
深谷技术 | 自主导航移动机器人的系统设计与实现
2023-01-06
随着社会生产力水平的提升,机器人在不同行业的应用越来越广泛,如物流搬运、自动清洁、工业、农业、医疗服务、 太空探索、军事、智能交通和娱乐等行业;目前大规模投入应用的机器人大都安装在固定工位上,缺乏一定的灵活性和自主性;机器人要实现灵活性和智能化,提高其定位精度和导航性能是关键。本课题针对室内物流搬运行业,开展了自主导航移动机器人的系统设计与实现,使移动机器人在不断变化的室内环境 中获得其准确定位,并在室内环境中开展物流搬运作业时,实现安全、高效的导航与避障。


机器人系统方案设计
首先是进行机器人系统方案设计。机器人系统方案设计包括机械结构设计、软件系统设计以及控制系统设计。移动机器人的机械结构结合了车体结构、悬架机构和驱动系统, 具体包括机器人的伺服电机、驱动器、减速器、前后保险杠、电气控 制面板、充气轮胎、连接件及各种传感器等。机器人的结构设计需要简洁紧凑、 移动灵活,且具有一定的承载能力,机器人需要提升定位精度,在导航过程中,机器人可以自主、 高效地完成路径规划和避障,机器人要需要上位机软件来进行人 机交互,以显示其各项运行信息,提高操作效率。移动机器人车体结构采用模块化设计,具有拆装便捷、 集成度高的特点。为实现机器人在移动过程中能适应颠簸的路况,能够缓冲、吸收与地面产生的振动,设置独立悬架机构要保证机器人移动的平稳性。悬架机构上臂两端的铰接点与下臂两端的铰接点形成平 行四边形,避免轮子悬空,保持轮子的抓地力。轮子与动力输出件通过万向节连接,适用悬挂机构的上下移动。
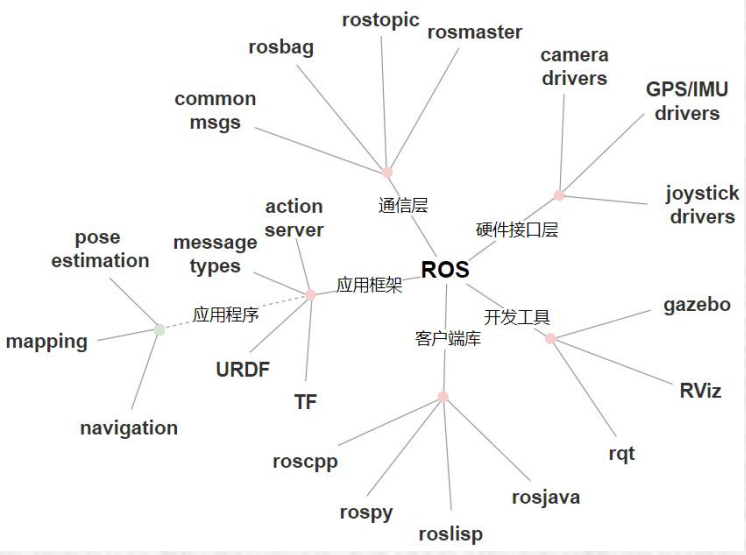
软件系统设计一般采用ROS系统,ROS 机器人操作系统是一个开源软件框架,可为 用户提供通用消息系统、设备驱动程序、硬件抽象层、 功能实现和功能包管理,ROS组件如右图所示。
采用ROS操作系统作为移动机器人系统设计,主要有以下优点:
1. ROS 采用了分布式框架,便于模块化修改。
2. 架构精简,集成度高,便于移植和复用。
3. 具有多种可视化应用工具和仿真软件,如RViz、 Gazebo、rqt 等。
4. 支持多编程语言,如C++、python、java 等。5.ROS软件社区免费且开源。
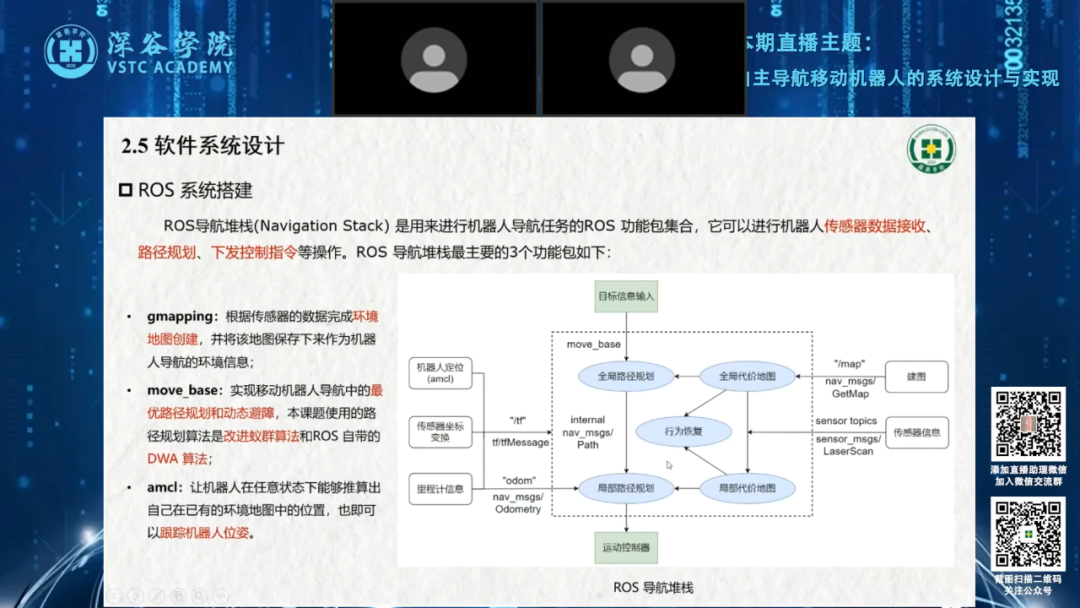
ROS导航堆栈(Navigation Stack) 是用来进行机器人导航任务的ROS 功能包集合,它可以进行机器人传感器数据接收、 路径规划、下发控制指令等操作。
ROS 导航堆栈最主要的3个功能包如下:
• gmapping:根据传感器的数据完成环境地图创建,并将该地图保存下来作为机器人导航的环境信息;
