
山东大学使用CSPACE-V3搭建柔性机器人科研平台
2021-09-03
01 研发背景
柔性机械臂由柔性材料制作,具有高柔顺性、复杂环境适应性及安全人机交互性等特点,在工业生产、医疗手术、救灾探测、生活护理等方面具有广阔应用前景,受到国内外学者及机构的广泛关注和研究。
客户自己搭建一套机械臂结构,希望我司协助选型电机并匹配好对应驱动器,搭建好控制系统,同时结合我司基于深度学习的视觉平台,用CSPACE-V3作为控制器实现柔性机械臂的控制。采用MBD的开发方法,结合MATLAB/Simulink,实现柔性机械臂控制系统的建模仿真及实时控制功能。

02 平台特点
一、CSPACE-V3
1.支持RCP快速原型设计,图形化编程,实现用户的MATLAB/Simulink仿真模型到嵌入式控制原型的自动转换。
2.支持HIL硬件在回路测试,用户的控制器等实物设备可以直接与CSPACE仿真器连接,动态验证实物控制器性能。
3.IO资源丰富,有丰富的IO板卡资源供用户选择,包括:SCI、PWM、CAN、RS232/485、GPIO、SPI等。
4.可在线修改多达15个变量,实时显示10组变量并自动存储数据。
5.应用领域广泛、操作便捷、性价比极高。
6.丰富的应用案例,便于用户使用,能快速搭建电控系统。
7.采用DSP作为主处理器,可独立于计算机而工作,也容易实现产品化设计。
8.强大的技术支撑,可以提供定制化开发服务,协助研究人员做好科研项目。
二、基于深度学习视觉的伺服平台

