
深谷技术 | 图解步进电机驱动原理
2023-01-03
步进电机是通过脉冲信号来进行控制,每输入一个脉冲信号,步进电机前进一步。步进电机旋转的步距角,是在电机结构的基础上等比例控制产生的,如果控制电路的细分控制不变,那么步进旋转的步距角在理论上是一个固定的角度。在实际工作中,电机旋转的步距角会有微小的差别,主要是由于电机结构上的固定有误差产生的,而且这种误差不会积累。
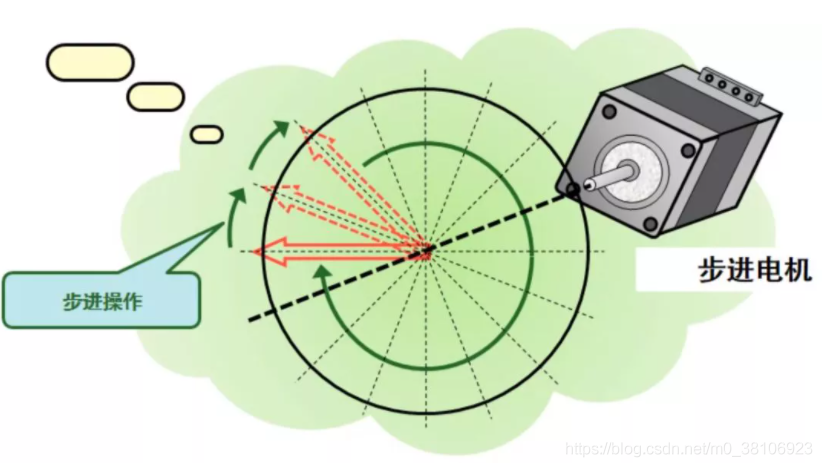
步进电机驱动原理
步进电机的总极数越大,加工精度的要求就会越高。通常工业用混合型步进电机的步距角是1.8度,就是200极。
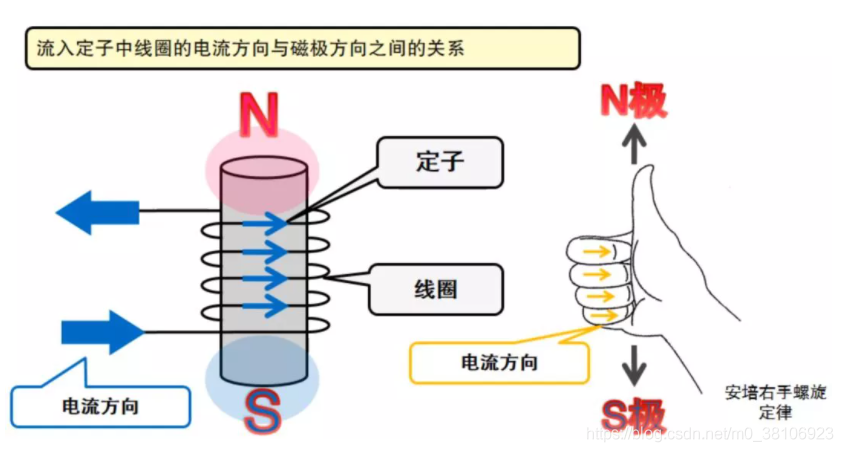
步进电机的相电流及磁场,遵循安培右手螺旋定律,由电能产生磁场能量,控制电机相电流,就能使电机定子的磁极方向发生反转,二相磁场的变化相配合,进而产生电机的旋转。
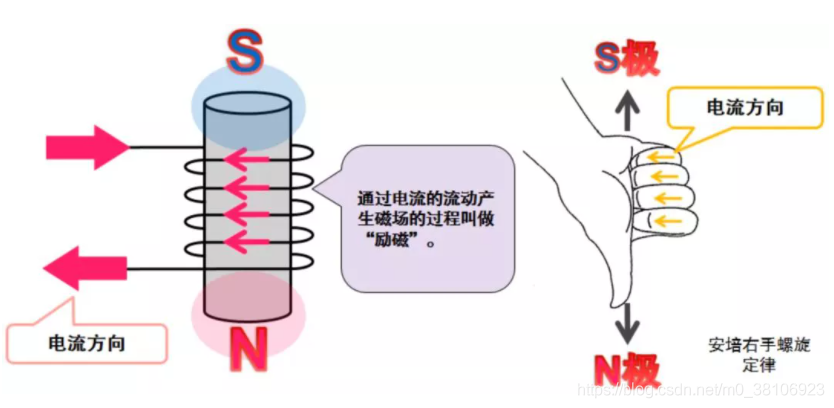
如果电流方向发生变化,磁极的方向也会发生变化,步进电机的电流流过定子产生磁场的过程叫做励磁。
