
科技造就未来 | 下肢康复外骨骼机器人重新定义医疗康复行业
2022-11-26
近年来,随着科学技术水平的不断提高,机器人的发展趋势已经从单纯的接收指令逐渐演变为能够实现人机交互的智能机器人,而外骨骼机器人就是这样的一种能够实现人机交互系统的机器人。外骨骼机器人将人体的意图和系统的智能结合起来,并通过助力支撑增强人体的运动能力,以完成一系列的单独靠人体或者机器难以完成的任务。因此,外骨骼机器人成为近年来国内外机器人领域主要的研究热点之一。越新颖的领域意味着越多的商业机会。

01、背景
随着老龄化社会进程的加速和国民医疗保健意识的提高,我国康复市场需求持续上升,然而,康复专业人才队伍的缺失成为制约我国康复行业发展的主要因素。要推动行业发展,只能通过引入先进的技术,研发更具优势的医疗产品,以从供给侧弥补行业专业人员的缺失。其中,外骨骼机器人技术可直接作用于人体,通过人机步态交互满足急性康复期和亚急性康复期患者最迫切的康复需求,大幅度提高康复医师工作效率和康复治疗效果,从而弥补行业供给侧缺失并推动行业发展。而康复机器人作为康复工程的产物,能够通过机器引导肢体做各种指定的重复性康复训练,辅助患肢恢复其运动机能,近年来其得到了迅速发展。
02、痛点
与服务机器人、教育机器人等不同的是,外骨骼机器人需要与人体接触,通过传感器收集人体意图,进行机械反馈,而如何准确获得人体的意图,也正是外骨骼机器人研发的难点,而中科深谷CSPACE实时仿真控制系统在机器人控制器开发领域拥有丰富的研发经验以及成熟产品,在外骨骼机器人算法研究方向积累了多年的研究经验,对行业痛点有深刻认识与研究。
03、解决方案
中科深谷以客户需求为导向,以技术能力为基础,为安徽某高校提供专业详细的定制化解决方案。该方案通过采用CSPACE实时仿真控制系统,针对于下肢康复外骨骼机器人,构建精确的系统控制模型,该系统由仿生机械腿、动力源与驱动器、多个传感器以及控制器四个主要部分组成。在其开发过程中突破了人体下肢运动生物力学、外骨骼机构运动学及动力学、运动状态检测及人体运动意图识别、运动规划、驱动系统控制等关键技术。下肢康复外骨骼机器人的研发全过程都是基于模型的设计方法开发,控制系统全部开源,提供PTP运动、人体步态规划运动、柔顺控制等运动学、动力学算法实验案例。
