
创新平台 | 打造人工智能与机器人公共服务的创新引擎!人工智能与机器人公共创新服务平台,助力机器人产业发展!
2022-11-16
随着人工智能与机器人应用场景拓容,社会需求增加,产业发展势头迅猛,各类机器人企业为抢抓发展先机,积极开发人工智能与机器人技术不断推出新品;高校和科研院所为掌握前沿科技争先开展人工智能与机器人科研项目攻关。同时各地人工智能与机器人企业扶持政策、产业专项规划也纷纷出炉,力争建立机器人产业集群,实现经济发展模式转变。

对此,全国各个省市在近年来积极布局人工智能与机器人产业发展。高精尖产业聚集地北京尝试打造人工智能与机器人产业生态;国际城市上海引流国内外机器人大企业驻扎聚集打造完整产业链;制造业密集地广州培育超千亿元智能装备产业集群面向周边旺盛需求;先行示范区深圳吸纳新兴热门机器人行业锚定发展前沿;制造之都苏州凭借雄厚经济实力广纳机器人企业……

集聚多所高校专家 发展自身服务社会
作为省级人工智能与机器人综合性创新载体,安徽省人工智能与机器人公共创新服务平台依托合工大智能制造技术研究院集聚了多所知名高校及单位的教授专家和行业资深研发工程师。

