
深谷产品课堂——多电机驱动控制综合实验平台学习和操作
2022-12-13
大家好,欢迎关注深谷学院《深谷产品课堂》系列文章,在上期的课堂中,我们学习了开源三轴协作机械臂产品的操作,本期为大家带来的是多电机驱动控制综合实验平台学习和操作。
环境版本
· 主机系统版本:Windows10 64位
· 处理器型号:Intel-i7
· Matlab版本:Matlab R2020b
· 上位机软件(免安装):cSPACEWatch
学习目标
知识储备
首先学习电机平台本体结构。
多电机多托平台包含三组不同的对托组合:永磁同步电机对托直流有刷电机、永磁同步电机对托直流无刷电机、永磁同步电机对托交流异步电机。
其中各个对托平台的正下方,排布有电机线接口、编码器线接口、力矩传感器线接口。

2、配线
一条仿真线
一条电源线
一条USB延长线
一条“UART”通信线
两条“QEP”编码器线
两条电机“电机”相线一条“扭矩信号” 线
3、CSPACE控制箱
(1)控制箱简介该产品基于 DSP28335 和 Matlab/Simulink 开发,拥有 AD、DA、IO、Encoder、PWM、CAN、SPI 等丰富的硬件外设接口,包含一套功能强大 的监控软件。