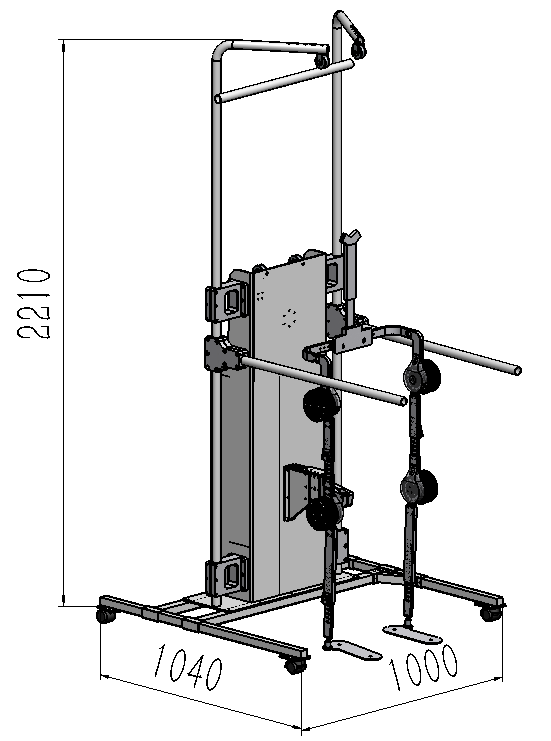
图 | Solidworks三维建模
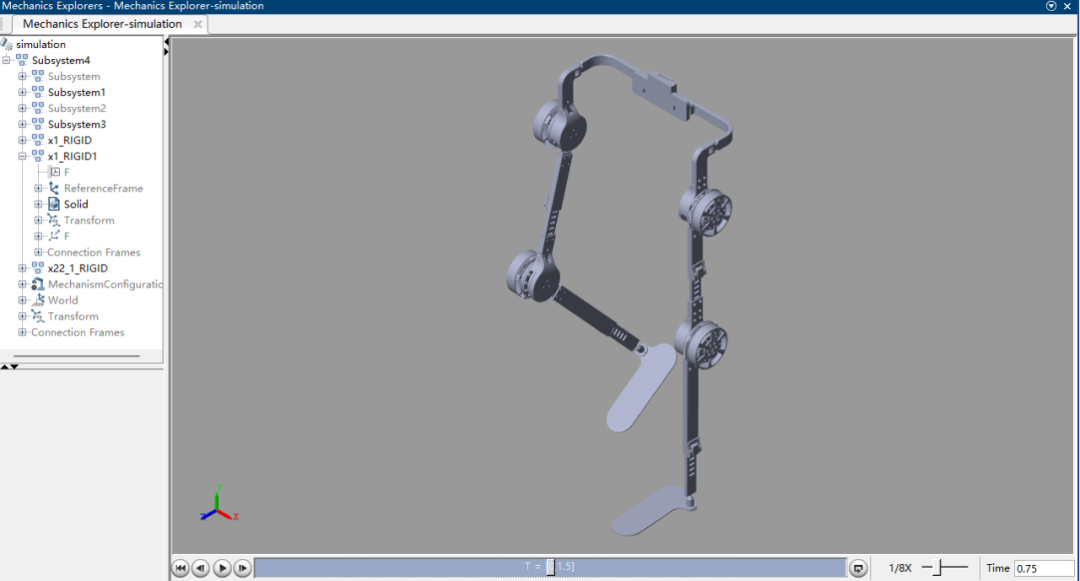
图 | Simscape物理联合仿真
下肢康复外骨骼机器人特点和优势
01、下肢康复外骨骼机器人能够提供长期、稳定地重复性高强度康复训练,并精确检测和反馈训练患者的运动信息实时进行控制。该项目是搭建多传感器信息获取的平台,获取多传感器信息为控制决策和反馈提供所需的数据。
02、为了研究柔自然行走可穿戴机器人的控制策略,针对人体在自然步行运动过程中关节角度变化等关键信息的获取进行了研究,构建了自然行走可穿戴机器人的多传感起信息采集与处理系统,并对采集到的多传感器信息进行分析与处理,为控制决策和反馈提供数据。
03、整个多传器信息获取平台以工控机和数据采集卡为核心,通过对比选取多种传感器、设计传感器的信号调理电路和供电电路来构建采集系统。上位机采用QT作为软件编写平台,对信号进行采集和处理。通过对实验数据的分析得出自然行走时脚底压力的变化信息作为可穿戴康复机器人的控制依据。
下肢康复外骨骼机器人柔顺控制
柔顺分为主动柔顺和被动柔顺两类。机器人凭借一些辅助的柔顺机构,使其在与环境接触时能够对外部作用力产生自然顺从,称为被动柔顺;机器人利用力的反馈信息采用一定的控制策略去主动控制作用力,称为主动柔顺性。本研究的下肢康复外骨骼机器人具有主动柔顺控制功能,采用主动柔顺控制中的导纳控制。
下肢康复外骨骼机器人所采用导纳控制的基本思想是:控制系统采用基于位置控制的内环和力控控制的外环策略。检测系统(关节力矩传感器)与外界的接触力矩,通过一个二阶导纳模型,生成一个附加的位置,此附加位置再去修正预先设定的位置轨迹(期望位置),最终送入位置控制内环,完成最终的位置控制。这种控制方式可以使得系统表现出二阶质量弹簧阻尼系统的阻抗特性,导纳控制计算的结果是关节期望位置。
这种控制方式可以使得系统表现出二阶质量弹簧阻尼系统的阻抗特性,导纳控制计算的结果是关节期望位置。