平台自成立以来,按照“技术赋能、创新服务”的发展思路,坚持发展自身和服务社会并重,不断优化技术、人才等科技资源,为合作伙伴提供技术支持和动力源泉。目前已在控制与半实物仿真技术、伺服驱动技术、视觉与深度学习技术、导航技术、运动控制技术、智能机器人技术等多方面实现突破创新。
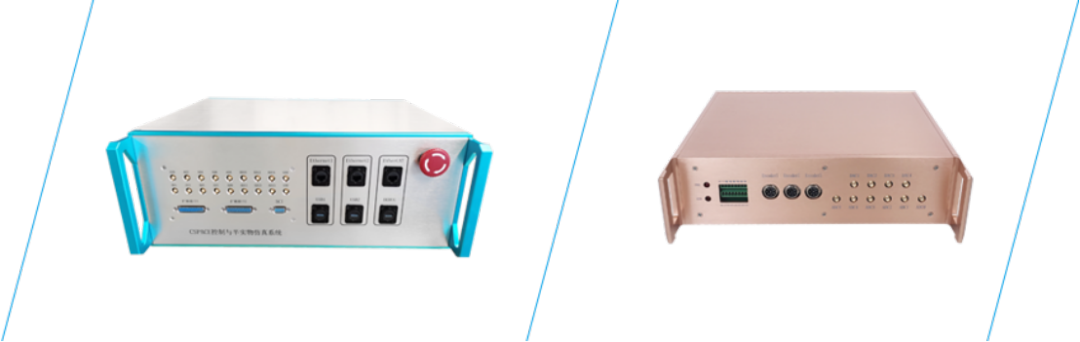
1 、控制与半实物仿真技术
控制与半实物仿真技术是一种实时的嵌入式计算技术,具备丰富的I/O资源来采集外部信号,并运行嵌入式实时系统。根据应用场景的不同,可分为快速控制原型RCP技术和硬件在环HIL技术两部分。
采用基于模型设计的方法,实现了相比于传统开发工作流程的两个重要提升:
1. 将工作流程中大量费时或易出错的步骤(如代码生成)自动化。
2. 从需求捕获到设计、实现和测试,系统模型开发和测试始终占据开发流程的核心。
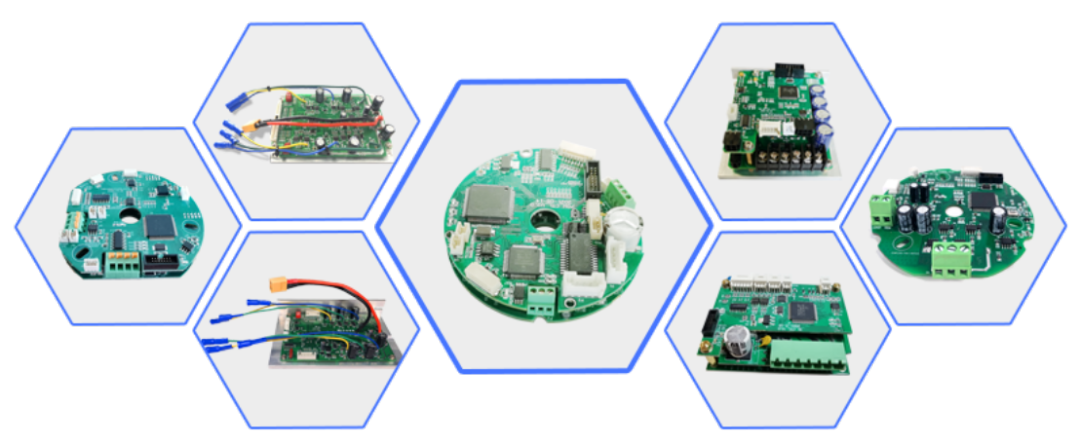
2、伺服驱动技术
伺服驱动主要采用高性能的 DSP或ARM芯片,实现SVPWM、PID、FOC磁场定向控制、电流/速度/位置三闭环控制;可驱动多种电机,支持多种编码器,支持EtherCAT、CANOpen、modbus等多种总线协议;集成了点到点轨迹规划、位置跟踪等功能;具体有过流/过压/欠压/堵转/过温等多种保护功能;实现了参数辨识、PI参数自整定、ADRC自抗扰、负载辨识等高级算法。
3、视觉与深度学习技术
计算机视觉,以传感器获取图像数据,通过深度学习和神经网络算法,提取图像深层特征、识别环境及目标物体,实现移动机器人的视觉导航与机械臂的目标定位等功能,从传统、固定的运动规划提升至机器人自主导航和自主作业,满足复杂场景、移动多目标实时检测、跟踪、定位等需求。
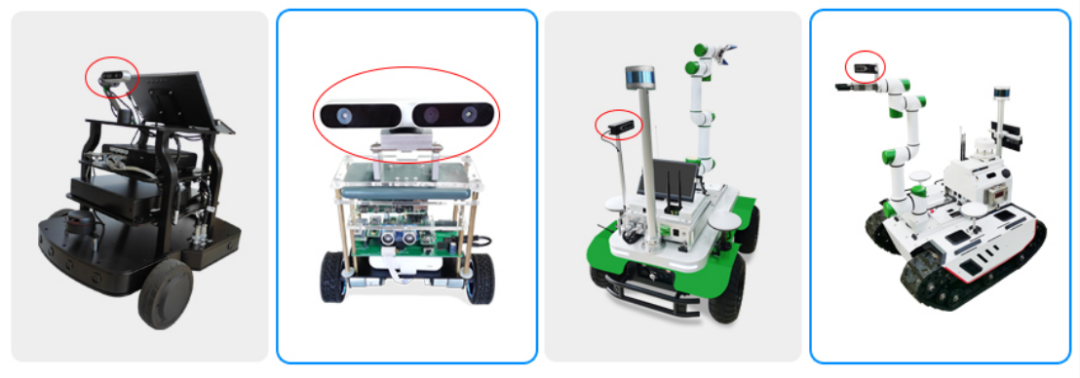
以某省知名农科院为例,公共创新服务平台自主研发的四驱四转采摘机器人在无轨道无外部路标情况下,可以在狭窄农业环境中的作业,具有很强的通过性和自主性,Slam定位下的自主导航技术,以及视觉识别技术,实现了该农科院机器人的控制及抓取,代替人工进行水果采摘,为智能果蔬的无人化生产奠定基础。
4、导航技术
通过将惯性导航的数据(INS)、卫星定位导航的数据、路标定位的数据、地图匹配定位(MM)的数据以及视觉定位的数据做有效的融合;可实现车辆横向/纵向精确定位、障碍物检测与碰撞避让、智能车速控制、路径规划及行为决策等功能。
以某上市电动车公司为例,相较于传统的电动车公共创新服务平台研发的自平衡两轮电动车在稳定性上加装可控制实现高低速旋转的双飞轮和平衡控制检测和控制系统,具有强抗倾倒能力。除此之外还加装了激光雷达、3D视觉、GPS和自动行驶系统,可通过语音控制、远程监控和控制实现手机招车、车找人、自主跟随,增加自由出行能动性。