1.高度模块化,可以自由搭配各种视觉场景的使用。
2.支持视觉算法的硬件加速
3.采用主流深度学习框架pytorch,有利于学术研究。
4.可以支持多种视觉传感器
5.对外提供多种方式的控制接口
6.支持tensorrt模型的加速推理
7.针对不同的应用场景,支持多种检测模式
8.实验案例内容丰富详细,包含大篇幅的技术及知识点介绍
9.资料完全开放,支持二次开发,提供二次开发技术支撑
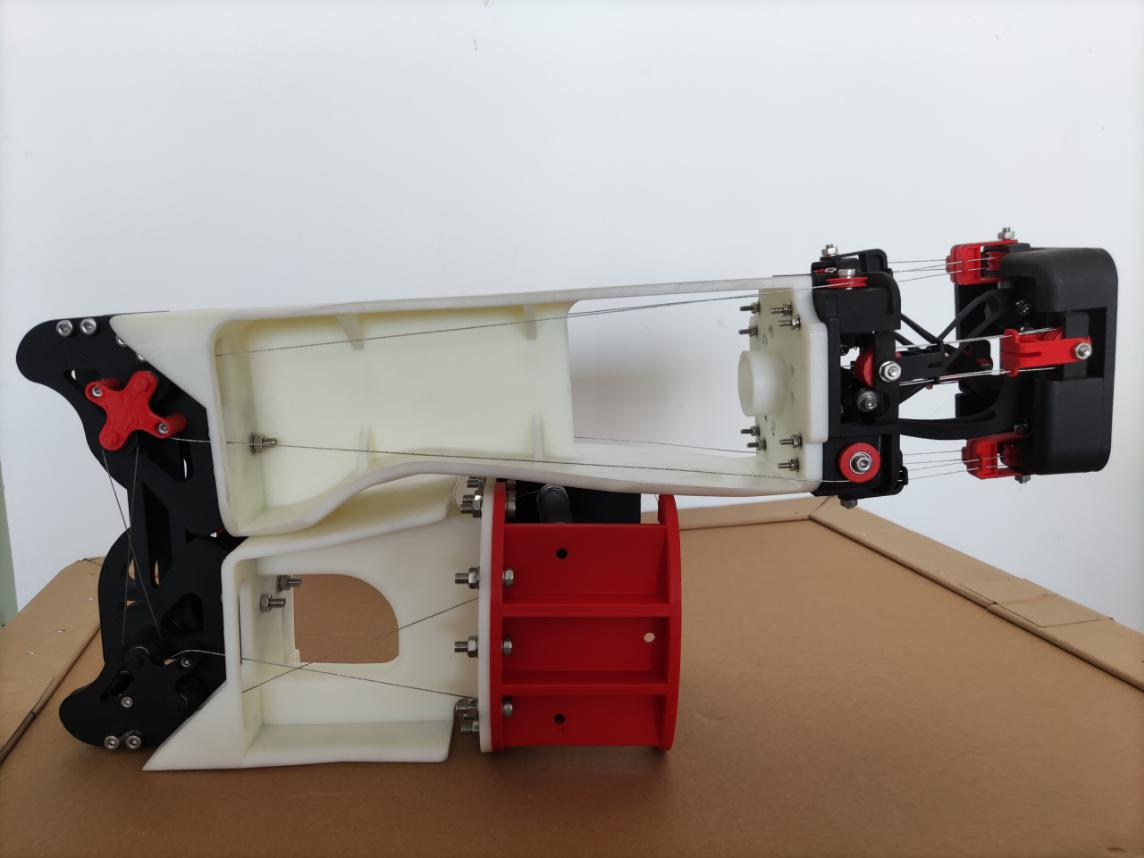
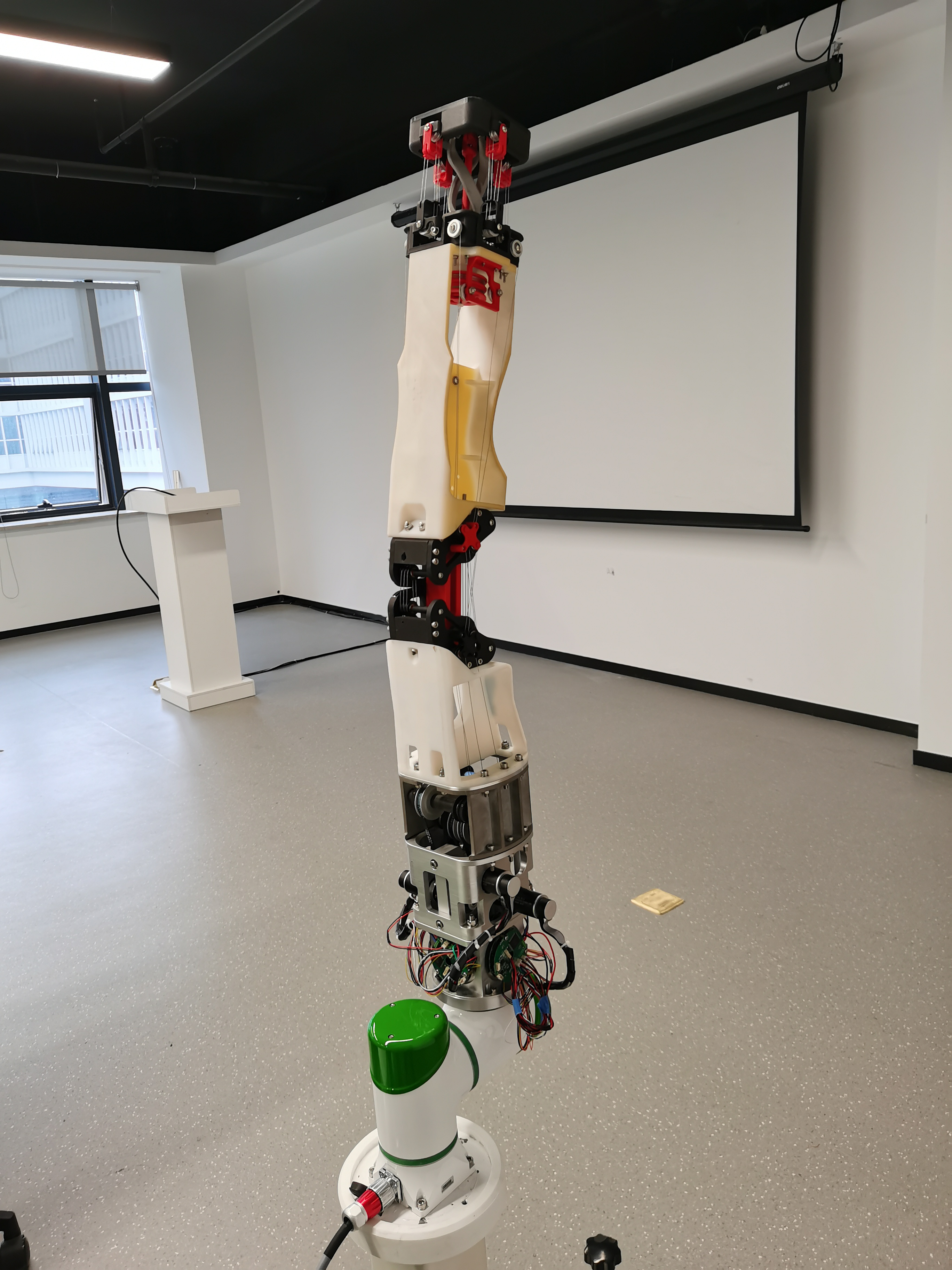
03 实验介绍
柔性臂底下两个关节采用我司的关节模组,上面4个关节采用柔性关节。
主要开发过程:
