
CSPACE重新定义实时仿真控制系统 | 研发快人一步,释放人工智能与机器人新动能!
2022-12-10
随着人工智能、物联网(IoT)、大数据等新一代信息技术的快速发展,机器人产业也将迎来新一轮融合创新发展浪潮。与人工智能技术、先进制造技术和移动互联网技术融合发展形成的智能机器人,正掀起人类社会生产生活方式变革。
在新一代信息技术的助力下,四足机器人实现自主巡检作业、果园自主采摘有了智能农业采摘机器人、外骨骼机器人实现助力优化患者复健、建筑机器人实现自主铺设地砖、手术机器人实现术前路径优化……
不同种类的智能机器人在新一代信息技术的助力下,在越来越多领域发挥重要作用。其中,在研发这类智能化装备时,“仿真控制技术”是重要的一个技术关键点。它在实现机器人智能化过程中作用显著、应用颇多,已成为机器人等研发产品软实力的重要指标。产业、资本、以及科研院所纷纷对此表现出高度重视。
本文以合肥中科深谷科技有限公司(以下简称中科深谷)自主研发的高性能CSPACE实时仿真控制系统为例,简单介绍了其在康养、工业、农业、民生及教育多个领域的应用情况。
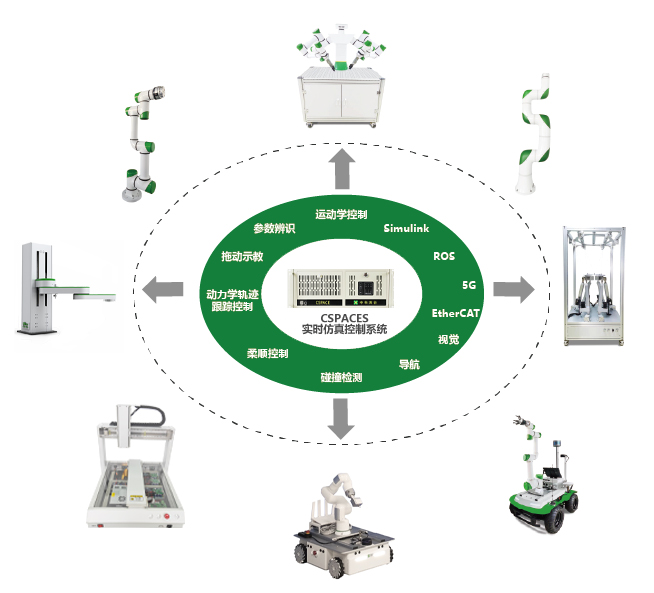
何为CSPACE实时仿真控制系统?CSPACE实时仿真控制系统是中科深谷推出的一套半实物仿真与控制系统,具有快速控制原型(RCP)与硬件在环仿真(HIL)两大功能。
机器人控制器是一个复杂的控制系统,中科深谷突破实时操作系统、基于模型设计的机器人实时仿真与控制、高精度轨迹跟踪与动态轨迹规划等核心技术,基于CSPACE开发出一套实时机器人控制器,具有实时、高效、开源等特点,为企业工程师研发产品提供有力支撑,助推产业发展。