5、运动控制技术
机器人在笛卡尔空间及关节空间下的连续路径规划,并通过蚁群遗传算法、RRT算法等实现机器人工作空间避障;通过状态空间动量观测器实现机器人在复杂工作场景中的碰撞保护;基于机器视觉与运动规划算法实现复杂场景中实时运动规划与多机械臂协同作业;通过动力学参数辨识获得机器人准确动力学参数构建机器人动力学模型,可实现高速高精度的轨迹跟踪控制;基于六维力传感器与力矩传感器,可通过阻抗/导纳模型实现机器人柔顺控制应用;基于牛顿迭代法实现冗余机械臂运动学控制和冗余零空间导纳控制。
以某航天研究所为例他们在总装生产过程大部分采用手工模式装配,工作量大,劳动强度高,周期长,经常出现碰撞损伤和返工现象,不能满足航天装备总装生产需求。公共创新服务平台结合多年的积累,深入研究从协作机器人的本体结构、伺服驱动器、总线通讯、控制系统、运动学与动力学算法、柔顺控制、3D视觉、融合深度学习算法的3D视觉的开源算法为某航天航空单位实现有人参与以及无人参与的自动化某武器关键核心配件的安装,其中航空航天领域待装配部件还带有定位销,实现精密装配。
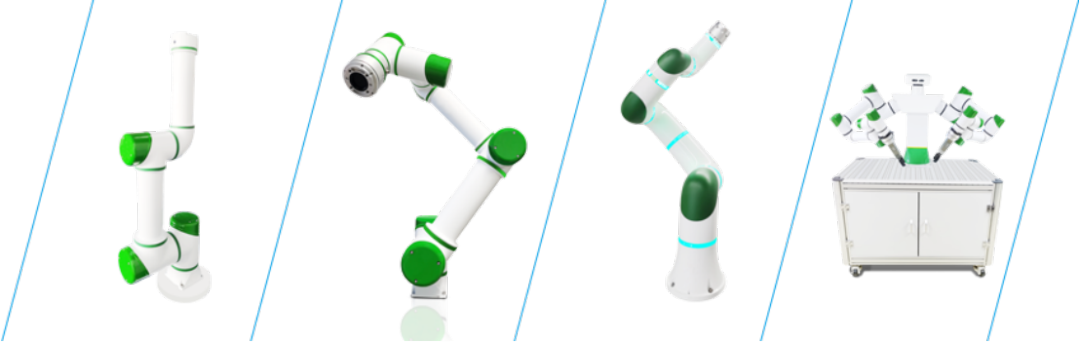
6、机器人集成应用
装备了自主开发的伺服驱动、高负重比、轻量化协作机械臂、智能移动底盘;通过动力学控制、视觉识别与定位、力控制技术、自主定位、智能路径规划、自主避障 远程定位 、和深度学习等技术,具有小巧、安全性好、人机协作和共融、快速部署、使用便捷等特点。基于多年来的伺服电机、伺服驱动、运动控制、运动学和高级动力学、3D视觉、人工智能与工业互联网方面的技术积累,开发了多种协作机器人、移动机器人、移动机械臂视觉作业机器人、特种机器人等产品,并沉淀了众多关键技术。
多措并举探索人才培养新模式
面向当前人工智能、机器人重点领域新型技术人才的稀缺的情况,安徽省人工智能与机器人公共创新服务平台联合华为、讯飞、中科深谷、粤嵌等企业一起探索适应新需求和新变化的优秀工程人才。
1、开源机器人赋能工程人才培养
平台通过深入研究不同层次高校机器人工程、人工智能、智能制造等专业(方向)的人才培养模式和教学规律及特点,开放相关工业产业的核心技术与器件及装备底层开源,融合人才培养和教学规律,形成系列成熟先进的实验装备和专业课程实验教学解决方案。

2、深谷学院—平台化学习打造学习新引擎
公共创新服务平台联合深谷学院打造高品质的免费开放的机器人专属学习平台,联合国内外多名教授、专家学者、资深工程师,提供线上线下专业的机器人、人工智能、智能制造相关课程。线上线下累计学习人次达50万人次。
打造机器人爱好者的开源社区。深谷学院致力于赋能开展人工智能与机器人产业化应用的中高端人才培养,搭建中高级产业人才培养赋能生态,服务中国教育。

3、人工智能与线下培训
近年来,公共创新服务平台举办了多期人工智能与机器人的实战实操式课程培训,采用的融理论与实践于一体的综合一体化高校工程性型人才培养模式,将理论教学、案例教学、项目实训、企业实践等多个内容包含在内,使学生真正理论联系实际,学以致用,有效增强了学生运用知识解决实际问题、应对复杂工程问的解决能力。