外骨骼机器人的关节力矩传感器在检测到人施加的力矩时,产生顺应性,当力矩撤销时,在算法的作用下,会自动回到设定的初始位置。患者通过主动柔顺训练,能够锻炼腿部肌肉,从而实现康复训练的目的。
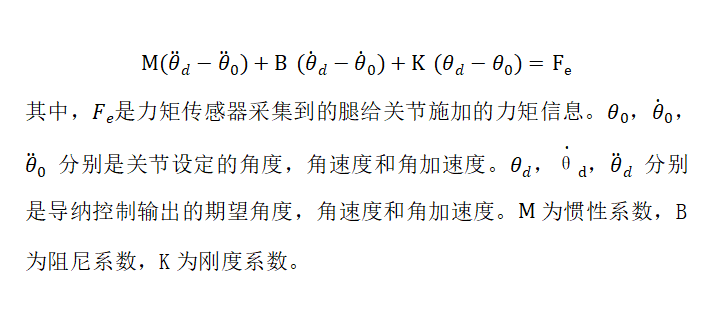
导纳模型
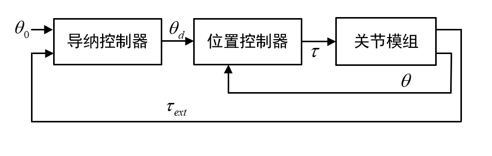
图 | 柔顺(导纳)控制框图
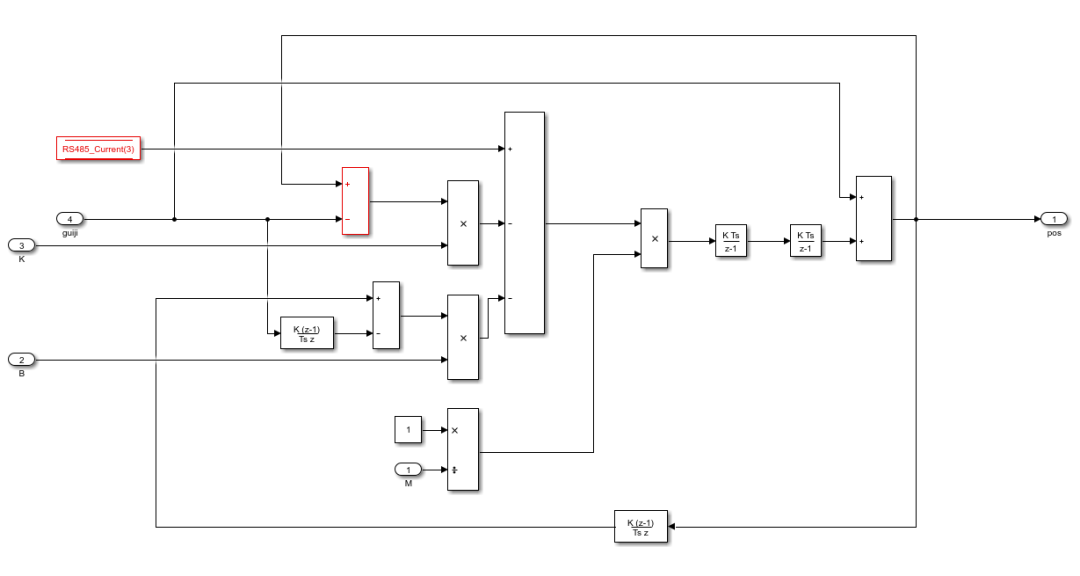
图 | 关机模组柔顺(导纳)控制的simulink模型截图
基于目前下肢康复外骨骼机器人的研究状况
主要解决以下几个技术难点
01、外骨骼结构的人机工程设计。下肢康复机器人的外骨骼装置是穿戴于患者躯体并带动患者下肢作康复训练的,外骨骼的结构尺寸应与穿戴者的下肢尺寸相符合;外骨骼的结构自由度应与人体下肢的运动相匹配;外骨骼结构的运动范围应与人体下肢的运动范围相统一。另外,还考虑了外骨骼结构因为人体肌肉变形而引起的不匹配问题。
02、腰部运动的机构设计。目前下肢康复机器人的研究多集中于腿部的外骨骼结构设计,腰部装置只是简单的穿戴结构,没有考虑人体步行时骨盆和腰部的运动。少数科研机构己经研究了人体步行时骨盆和腰部的运动规律,但是还没有设计出具体的腰部机构来模拟腰部的运动特点。
03、多传感器信息获取系统是本项目的研究重点之一,主要的信号有腿杆姿态信号、关节角信息和关节力矩传感器采集到的力矩信息。多传感器信息获取系统设计主要是为控制系统提供信号,检测可穿戴机器人的运动状态,结合角度传感器、加速度计和一维力传感器做位置、速度和助力的反馈信号,为可穿戴助力康复设备的运动控制提供感知信息基础。在可穿戴康复设备的外骨骼的每个连杆上安装姿态传感器,确定外骨骼整体姿态。在关节上安装绝对值编码器,判定执行机构关节当前的空间位置。在每个连杆机构上安装力矩传感器,用来测量助力效果及反馈助力大小,也可为医疗康复训练康复的效果评价的依据。
04、符合不同康复训练要求的多运动模式。不同下肢患者所需要康复的关节部位不同,同一个患者在康复治疗不同阶段所需要进行的康复训练也不相同。下肢康复机器人的外骨骼结构能够满足人体下肢的全自由度康复训练,且针对于下肢患者在不同康复阶段的训练要求有相对应的康复训练模式。
