
精品课推荐| 基于模型设计开发协作机器人方法与技术
2022-10-17
协作机器人最大的优势在于将机器人的效率与人类的能动性进行有机融合实现人机协作,加快工作完成进度,促进制造企业的发展。
然而国内协作机器人企业虽多,但掌握核心技术,拥有长久技术累积的企业却屈指可数,部分协作机器人企业因技术开发成本高且耗时长,在协作机器人关节开发过程中仍然依赖国外公司进口。
“工业兴则百业兴,工业强则城市强。”协作机器人技术是近年来出现的新型机器人技术,对个人成长、企业提高生产线效率、高校推进产教融合都有着至关重要的作用。深谷学院愿将最前沿的机器人技术、最丰富的开发经验与各位共享,共同培育协作机器人产业发展,为实现智能制造赋能。
基于此,深谷学院研究院重磅推出了人工智能与机器人系列产品开发课程的第三期《基于模型设计开发协作机器人方法与技术》,限时全免费对外开放。课程通过理论教学、问题互动和实际操作演示视频的方式,使学员快速掌握MBD工程方法、协作机器人关键技术和高级控制算法等核心内容。
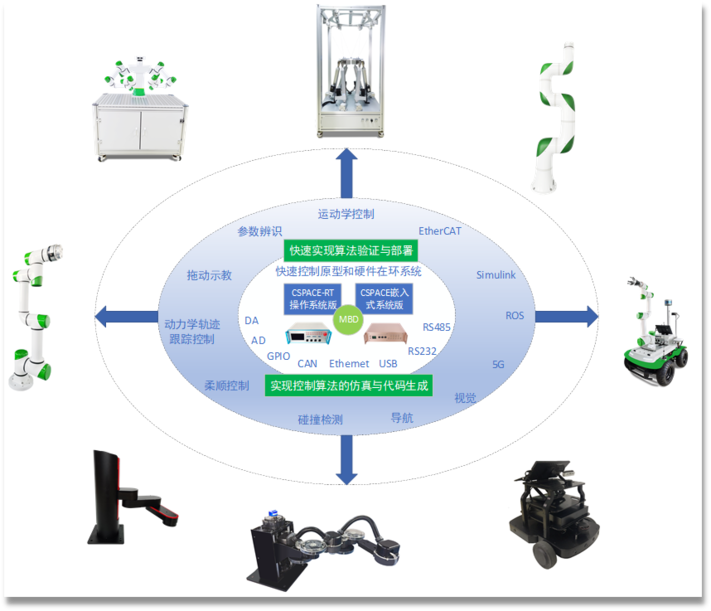
课程及平台介绍
基于模型设计(Model-Based Design,简称MBD)是一种解决复杂控制、信号处理和算法设计验证等工程问题的数学和可视化方法,可广泛应用于如运动控制、工业设备、航空航天、汽车、机器人等不同工程领域的项目开发中。MBD工程方法是一种先进、流行的工程应用开发方法,正在被越来越多的产品开发者接受、喜爱和推广。
开发一个产品,如果用传统的开发方式需要经历项目设计、概念构架、立项、运维、验证等环节,过程繁琐、流程复杂,且时间、人力、物力成本都很高。
MBD基于模型的设计理念打破了原有的产品开发思路,将设计任务从实验室和现场转移到电脑桌面,从而改变工程师和科学家的工作方式。简单地说,可以使产品设计开发“只做一次,一次成功”,将开发时间减少50%以上。
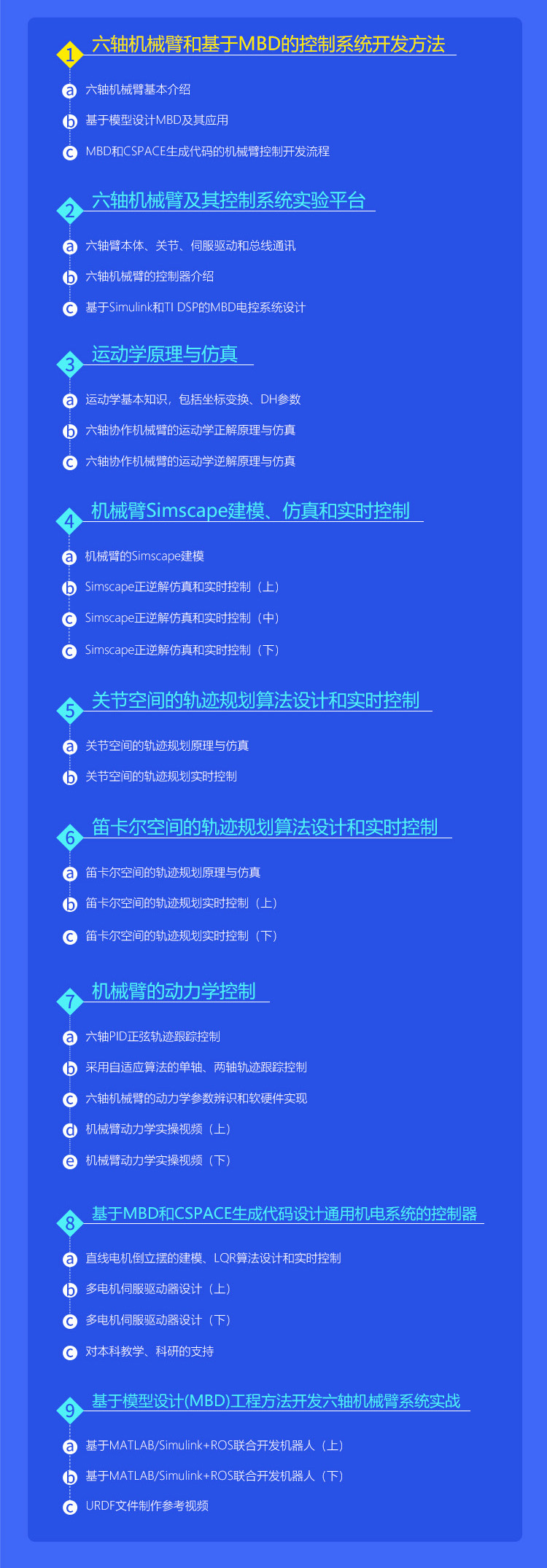
课程内容
适合人群
机器人、控制工程、机械电子、智能制造等专业的全国高校教师、研究生
机器人相关企业技术负责人/工程师
科研院所的科研人员
本课程主要介绍基于模型设计(MBD)开发方法进行协作机器人的开发,介绍如何把Soliworks三维模型导入进Simulink,设计Simulink运动控制算法进行软件仿真,通过自动代码生成进行快速控制原型开发,实现机械臂的运动学和动力学控制,并提炼出较通用的机器人等机电系统的控制器MBD设计方法,系统讲解如何自动代码生成进行实时控制,完整阐述建模、仿真和实时控制的对应关系。