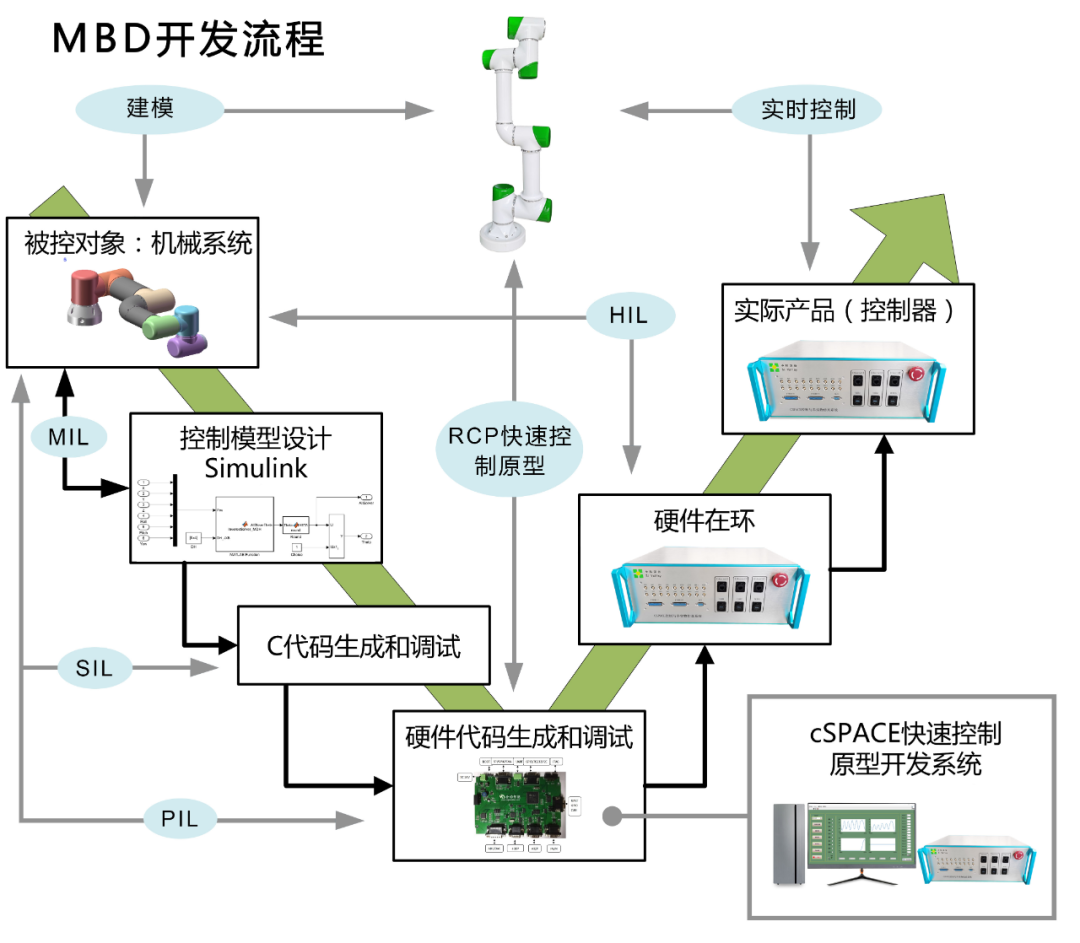
中科深谷的CSPACE实时仿真控制系统采用了一种基于模型设计的方法,将仿真建模与实际研发产品结合,引入高可靠性的实时软硬件环境做技术保障,提供快速原型控制(RCP)与硬件在环回路(HIL)全套解决方案。该方案针对不同的应用场景,提供多种类型实时仿真机,减少了实际的多场景开发成本,CSPACE实时仿真控制系统作为中科深谷自主创新研发的核心产品性能指标更是直接对标国际一线品牌的国产化替代,在新能源汽车、机器人与智能制造、康养智能装备、农业智能装备、科研与教育领域有丰富的经验积累,为用户提供了专业解决方案和优质服务。


中科深谷对机器人大讲堂介绍,基于模型设计的开发方法可以彻底改变传统的开发方法,在系统开发的初期阶段就引入可靠性高的实时软/硬件环境做技术保障,并贯穿于整个系统研发过程中,满足现代控制系统和电子系统高效、精确、快速的设计要求,从而最大限度减少样机系统试制次数,提高设计和开发效率。
目前,中科深谷已经率先在业界落地了“基于模型设计”的开发模式,正期待更多开发者的共同参与。
具体来看,CSPACE实时仿真控制系统相较传统开发,特征优势主要体现在五个方面。
1、高性能实时仿真机。
基于x86高性能处理器与实时操作系统,为多任务处理提供实时组件化服务。
2、监控测试管理软件CS-LAB。
实现了实时仿真软件平台,将CS-LAB与MATLAB/Simulink集成,具备友好的人机交互界面,同时灵活性高、可扩展性强。
包含AD、DA、数字量I/O、计数器/计时器等,通道数量可选,板卡类型丰富,提供高速精确信号采集接口。
数据采集卡、工业总线运动控制卡