①电机选型,驱动器匹配
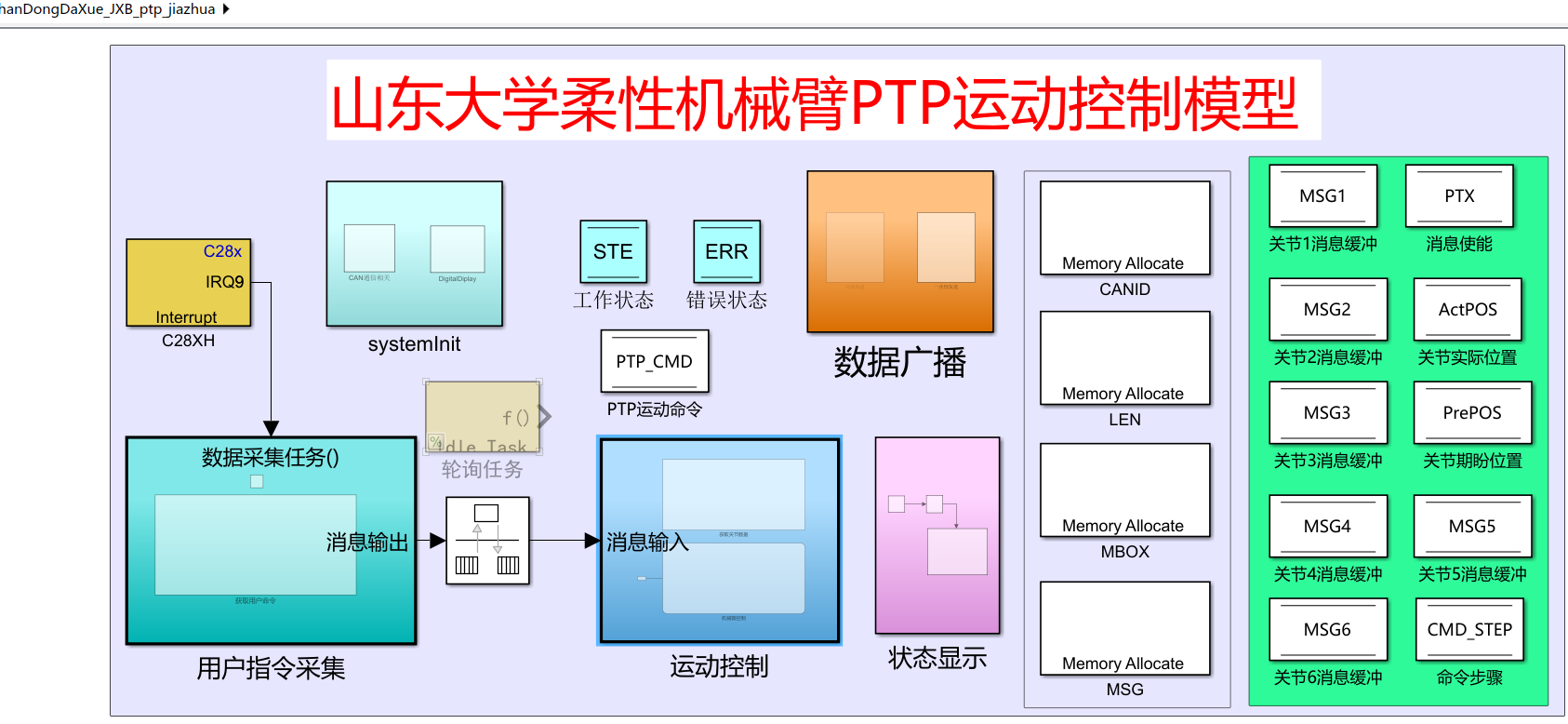
②控制系统模型搭建,调试
③视觉伺服平台搭建,调试
④采用CSPACE-V3实现对机械臂运动学的控制
⑤结合视觉平台,完成手眼标定,实现机械臂的视觉引导抓取
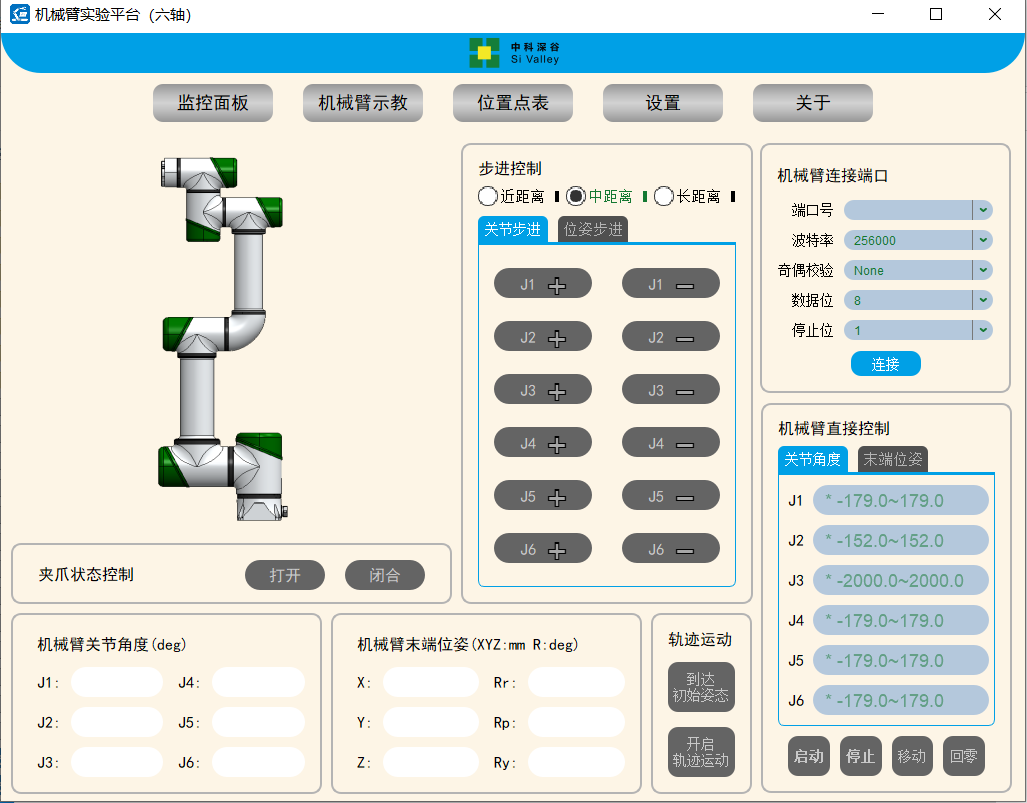
机械臂上位机软件界面
04 项目总结
采用我司的CSAPCE-V3和关节模组,基于深度学习的视觉伺服平台及多年电机驱动控制技术,可快速的协助高校师生搭建科研平台,更好的协助客户进行科研。

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)