACE智脑系统可为科研探索提供高效、可靠且通用便捷的综合性解决方案,有效助力前沿技术研究与创新突破。欢迎咨询!