4、支持丰富的工业实时工业以太网和现场总线。支持CAN、CANopen、Modbus、EtherCAT、Ethernet/IP等,Profibus、Profinet、CC-Link等会陆续推出,具备强大的互通互联能力。

5、提供详细的解决方案与应用案例。以客户需求为导向,以技术能力为基础,提供专业详细的定制化解决方案。包括但不限于自主开发协作臂、并联机器人、四驱四转移动机器人、手术机器人、外骨骼机器人、助力机器人、自平衡智能电动车等开发案例,并提供相应的软件算法包。
在此基础上,我们看到CSPACE实时仿真控制系统在各个领域都有着不错的表现。
下肢康复外骨骼机器人CSPACE实时仿真控制系统重新定义医疗康复行业
与服务机器人、教育机器人等不同的是,外骨骼机器人需要与人体接触,通过传感器收集人体意图,进行机械反馈,而如何准确获得人体的意图,也正是外骨骼机器人研发的难点。
而中科深谷CSPACE实时仿真控制系统以客户需求为导向,以技术能力为基础,为安徽某高校提供专业详细的定制化解决方案。
该方案通过采用CSPACE实时仿真控制系统,针对于下肢康复外骨骼机器人,构建精确的系统控制模型,该系统由仿生机械腿、动力源与驱动器、多个传感器以及控制器四个主要部分组成。
在其开发过程中突破了人体下肢运动生物力学、外骨骼机构运动学及动力学、运动状态检测及人体运动意图识别、运动规划、驱动系统控制等关键技术。下肢康复外骨骼机器人的研发全过程都是基于模型的设计方法开发,控制系统全部开源,提供PTP运动、人体步态规划运动、柔顺控制等运动学、动力学算法实验案例。
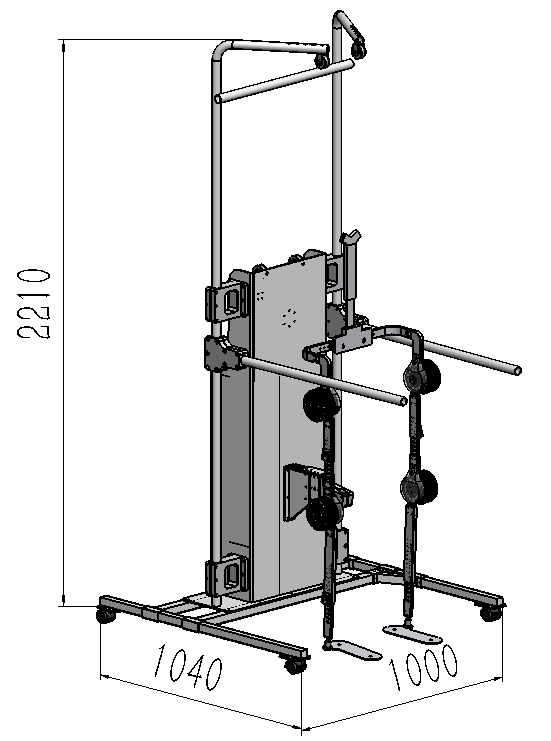
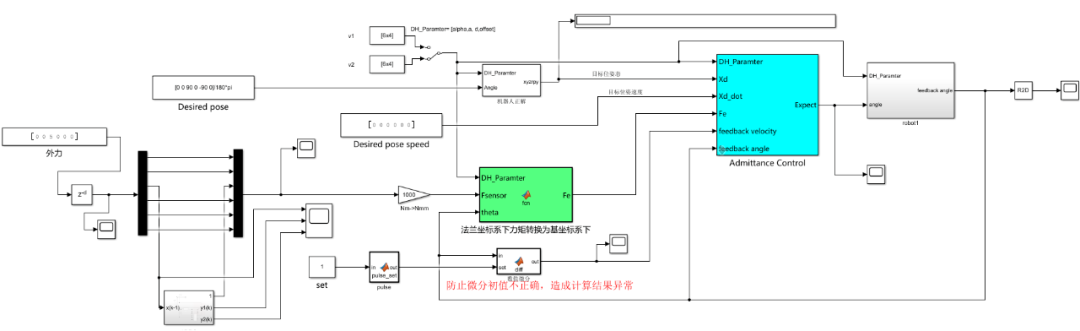