05、外骨骼系统的重力支持。下肢康复机器人的外骨骼装置是一个完整的机械系统,具有一定的质量。下肢患者支撑自身的重力已经很费力,不能负担外骨骼系统的重量。外骨骼结构在足部装置的设计要能通过机械结构承担外骨骼系统的重力,减轻患者的负担并为患者提供支撑和康复作用。
06、驱动系统和动力源的选择。外骨骼系统穿戴于人体,受重为负担影响要求驱动装置体积小、重量轻。要根据各驱动系统的特点合理地选择下肢康复机器人的驱动装置来提供康复训练所需求的驱动为或驱动力矩。下肢康复机器人属于移动式机器人,对动力源的选择也要满足其运动的要求和特点。
07、要实现柔性外骨骼设备的可移动性,整个系统需要有自给的能源供给,因此要求体积小、重量轻、效率高、清洁环保的新型配套能源技术。
08、快速的信息传感技术,获取所需的控制信息,并对多信息进行高效快速的融合,作出控制指令,实现整个柔性外骨骼的柔顺控制。
09、人机接合接口技术,实现操作者和外骨骼之间的数据和信息双向传递,在感知层和执行层分别实现人和机器的统一。
10、基于“人机一体化”思想的控制策略研究,研究人的智慧在整个控制系统中的作用,充分考虑人在整个控制环中的影响,建立全新的人机智能系统控制理论。
11、建立人与外骨骼之间任务的合理分配规则研究,根据人和外骨骼各自的优势,进行任务分配。因此,外骨骼系统的实现与机器人技术、机电工程、微能源技术、微驱动技术、材料技术和控制技术等学科的发展密切相关。
当下外骨骼机器人快速发展正在改变整个康复行业,尤其是下肢康复外骨骼机器人近年发展迅猛。下肢康复外骨骼机器人智能化水平较高,凭借其优势与特性,将康复治疗标准化,可以为基层和社区的康复服务赋能,实现医疗资源的有效覆盖。外骨骼机器人在未来的医疗康复行业中必将具有更加广阔的应用前景。而中科深谷下肢康复外骨骼机器人的出现,加快了外骨骼机器人转型的步伐。未来中科深谷将持续研发创新,为外骨骼机器人系统研发提供更加高效、专业的工具与技术支撑。

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)