国家软件人才国际培训基地
4、中国机器人操作系统(ROS)暑期学校
ROS是世界上最先进、最通用的机器人与人工智能科研和教育平台且ROS机器人在服务业、工业、农业、军事等行业具有广泛的应用,公共创新服务平台举办中国机器人操作系统(ROS)暑期学校全力推动ROS在中国的普及、助力科研和产业落地。

5、嵌入式人才培养
融合嵌入式、物联网、人工智能等新一代信息技术,自主研发行业产品,包含嵌入式工控板、汽车导航和定位终端、智能考勤终端、智能测温终端、娱乐机器人等多款嵌入式人工智能模组,与2000多家企业达成长期稳定的人才合作关系,为超过10000企事业单位输送优秀的嵌入式人才。
截至目前,公共创新服务平台通过“技术赋能,创新服务”已服务多家人工智能与机器人高质量企业。

发挥优势平台效果初显露
公共创新服务平台是根据行业需求,组建行业内顶尖学者及工程师研发机器人产业共性技术,在高校科研院所科技成果转化、初创型企业研发团队孵化、项目合作赋能人工智能与机器人产品开发方面均已有所收获。
高校公共创新服务平台
提供专业共建,教学、科研平台及师资培训、人才培养服务,加快高校科研项目攻关及工程人才培养。
“和公共创新服务平台联合研发的四轮独立驱动四轮独立转向移动机器人,技术达到国内先进水平,满足学校教学、科研需求,为我们学校培养工程技术人才和科研项目领先提供了基础,目前我已通过该机器人申请多个专利。”
——安徽工程大学某知名教授
究所公共创新服务平台
在与研究所合作中,提供专业团队和技术赋能,帮助研究所掌握核心技术并培养出技术团队。
“以往国内核心驱动器大多依赖国外进口,产品成本和价格使得我们这些研究所和中小企业叫苦不迭,近几年通过公共服务创新平台的技术团队合作研发的伺服驱动器已基本实现国产替代,目前我们的驱动器被广泛应用在各种厂家多种规格型号的电机上,性能指标处于国内领先、部分产品指标国际领先。”
——安徽**智能科技有限公司

初创企业公共创新服务平台
在与上市企业的合作中,协助进行上游核心零部件的核心技术自主化开发,协助建立研发体系,加快新产品开发速度,扩大机器人市场占有率、增加收入。
“当我们准备从事腹腔镜手术机器人的研究时,发现缺乏机械臂用的伺服电机驱动器技术、EtherCAT运动控制器技术,公共创新服务平台提供了开源的伺服电机驱动器和EtherCAT机械臂控制器,帮助我们搭建好第一台功能样机,使我们的研发团队此次合作中,快速掌握相关技术,增加了项目实战经验。” ——杭州**医学机器人有限公司
上市企业公共创新服务平台
在与上市企业的合作中,协助进行上游核心零部件的核心技术自主化开发,协助建立研发体系,加快新产品开发速度,扩大机器人市场占有率、增加收入。
“我们目前已有的工业机器人等产品在国内具有很强的核心竞争力,年销售额数亿元,但在协作机器人新产品开发中尚无核心技术,于去年底委托公共服务创新平台开发两款机型的伺服驱动器,在开发过程中,平台其设计好对应功率和功能需求的开源EtherCAT伺服驱动器,功能强大、技术先进,将漫长研发周期缩短至数月。”
——东莞***机器人股份有限公司
项目申报公共创新服务平台
平台依托多年前沿技术沉淀,拥有经验丰富的技术支持团队,可与客户联合申报项目,申请科研经费,进行研发项目攻关。目前已和江苏高科、申洲针织(安徽)、中科大、合动智能、中科深谷等,联合申请成功省重点研发项目、揭榜挂帅项目等多个省部级科技项目。

截至目前,作为科技创新服务模式探索与实践的先行者,安徽省人工智能与机器人公共创新服务平台已累计以机器人技术赋能100多家企业和1000余产品项目。
立足安徽,面向全国,安徽省机器人公共创新平台目前已经在产业上做了很深的沉淀,并非常乐意将已有的产业技术分享出来助力产教融合以及人工智能与机器人企业发展。
未来,安徽省人工智能与机器人公共创新服务平台也将致力于提供更多的创新技术和国际先进理念,不断洞悉国内外人工智能与机器人新技术动态。

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)