该产品软件上支持 MATLAB/Simulink 进行模块化编程开发,结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP) 设计的功能,是基于模型设计(MBD:Model-Based Design)典型的产品,是国内可对标国际控制与仿真产品的本土化快速控制原型与半实物仿真系统。
(2)控制箱接口资源 紧急制动开关、控制器电源复位按钮、电机线接口、1 路 JTAG 接口电路(方便用户 debug 调试)、编码器接口、扭矩传感器接口、UART串口通讯接口。

任务实施
任务实施包括以下内容。接下来分别进行讲解与演示。
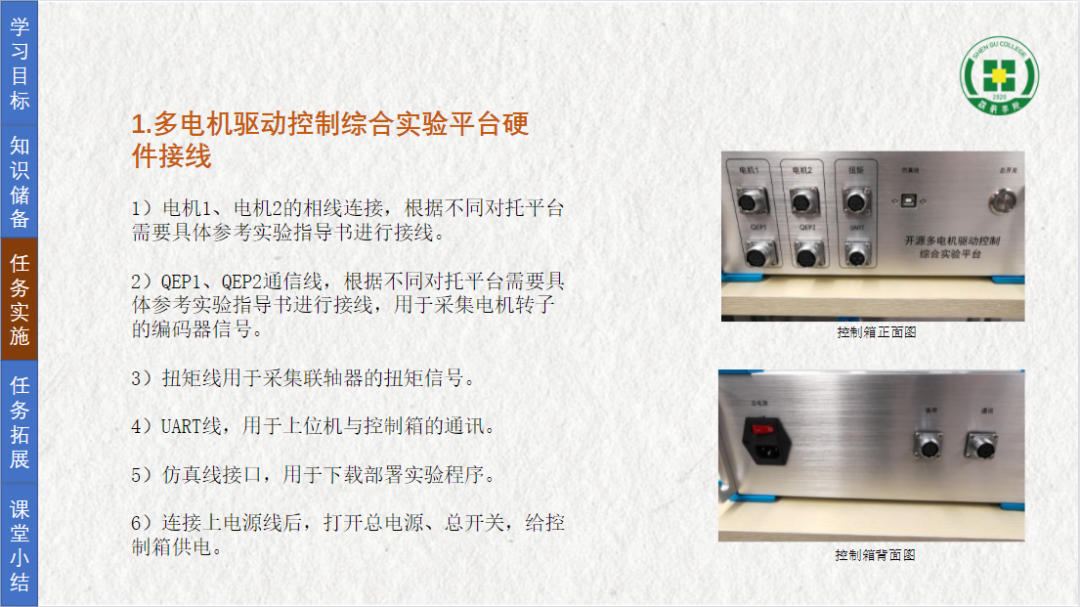
1、多电机驱动控制综合实验平台硬件接线
1)电机1、电机2的相线连接,根据不同对托平台需要具体参考实验指导书进行接线。
2)QEP1、QEP2通信线,根据不同对托平台需要具体参考实验指导书进行接线,用于采集电机转子的编码器信号。
3)扭矩线用于采集联轴器的扭矩信号。
4)UART线,用于上位机与控制箱的通讯。
5)仿真线接口,用于下载部署实验程序。
6)连接上电源线后,打开总电源、总开关,给控制箱供电。
