
华中科技大学教授杨文玉 | 机器人运动学中的几何与代数问题
2022-11-22
机器人运动学包括正向运动学和逆向运动学,正向运动学即给定机器人各关节变量,计算机器人末端的位置姿态;逆向运动学即已知机器人末端的位置姿态,计算机器人对应位置的全部关节变量。一般正向运动学的解是唯一和容易获得的,而逆向运动学往往有多个解而且分析更为复杂。机器人逆运动分析是运动规划不控制中的重要问题,但由于机器人逆运动问题的复杂性和多样性,无 法建立通用的解析算法。逆运动学问题实际上是一个非线性超越方程组的求解问题,其中包括解的存在性、唯一性及求解的方法等一系列复杂问题。
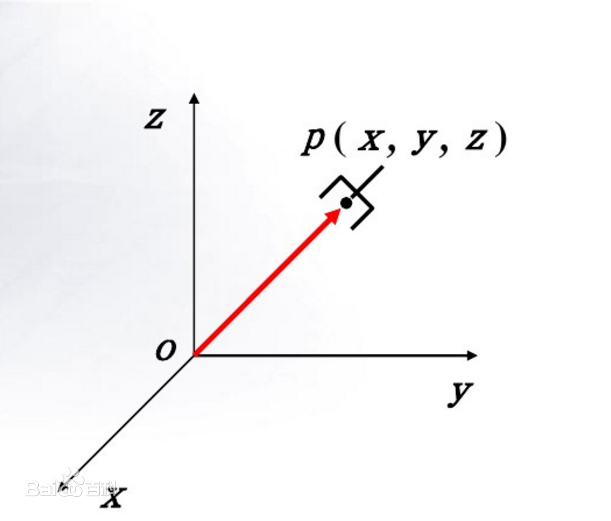
机器人的位姿主要是指机器人手部在空间的位置和姿态,有时也会用到其他各个活动杆件在空间的位置和姿态。位置可以用一个位置矩阵来描述。姿态可以用坐标系三个坐标轴两两夹角的余弦值组成的姿态矩阵来表示。
机器人的坐标系包括手部坐标系,机座坐标系,杆件坐标系,绝对坐标系。
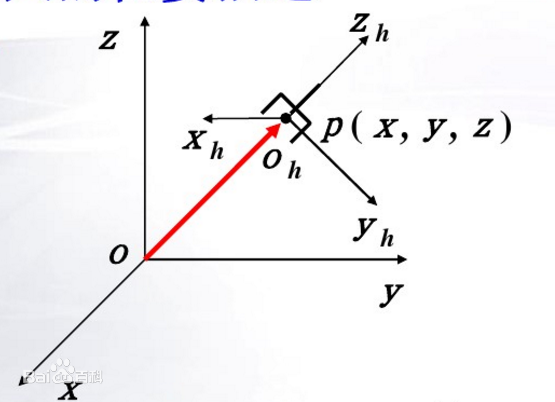
01、手部坐标系
参考机器人手部的坐标系,也称机器人位姿坐标系,它表示机器人手部在指定坐标系中的位置和姿态。
02、机座坐标系
参考机器人基座的坐标系,它是机器人各活动杆件和手部的公共参考坐标系。
03、杆件坐标系
参考机器人杆件的坐标系,它是在机器人每个活动杆上固定的坐标系,随杆件的运动而运动。
04、绝对坐标系
参考工作现场地面的坐标系,它是机器人所有构件的公共参考坐标系。
手部坐标系{h};机座坐标式{0};杆件坐标系{i}(i-1,2,...n);绝对坐标系{B}。
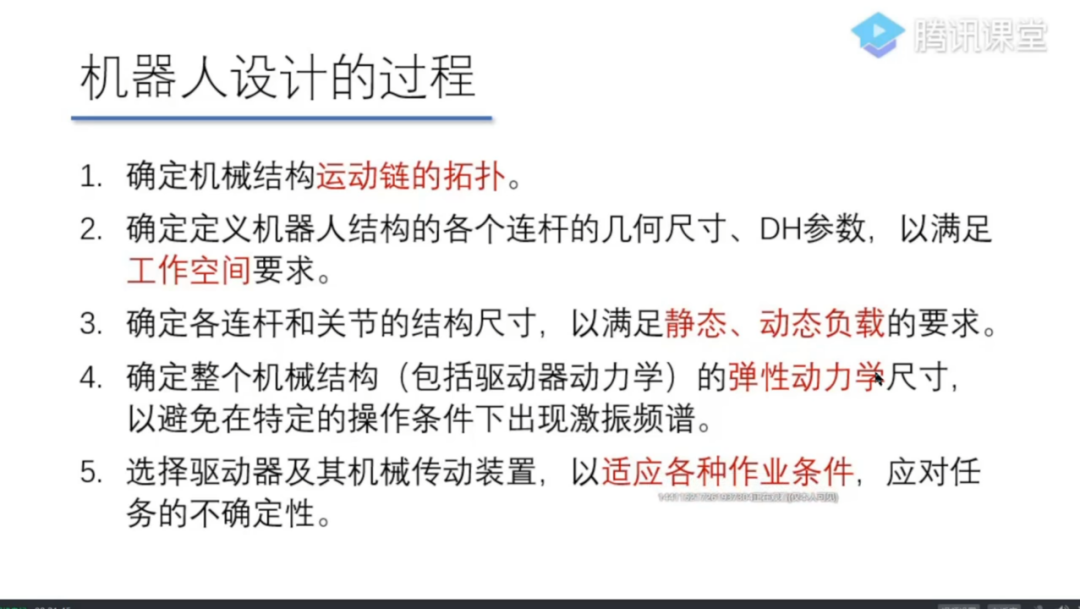
机器人设计的过程
01、确定机械机构运动链的拓扑;
02、确定定义机器人结构的各个连杆的几何尺寸、DH参数,以满足工作空间要求;
03、确定各连杆和关节的结构尺寸,以满足静态、动态负载的要求;
04、确定整个机械机构(包括驱动器动力学)的弹性动力学尺寸,以避免在特定的操作条件下出现激振频谱;
05、选择驱动器及其机械传动装置,以适应各种作业条件,应对任务的不确定性。
想要做好机器人,第一步就是要首先建立模型,数学意义上的建模及仿真,实际上是指对机器人进行运动学模型和动力学模型的构建。
运动学模型是描述控制对象的目标运动和每个驱动单元运动之间的关系,在控制过程中反复调用,正如坐标变换,运动学模型给了我们末端执行器或者其他坐标系相对于机器人的躯干坐标系等之间的关系,方便进行运动正逆结算,可以直接通过对于末端轨迹进行规划,通过运动学模型得到各位置移动轨迹。动力学模型是描述被控对象的运动和驱动单元输入力或力矩的关系。确定运动指标的上限以及指导进行器件选型。有了机器人各部分的运动情况,想要实现对于机器人的控制,就需要通过动力学模型完成从运动位移角度到力学角度,即各关节力矩的转换,从而实现控制。
建立运动学模型的方法
01、刚体运动学方法
针对于刚体系统,也就是把物体在力作用下的变形忽略,简化问题,利用达朗贝尔-拉格朗日原理进行数学建模,计算相对较为复杂;
