

中科深谷发布辣椒视觉分拣作业平台,助力农业智能化升级
发布日期:2025-10-20 浏览次数:172
中科深谷推出基于ROS的辣椒视觉分拣作业平台,该平台融合协作机器人、3D视觉与深度学习技术,实现辣椒等果蔬的自动化识别与无序分拣,助力农业分拣环节智能化、高效化。
研发背景
果蔬分拣在整个农业生产运输链中占据重要比重。然而,传统农业中的分拣工作长期依赖人工,存在效率低、成本高、劳动强度大、质量稳定性不足等问题,难以适应现代化产线要求。
随着人工智能与机器人技术的快速发展,农业领域正迎来智能化转型的关键时期。中科深谷智能果蔬分拣系统结合协作机器人与机器视觉技术,为农业分拣环节提供了可行且高效的自动化解决方案,推动现代农业向标准化、规模化方向发展。
一体化智能分拣平台,实现高效精准作业
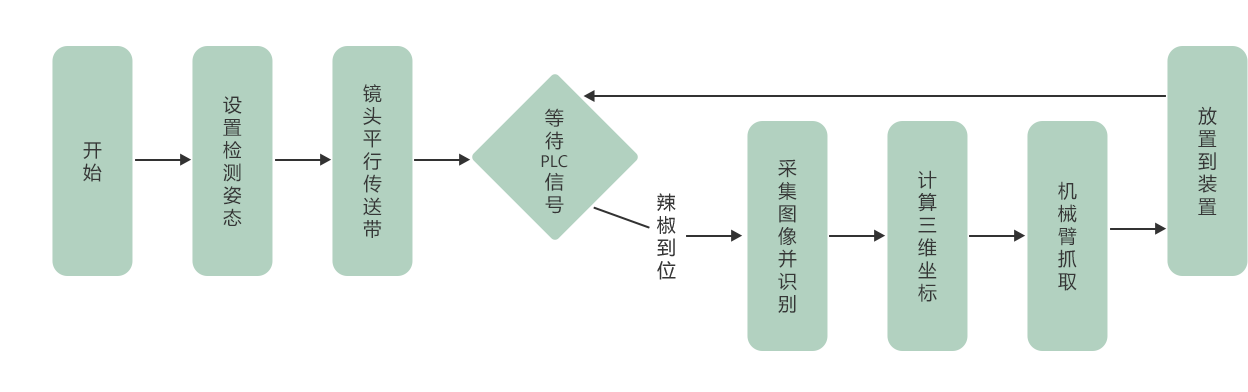
中科深谷辣椒分拣平台由高精度协作机械臂、RealSense深度相机、柔性夹爪、传送带与振动上料器等核心组件构成,形成完整的“识别-定位-抓取-分拣”闭环系统。
高精度机械臂:重复定位精度达±0.02mm,具备灵活运动与稳定抓取能力;

3D视觉系统:RealSense相机广角景深覆盖,支持多角度图像采集,精准识别辣椒类型与等级;

自适应夹爪:行程14–120mm,可抓取多种尺寸辣椒模型;

自动化流程:从视觉识别到分类放置,全程无需人工干预。
深度视觉+视觉标定,提升识别鲁棒性
平台采用深度学习算法处理图像,结合非对称圆网格标定板进行相机标定,确保在不同光照、物体姿态等条件下仍能准确识别辣椒形态与位置,有效应对多品种、多尺寸的分拣任务,具备良好的环境适应性与系统稳定性。
应用场景广阔,赋能产业与教育
该平台可拓展至真实农田、食品加工厂等实际生产环境,为辣椒及其他果蔬的分拣提供可复制的技术方案。同时,也可以作为高校与科研机构在机器人、人工智能、农业工程等专业的教学与科研平台,支持课程实验、算法验证、系统集成等教学与研究需求,推动产学研深度融合。
 图:平台可支持科研方向
图:平台可支持科研方向
中科深谷将持续推进机器视觉与机器人技术在农业领域的创新应用,为现代农业智能化升级提供可靠的技术支撑与装备保障。