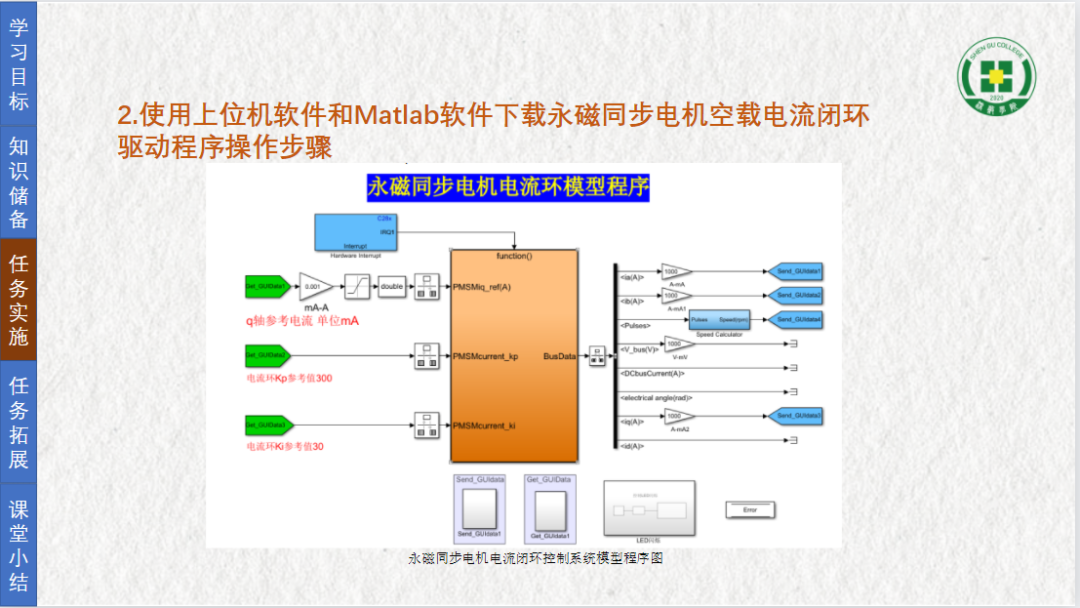
2、使用上位机软件和Matlab软件下载永磁同步电机空载电流闭环驱动程序操作步骤
第一步:在Matlab里,在英文路径下打开示例模型“B_CurrentClosedLoopPMSM.slx”
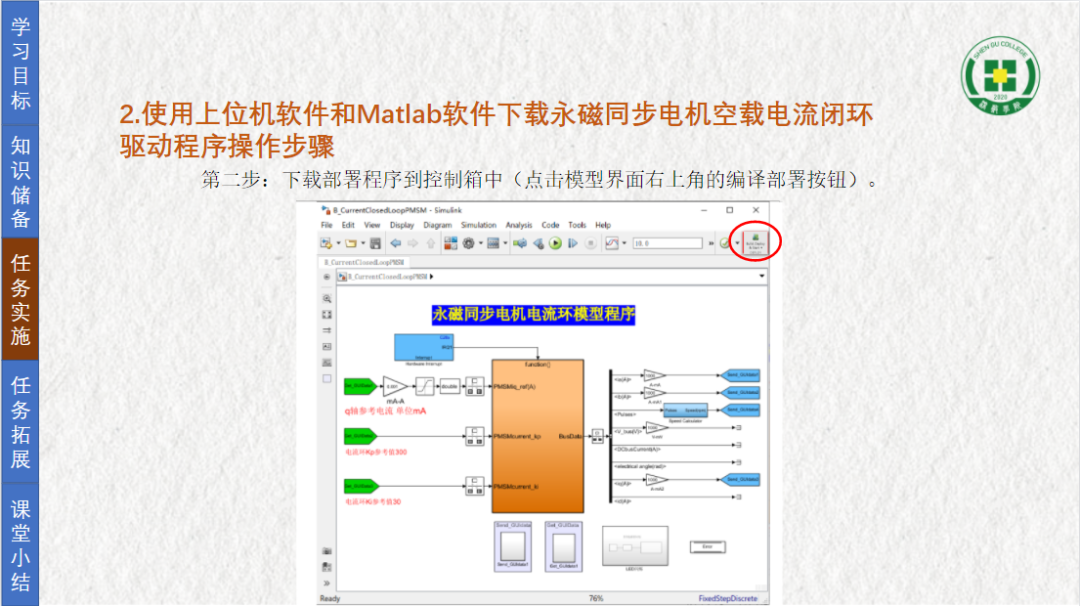
第二步:下载部署程序到控制箱中(点击模型界面右上角的编译部署按钮)。
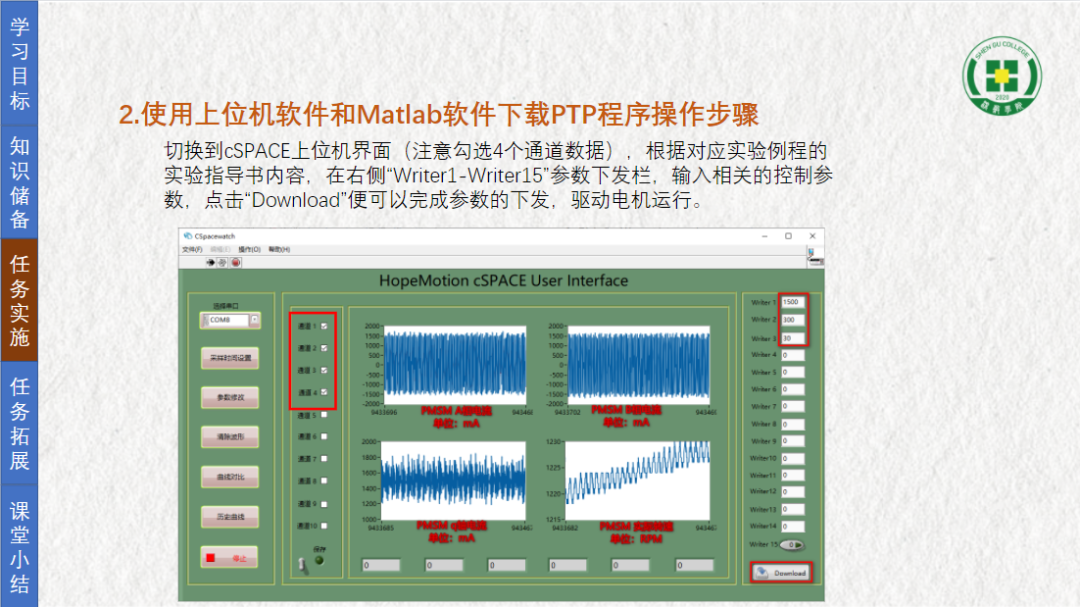
切换到cSPACE上位机界面(注意勾选4个通道数据),根据对应实验例程的实验指导书内容,在右侧“Writer1-Writer15”参数下发栏,输入相关的控制参数,点击“Download”便可以完成参数的下发,驱动电机运行。
课堂小结
下面我们进行课堂小结:
1、简述控制箱接口资源和多电机平台组成。
2、学会使用Matlab软件和上位机配合使用下载程序的步骤。
3、 使用时要注意电机发生异常运行时候,及时关闭控制箱电源。

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)