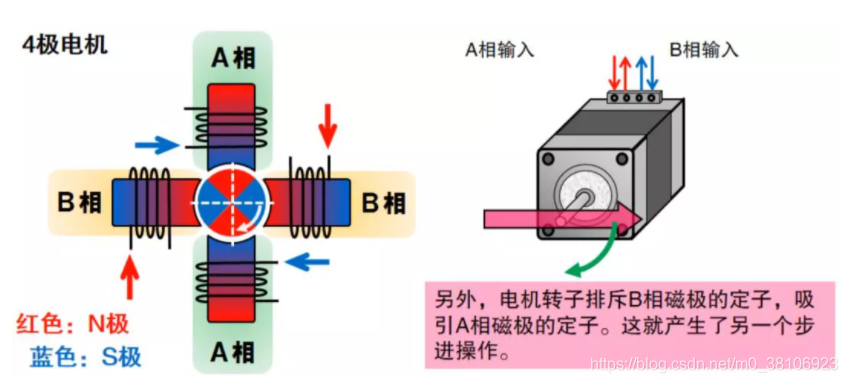
通常所说的二相步进电机,电机转子的旋转,包含不同磁极的磁场相斥和相吸实现的。如下图所示,A相产生N极磁场吸引转子的S极,B相产生S极磁场吸引转子的N极,使定子产生旋转的动力。如果改变A、B相定子线圈的电流方向,电机会产生另一步的旋转。连续改变A、B相定子线圈的电流方向,电机会产生连续的旋转。
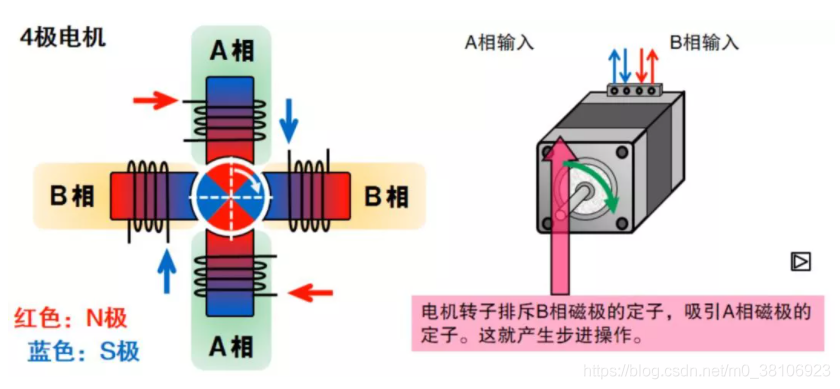
电机的运动是通过改变电流在电机中的流动来实现的,电子转子排斥B相磁极的定子,吸引A相磁极的定子,这就产生了另一个步进操作,如下图所示:
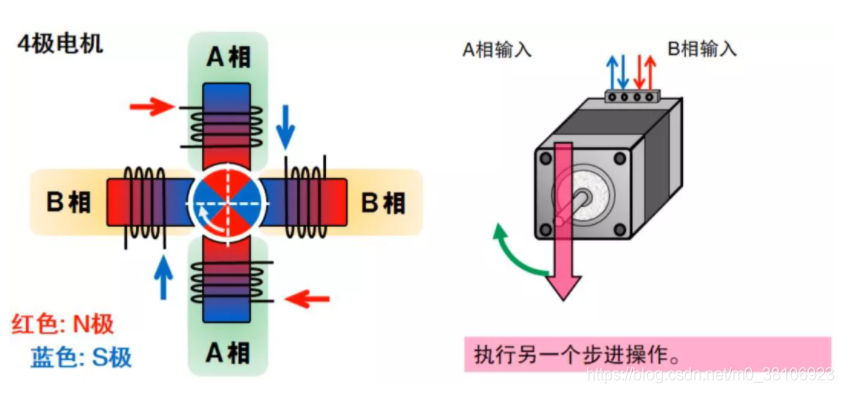
执行另一个步进操作,电机定子磁极反转,转子排斥B相磁极的定子,吸引A相磁极的定子,如下图所示:
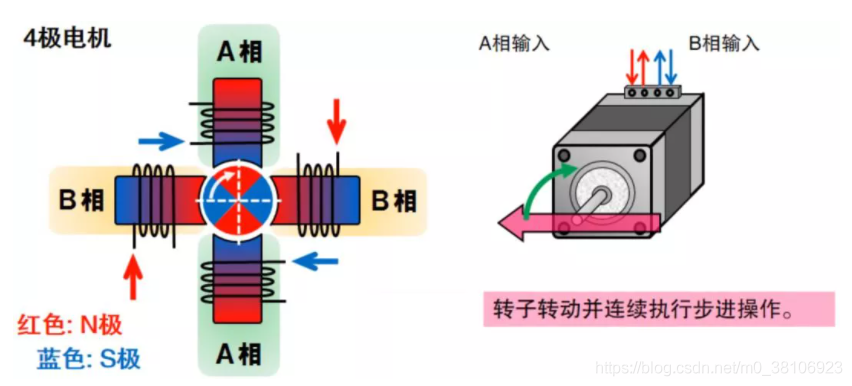
定子线圈中的电流方向无论何时发生变化,磁极将会反转,转子重复步进操作。东芝步进电机驱动控制电路对电机的磁场励磁的控制,是通过脉宽调制方式实现的,能够实现电机高效、稳定的运行。如下图所示:
步进电机的操作模式
步进电机的基本操作模式称为“励磁模式”,能够使步进电机工作在全步模式、半步模式和微步模式,其中微步模式能够有效的降低步进电机相电流的噪声,能够改善步进电机固有的噪声震动问题。下面将介绍3种励磁模式。
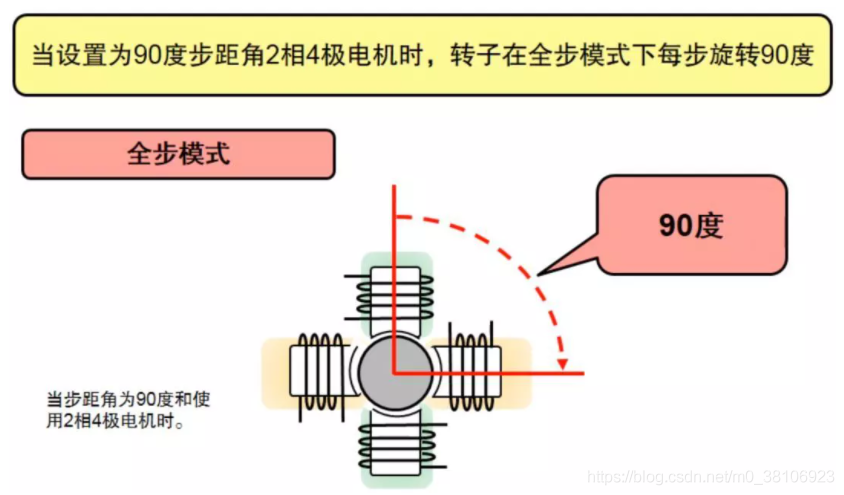
(1)全步模式所谓全步模式,就是依据电机固有结构设计固定的步距角工作,一个电脉冲,步进电机前进一个步距角。这个步距角使电机设计结构所决定的,也可以理解为电机以最大的步距角旋转。
(2)半步模式半步模式是以电机固有的结构决定的步距角的一半角度进行步进旋转。如下图所示,步进电机的总极数是4级,对应的步距角是90度,那么半步模式下,步进电机每个脉冲旋转45度。
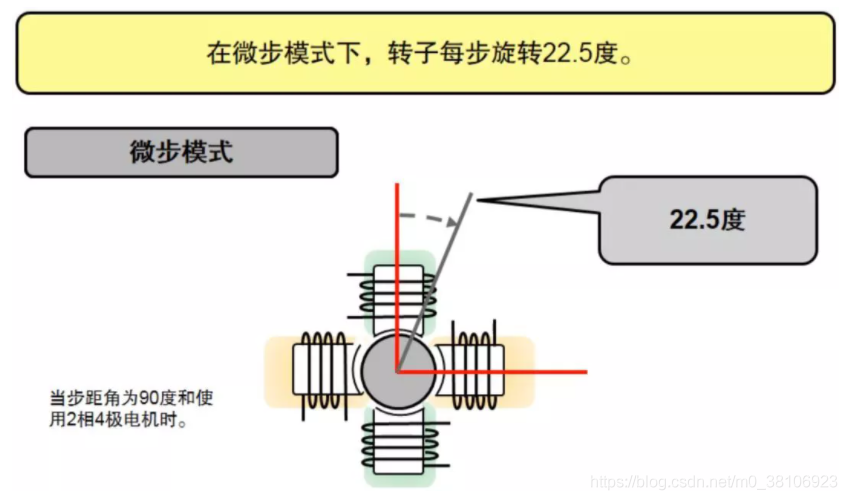
(3)微步模式微步模式类似于半步模式,步距角更小,就是1/4步、1/8步、1/16步,可以到很高的细分。对应的步进角度就是在整步步距角乘以微步系数。

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)