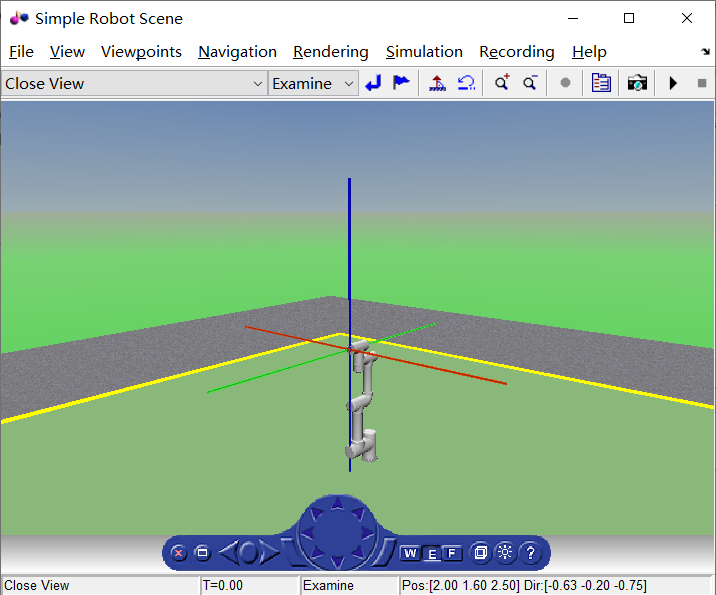
图 | Solidworks三维建模
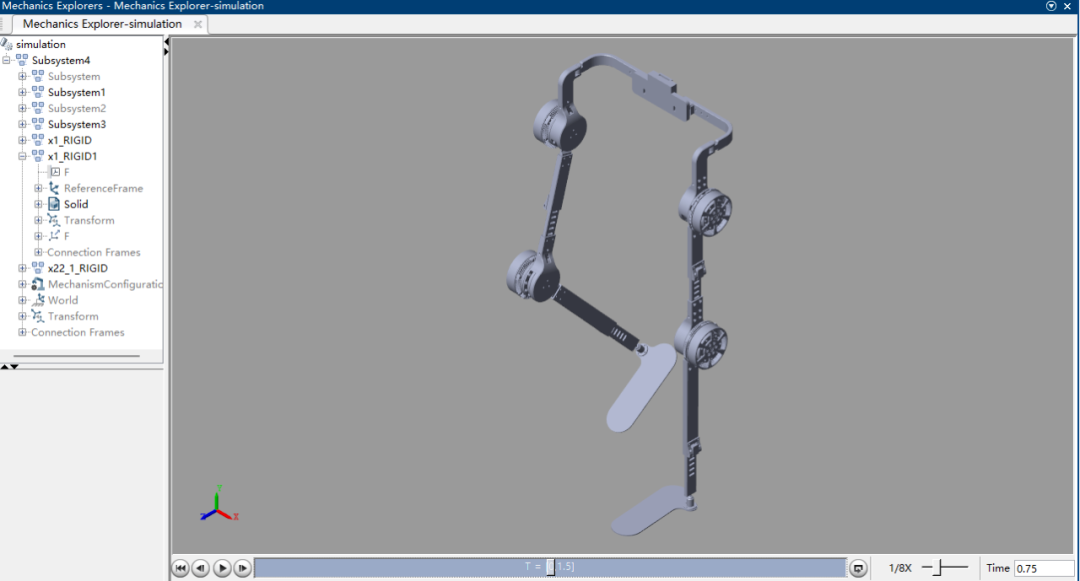
物理联合仿真
工业领域创新实践痛点难点多
CSPACE实时仿真控制系统助力工业制造智能化
工业领域涵盖的范围较广,这里我们选取了中科深谷开发的建筑机器人以及煤矿机器人细分领域案例。

01、智能机器人协作铺砖系统
目前,建筑机器人可以在场外进行预先构建和预先生产,模块化建筑取得迅速发展,但很多建筑公司、建筑高校在建筑机器人核心算法研究以及机器人实时运动控制器开发领域仍欠缺相关经验。面对作业环境恶劣、场景差异性大、施工面复杂多变等客观现实,建筑机器人在核心零部件以及核心算法的要求方面,与工业机器人等产品有很大差异。

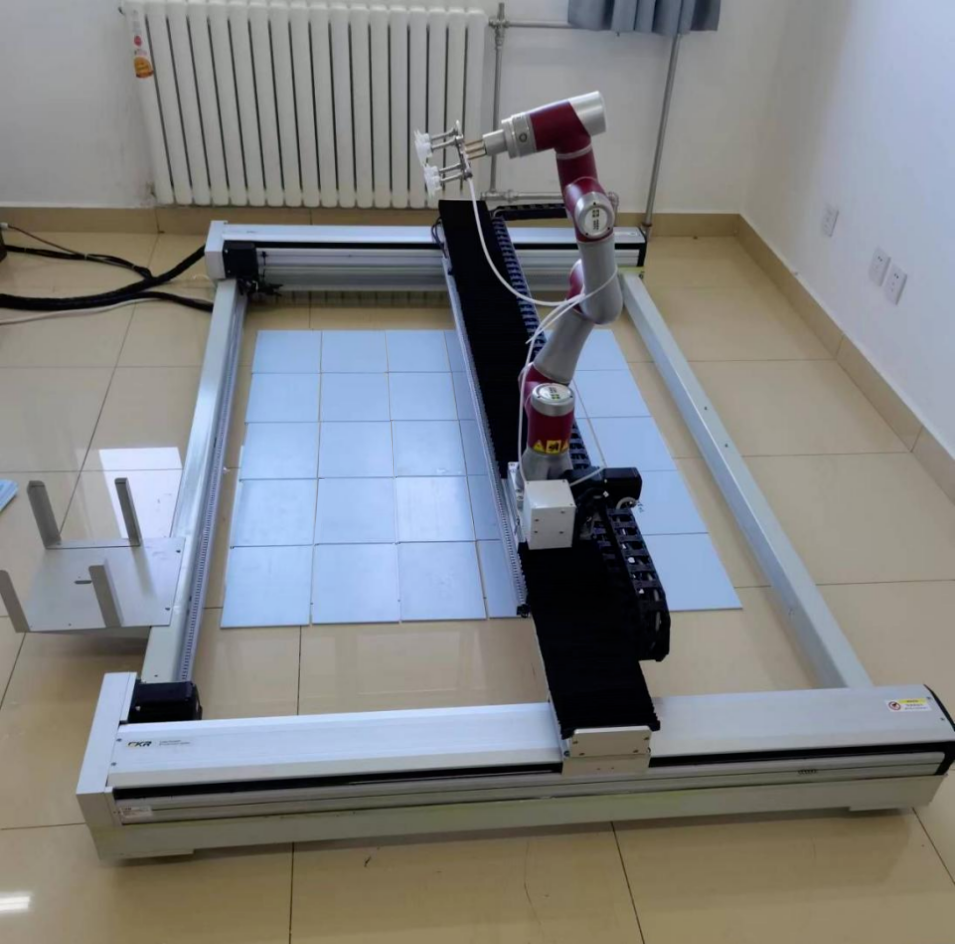
图 | 智能机器人协作铺砖系统模型图和现场图
中科深谷CSPACE实时仿真控制系统在机器人控制器开发领域拥有丰富的研发经验以及成熟产品,在建筑机器人算法研究方向积累了多年的研究经验,控制器全开源,成功为西安某高校提供专业详细的定制化解决方案。

该方案通过采用CSPACE实时仿真控制系统,针对复杂的智能铺地砖机器人,构建精确的系统控制模型,以XY模组代替机器人移动的脚,节卡协作机械臂代替人工的手,视觉系统代替人的眼睛,控制系统代替人的大脑,整套系统完美模拟了建筑工人在实际建筑工作中的场景。
智能机器人协作铺砖系统是基于CSPACE实时仿真控制系统和MATLAB/Simulink开发的教科研平台。其由机械臂本体(6个机械臂关节及其连杆和底座)、控制系统、铺砖工具、上位机和稳压电源组成。每个机械臂关节由谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器和伺服驱动器组成。