同时,对于六轴机械臂,详细介绍了坐标变换、DH参数、正运动学、逆运动学、关节空间和笛卡尔空间的轨迹规划、带摩擦力和重力补偿的动力学控制、基于零力拖动控制的拖动示教、 PID和自适应控制、基于模型设计(MBD)工程方法的六轴轨迹跟踪、六轴机械臂碰撞检测、动力学参数辨识及其软硬件实现。
对于七轴机械臂,介绍了通过数值法求解七轴臂逆向运动学,并进行关节空间轨迹规划和笛卡尔轨迹规划。
对于双臂机器人,介绍了双臂机器人的运动学仿真、碰撞检测和路径规划。
相信大家通过对本课程的学习,能掌握采用MBD这种世界先进的开发方法和MATLAB/Simulink工具进行电控系统设计,掌握协作机器人的知识、控制系统的设计方法,非常有助于设计串联、并联的机械臂、康复医疗机器人等其它机电设备的电控系统。
本课程的独特之处在于有多位资深科研人员和工程师参与课程研发与讲课,除了提供更专业的课程、在线答疑,同时还提供开源的实验平台,对于想深入研究的学员,可以到深谷学院来做实验并沟通交流。
学习方式
本期课程建议学习时长为3-7天,课程内容十分丰富,能在短时间内让学员高效地掌握六轴协作机械臂、七轴协作机械臂、双臂工作站等平台的开发方法和相关知识。为了保证学员更好地了解协作机器人的相关技术应用,欢迎加入深谷学院学习交流群,与其他老师同学一起交流学习成果,讲师在群内答疑解惑。欢迎通过添加课程助理李老师(LNJzk1008),备注:协作机器人课程加群。
讲师介绍
甄圣超
佐治亚理工学院联合培养博士,合肥工业大学老师,研究生导师, 中科深谷首席专家。参与973子项目一项,863项目二项,安徽省科技攻关一项,江苏省重点研发一项,陆航“十三五”项目一项。主持的项目包括合工大智能院机器人公共平台建设、国家基金、中国博士后面上一等资助、安徽省面上基金等以及机器人相关横向项目十余项。在机器人动力学控制、高级控制算法、基于模型设计(MBD)工程方法和开发平台等研究深入,发表三十余篇SCI论文,出版著作两部,授权发明专利十余项。
陈现敏
教育部全国万名优秀创新创业导师,中国科学技术大学和美国佐治亚理工学院联合培养博士,中科深谷首席技术专家。长期从事嵌入式控制器、伺服电机驱动器、机械臂控制系统及MBD工程开发方法的研究,其主导开发的产品累计市场销售额近亿元。参与发表论文数十篇,参与培养硕士研究生近50名,培养优秀工程师近百名。
鲁大岱
中科深谷资深研发工程师,华中科技大学电气专业研究生学历,拥有多年的协作机器人控制器软硬件开发经验。擅长基于模型设计(MBD)开发方法,精通协作机器人的运动轨迹规划算法设计和开发。
吴平志
中科深谷资深机器人研发工程师,安徽大学研究生学历,带领团队开发CSPACE系统、六轴协作机器人、七轴协作机器人及双臂平台等产品,拥有丰富的工程应用经验。
精彩内容


版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)