02、多体系统
更多用于分析复杂机械系统,容易实现计算机的自动编程,更加规范化、程式化,在多体复杂系统中占有重要地位
03、机构学建模法
从机构学出发,将机器人进行层层分解,拆分复杂杆组,利用图论等原理将子系统、机构之间的关系转化为矩阵练习,确定机体自由与冗余情况,其中最著名的就是齐次坐标矩阵法。
04、DH模型方法
DH模型法利用齐次变换矩阵描述相邻连杆空间关系,通过层层变换,实现从基坐标系到末端执行器坐标系的等价齐次变换矩阵,即运动学方程。把机器人操作臂看做一系列连杆通过移动和旋转关节串联而成,研究各连杆间运动位移、速度、加速度关系。主要有点有:概念更加清晰,在规定好各连杆坐标系、确定连杆参数后有着更加简单、直观的模型推导过程,并且容易在matlab中进行仿真;指数积方法则虽然不需要规定各连杆坐标系,只需要规定各关节矢量,但是计算量更大;对于四元数来说,则显得没有那么直观,理解相对困难。
建立动力学模型的方法
01、牛顿-欧拉方法
通过达朗贝尔原理和运动坐标系的概念建立相应方程,将刚体的运动主要分为平动和转动,对于质心乃至整个刚体的平动方面采用牛顿方程,应用动量定理,得出质心平动运动方程;对于转动方面使用欧拉方程,应用动量矩定理决定主力矩。严格遵守达朗贝尔定理,对于每个杆件的运动都考虑外部驱动和惯性力两部分,以二者的代数和为零作为基本条件,实现精确计算。这种方法计算速度很快,能够有效过滤冗余信息,是较为常用的方法之一。
02、拉格朗日动力学方法
一种基于能量平衡的方法,在处理简单系统时比牛顿-欧拉方法会复杂很多,但是随着系统复杂性增加,会相对更加简单。它主要通过设定广义坐标,描述机器人受力情况,不需要求解复杂的内部作用力,通过能量对于时间和对应变量的微分结果建立方程,更加直观清晰。
今天深谷小助继续给大家推荐分享华中科技大学杨文玉教授的机器人运动学的专栏课程【机器人运动学中的几何与代数问题】。内容涵盖:机器人、结构设计、机器人总体设计、数学模型搭建、机器人控制,基于复杂运动学的机器人控制方案。
精彩呈现
如果你也对机器人感兴趣,
如果你想了解机器人建模与控制的知识,
点击阅读原文和深谷小助一起学习吧!

杨文玉
华中科技大学教授,博导
多项国家973计划课题、国家04重大专项课题负责人。“高档数控机床与基础制造装备” 国家重大科技专项、航天八院委托研发项目。熊有伦院士 《机器人学》课程团队负责人。讲授本科生 《机器人学》、研究生《机器人操作系统》课程。
课纲简介
· 机器人结构设计
· 机器人总体设计
· 数学模型搭建
· 机器人控制
· 基于复杂运动学的机器人控制方案
深谷学院是高品质的免费开放的人工智能与机器人专属学习平台,联合国内外多名教授、专家学者、资深工程师,提供线上线下专业的机器人、人工智能、智能制造相关课程。线上线下累计学习人次达50万人次。
深谷学院致力于赋能开展人工智能与机器人产业化应用的中高端人才培养,搭建中高级产业人才培养赋能生态,服务中国教育。

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)