智能铺瓷砖机器人代替工人从瓷砖盒里拿瓷砖,再抹灰,搬送到贴瓷砖处,轻轻放下,检查瓷砖贴入位置,最后轻压瓷砖的动作,确保瓷砖整齐严实,逐步实现了在智能建筑行业的工业化、智能化、柔性化、数字化的有益探索。
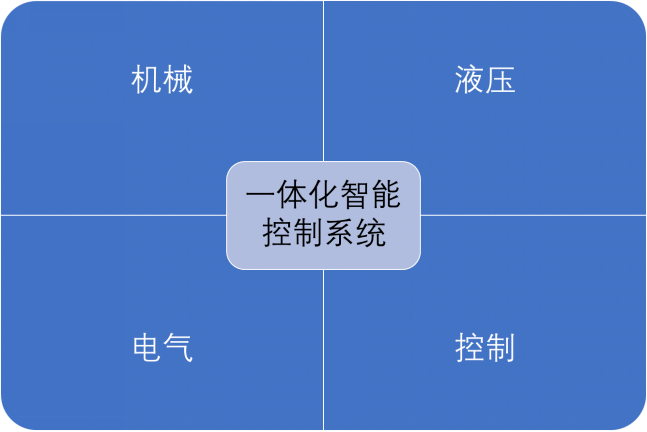
02、综掘工作面迈步式掘锚支协同机器人
掘进机器人系统同样是当前一个新兴细分领域,其涉及机械、液压、电气、控制等多个庞大而复杂的领域,对各种技术的协同和融合要求非常高。产品开发往往需要以智能化控制为核心,将产品研发和过程控制作为一个完整的系统,贯穿于设计和制造的全过程。
中科深谷助力国内某高校研究的全新综掘工作面迈步式掘锚支协同机器人给出了解决方案。

据悉,中科深谷同样是通过采用CSPACE实时仿真控制系统,针对复杂的液压机器人设备,构建精确的系统控制模型,反复联调测试改进,直至每个液压单元正常工作,实际效果与仿真一致,同时基于MBD方式优化改进控制算法,高效解决机电液系统动态参数辨识、泵阀复合电液控制功率匹配与自适应协同控制、电控系统脉动监测与抑制等核心技术难点。

无人智能农业分拣作业系统
CSPACE实时仿真控制系统助力农业生产自动化
在农业领域,仿真验证技术的高效、研制周期短、制成本低成了机器人来应对农民在农业生产领域面临的基础设施低、生产成本高的挑战,其中机器人自动化过程、计算机视觉抓取、分拣和包装机器人的协调能力和跟踪等技术帮助农民实现了农业生产自动化、精准化。不仅可以使农业生产更高效,还能降低传统农业资源消耗!
