
科技引领未来 | CSPACE实时仿真控制系统助力微创医疗机器人精准实施
2022-11-12
当前,微创外科手术机器人正逐渐成为医疗机器人研究中的一个热门研究领域。由于其特殊的机构设计及机器人技术的引入,微创手术机器人可克服传统手动微创手术的运动限制与缺陷,极大地拓展医生的能力,让医生实现对手术仪器前所未有的精准控制,进而充分发挥微创手术的优势。

中科深谷CSPACE实时仿真控制系统助力某医疗器械公司最新研发的腔镜手术机器人开启微创精准诊疗新篇章。
01 背景
作为智能服务机器人的一种,医疗机器人能够辅助医生治疗、拓展医生能力、加速患者康复,并具备低误差、高安全、强适应及良好交互的特点,能给医生和患者带来许多好处,同时也能推动现代医疗的升级发展。目前,作为全新智能医疗设备,机器人已经融入医疗康复、手术、后勤服务等多个领域,催生出包括手术机器人、康复机器人、导诊机器人、运输机器人、陪护机器人、外骨骼机器人等多种产品。
02 痛点
目前,医疗机器人行业已经有微型仿生机器械臂、腔内开放视野的视觉成像技术等多项创新,但很多医疗器械公司在手术机器人核心算法研究以及机器人实时运动控制器开发领域仍欠缺相关经验。中科深谷CSPACE实时仿真控制系统在机器人控制器开发领域拥有丰富的研发经验以及成熟产品,在手术机器人算法研究方向积累了多年的研究经验,开发的控制器全部开源,并提供正逆运动学、关节空间、笛卡尔空间的轨迹规划、臂型角运动控制、重力补偿、零力拖动示教、柔顺控制(阻抗控制)等运动学、动力学算法实验案例。
03 解决方案
中科深谷以客户需求为导向,以技术能力为基础,为客户提供专业详细的定制化解决方案。该方案通过采用CSPACE实时仿真控制系统,针对复杂的九轴手术机器人,构建精确的系统控制模型,搭载有实时内核的运动控制器,总线运动控制周期可达1ms。基于模型设计方法(RCP&HIL)优化改进控制算法,高效解决参数辨识、高精度的正逆运动学求解以及笛卡尔空间轨迹规划、狭小空间的臂型角运动控制等核心技术难点,最大程度实现了用少量的人手快速开发一套安全、实时的设备。同时CSPACE实时仿真控制系统解决方案也让临床中患者手术的安全更能得到保障,手术路径提前得到优化。