• move_base:实现移动机器人导航中的最优路径规划和动态避障,本课题使用的路径规划算法是改进蚁群算法和ROS 自带的 DWA 算法;
•amcl:让机器人在任意状态下能够推算出自己在已有的环境地图中的位置,也即可以跟踪机器人位姿。
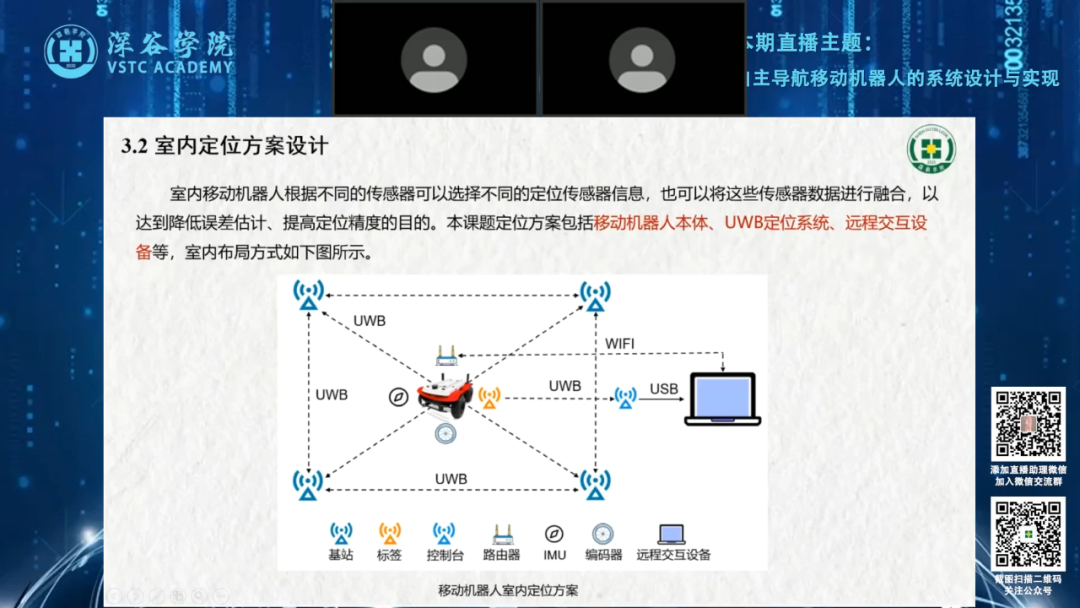
自主定位导航技术是实时定位、自主地图构建和运动规划与控制技术的统称。它可帮助机器人在非结构化的环境中无需人工参与而自主地移动完成既定的任务。通俗来说,就是解决机器人“我在哪里”、“我要到哪里去”以及“我该如何过去”这三大问题。正因为其重要性,自主定位导航技术一直以来都是行业内的研究发展重点。移动机器人通过传感器感知环境和自身状态,进而实现在有障碍物的环境中面向目标自主运动。而定位则是确定移动机器人在工作环境中相对于全局坐标的位置及其本身的姿态,是移动机器人导航的基本环节。
目前,应用于自主移动机器人的导航定位技术有很多,归纳起来主要有以下几种:
1、视觉导航定位:
在视觉导航定位系统中,目前国内外应用较多的是基于局部视觉的在机器人中安装车载摄像机的导航方式。
视觉导航定位系统的工作原理简单说来就是对机器人周边的环境进行光学处理,先用摄像头进行图像信息采集,将采集的信息进行压缩,然后将它反馈到一个由神经网络和统计学方法构成的学习子系统,再由学习子系统将采集到的图像信息和机器人的实际位置联系起来,完成机器人的自主导航定位功能。
2、光反射导航定位:
典型的光反射导航定位方法主要是利用激光或红外传感器来测距。激光和红外都是利用光反射技术来进行导航定位的。
激光测距具有光束窄、平行性好、散射小、测距方向分辨率高等优点。
典型的红外传感器包括一个可以发射红外光的固态发光二极管和一个用作接收器的固态光敏二极管。由红外发光管发射经过调制的信号,红外光敏管接收目标物反射的红外调制信号,环境红外光干扰的消除由信号调制和专用红外滤光片保证。红外传感定位同样具有灵敏度高、结构简单、成本低等优点,但因为它们角度分辨率高,而距离分辨率低,因此在移动机器人中,常用作接近觉传感器,探测临近或突发运动障碍,便于机器人紧急停障。
在这给大家分享一个有关机器人运动学的直播课程【自主导航移动机器人的系统设计与实现】,内容涵盖:机器人、结构设计、控制系统设计、软件系统设计、机器人定位技术,基于ROS的机器人路径规划。
如果你也对机器人感兴趣,如果你想了解移动机器人设计与控制的知识,请仔细阅读这篇文章,本篇文章将带你快速了解课程的结构与内容,让你提前把握知识框架,第一时间获取最新的资讯与信息。

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)