凭借着多领域产业布局的优势,中科深谷就在CSPACE实时仿真控制系统的基础上,推出了全柔性农业智能分拣作业系统。
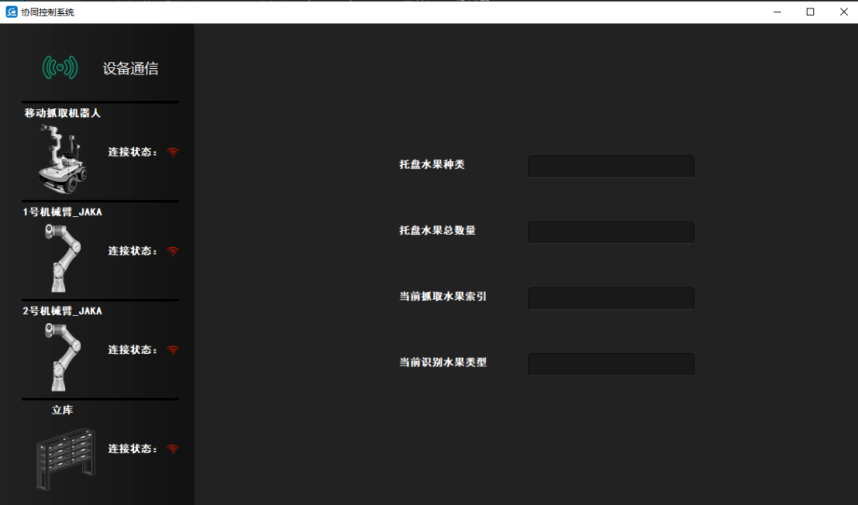
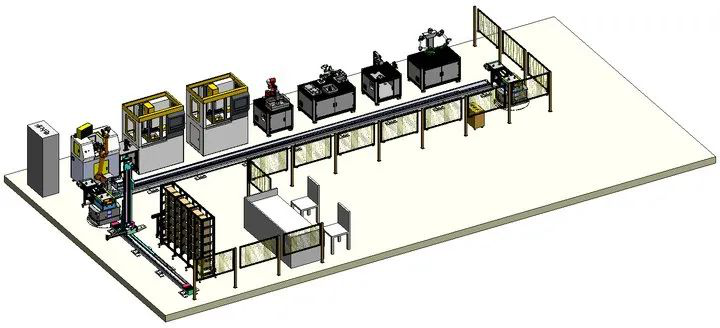
该系统通过无人驾驶智能采摘平台与基于深度学习的自动拣选平台和无人化智能仓储及协同控制系统组合,实现客户一站式实现采摘、运送、分拣、存储环节的全流程自动化的需求。同时,该系统可以根据实际需求灵活扩展,兼具高柔性、高效率和高准确性的优势。

据悉,目前无人化智能农业分拣作业系统已成功应用在某省无人智慧中心建设项目。
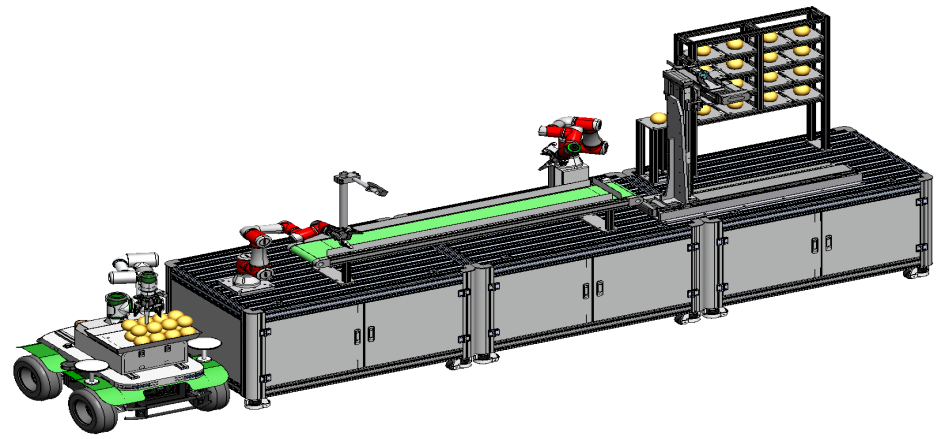
在中科深谷协同控制系统的支持下,无人驾驶智能抓取平台与无人控制开源识别平台和仓储货架及控制系统协同合作,采摘、运输、识别、存储环节均无需人工操作,进一步提升整体效率和自动化能力、降低配送成本。
民生医疗 腔镜手术机器人
CSPACE实时仿真控制系统助力微创精准诊疗
目前,医疗机器人行业已经有微型仿生机器械臂、腔内开放视野的视觉成像技术等多项创新,但很多医疗器械公司在手术机器人核心算法研究以及机器人实时运动控制器开发领域仍欠缺相关经验。
因此,中科深谷CSPACE实时仿真控制系统凭借在机器人控制器开发领域拥有的丰富研发经验以及成熟产品,以客户需求为导向,以技术能力为基础,为客户提供了专业详细的定制化解决方案。