腹腔镜手术机器人的驱动器研发的优势
CSPACE实时仿真控制系统采用x86架构,控制器性能强悍,接口丰富,支持EtherCAT通信,采用MBD的工程开发方式,能实现对现有工业控制器的无缝替换,开源系统算法、接口,满足客户实现产品化的需求。
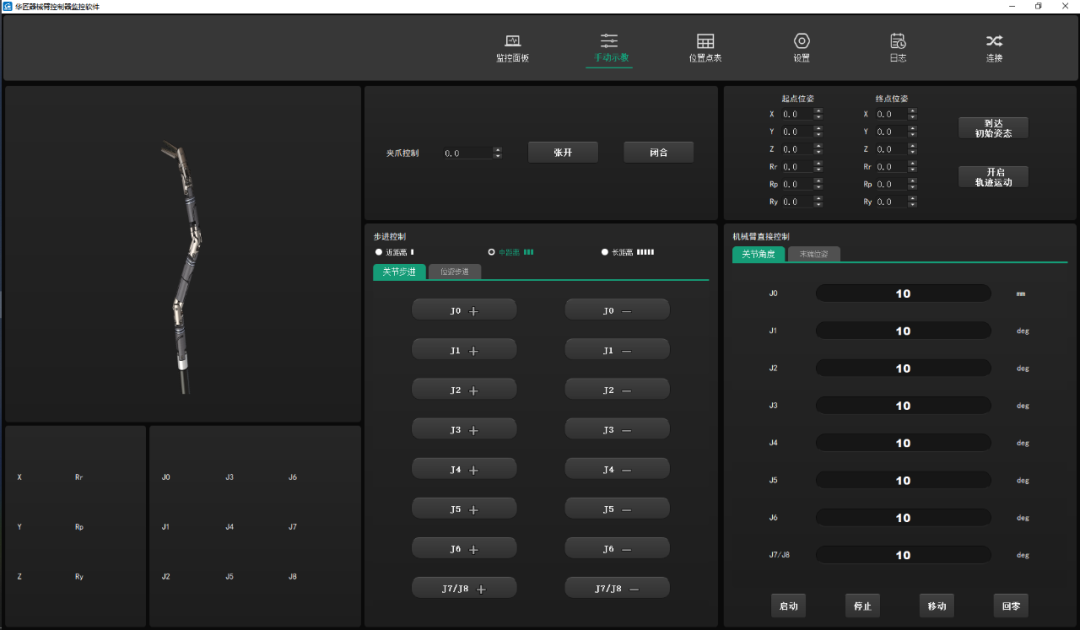
手动示教图
软件部分基于x86架构联合MATLAB/Simulink开发,结合计算机仿真和嵌入式实时控制技术,能实现硬件在环(HIL)和快速控制原型(RCP)设计的功能。
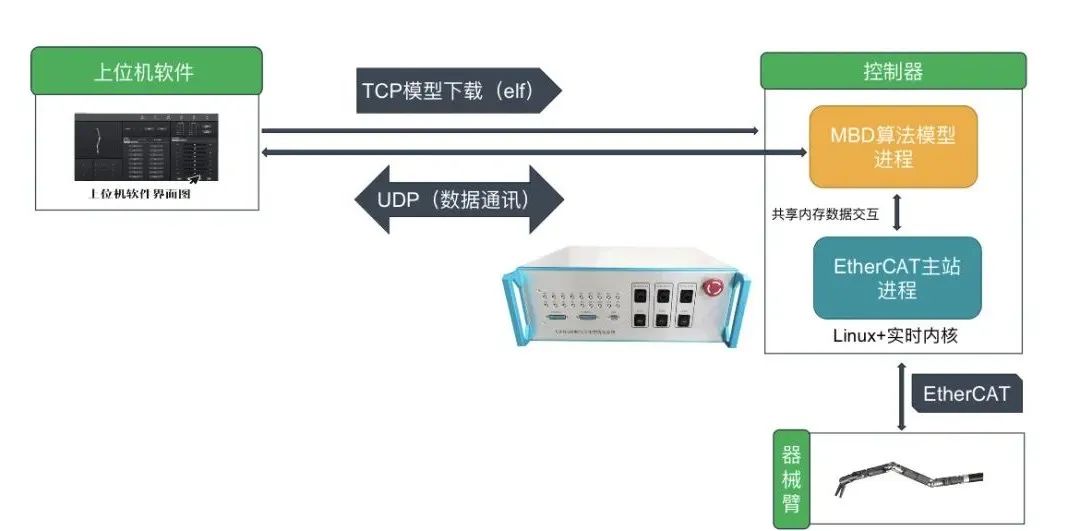
控制器功能架构图
在器械臂的安装与布置中,CSPACE实时仿真控制系统凭借简单、易用、开源的特点再次得到了不少医疗机器人客户企业的认可,CSPACE实时仿真控制系统的拖动示教和示教器交互编程,让腔镜手术机器人集成难度和时间大大减少,降低了开发成本,更快的迭代产品研发。
“手术机器人不是取代医生,而是辅助医生更精准高效地完成手术。”近些年来,手术机器人得到了越来越多的关注,并且随着人们对自身疾病治疗的日趋重视以及对医疗质量要求的增高,手术机器人在未来的医疗服务中必将具有更加广阔的应用前景。而中科深谷CSPACE实时仿真控制系统的出现,将极大加快手术机器人的国产化步伐。未来中科深谷将持续研发创新,为医疗机器人系统研发提供更加高效、专业的工具与技术支撑。

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)