据悉,该方案通过采用CSPACE实时仿真控制系统,针对复杂的九轴手术机器人,构建精确的系统控制模型,搭载有实时内核的运动控制器,总线运动控制周期可达1ms。
基于模型设计方法(RCP&HIL)优化改进控制算法,高效解决参数辨识、高精度的正逆运动学求解以及笛卡尔空间轨迹规划、狭小空间的臂型角运动控制等核心技术难点,最大程度实现了用少量的人手快速开发一套安全、实时的设备。同时,CSPACE实时仿真控制系统解决方案也让临床中患者手术的安全更能得到保障,手术路径提前得到优化。
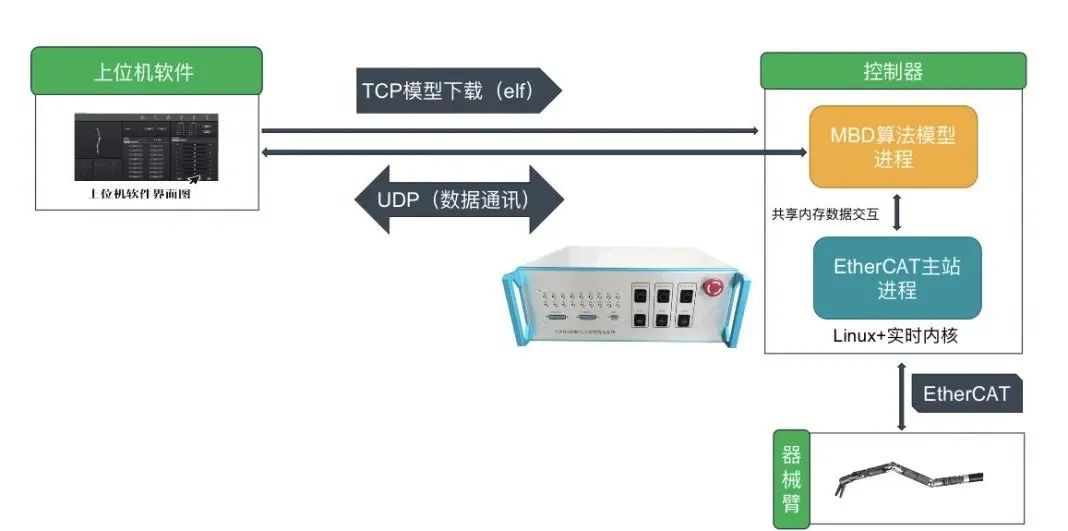
图 | 控制器功能架构图
机器人与智能制造科研方向
CSPACE实时仿真控制系统助力科研院所搭建机器人科研平台
科研领域同样是CSPACE大显身手的重要舞台。CSPACE在搭建工业机器人科研平台和高校教学领域都有着较强价值。
据悉,CSPACE助力合肥工业大学搭建工业六轴机器人科研平台,实现对EtherCAT总线机械臂的运动学和动力学控制,助力该校教师生在该平台上实现复杂的控制算法创新。
而在哈尔滨工程大学智能制造产线中,则通过CSPACE与协作机器人协同应用,拓展智能化系统中的数字化能力,使制造和过程运营管理更敏捷地响应未来需求。
正由于实时仿真的优势,CSPACE已经在许多高校及科研院所得到了越来越多的应用。在教学过程中学生可以通过实时仿真器来对控制器进行非常接近真实情况的测试与验证。基于实时仿真的实验系统引进先进理念和技术,支持设计型、研究型创新实验的开展,适应创新型人才的培养需要。

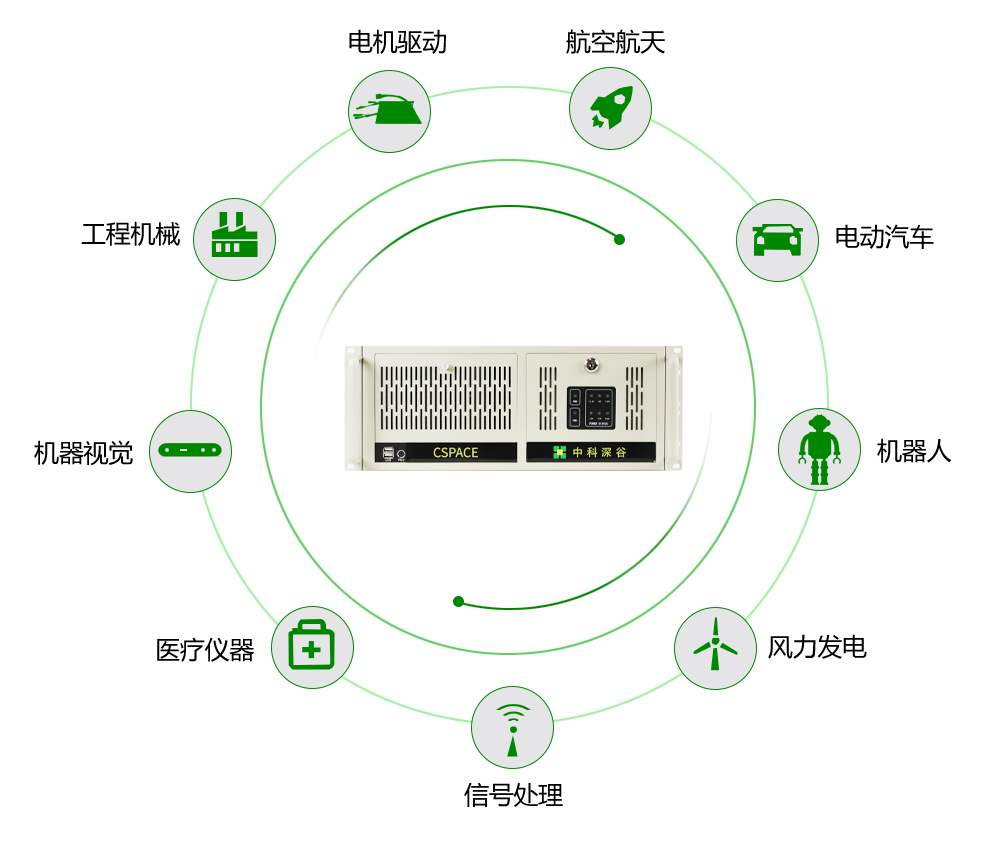
目前,该系统广泛应用于机器人、电机驱动、电力电子、汽车电子、自动驾驶、过程控制、机电一体化设备等控制领域,能有效支撑高校教学中的自动化、机器人、机械电子、电气工程、机械工程、电子信息等专业教学中的《机电传动控制》、《自动控制原理》、《现代控制理论》、 《智能控制理论》、《MATLAB 编程与应用》、《传感器与检测技术》、《信号与系统》、《机器人学》、 《电机学》 、《运动控制系统》 等建模与仿真教学课程。
通过以上CSPACE实时仿真控制系统的经典案例不难看出,CSPACE实时仿真控制系统可以完全融合各种机器人,并拓展了机器人功能中“人”的属性,使得机器人能出色地融入不同定制化场景,实现效率最大化。
随着人工智能产业发展成熟,机器人将持续推动生产水平提高、生活品质提升,有力促进经济社会可持续发展。在此过程中,中科深谷正在保持着创新理念,深度挖掘客户需求,根据行业经验,精准挖掘企业痛点,并以创新举措提供着更专业的应用解决方案,为建设现代化经济体系、构筑美好生活新图景,提供强力的技术支撑,推动我国产业升级,加快实现高质量发展。

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)