
开源3D视觉精密装配与螺丝锁付双臂机器人系统助力汽车行业自动化改造
2023-01-09
近年来,随着社会经济发展、科技进步及工业水平不断提高,智慧工业发展模式在世界范围内广受关注。在智能制造领域,双臂协作机器人比传统单臂具有更高的灵活性、操作性和负载能力等,其协作机器人更是以其安全、稳定,可实现“人机协作”生产的特性,一跃成为“人气”产品。
中科深谷CSPACE实时仿真控制系统助力陕西某高校最新研发的开源3D视觉精密装配与螺丝锁付双臂机器人系统打通协作机器人产业链上下游。
01 背景
在汽车行业传统生产中,螺丝锁付工艺多以螺丝锁付机或人工为主,然而无论是标准还是非标螺丝锁付机或工人作业,都有受限于平面内锁付任务重、占地面积大、二次布署困难等现实性问题,且投资回报率低、产品产量不稳定。基于此,中科深谷破除自动化改造难题的答案是:开源3D视觉精密装配与螺丝锁付双臂机器人系统核心技术,打通协作机器人产业链上下游,以协作机器人构建协作应用场景,助力汽车行业自动化升级改造。
02 痛点
目前,汽车行业的装配工序主要由人工操作,劳动强度大,装配效率低、质量不稳定;由于工件种类多、工况复杂等原因,传统自动化难以满足产线柔性化生产需求。所以,精确抓取和定位装配显得尤为重要。而中科深谷CSPACE实时仿真控制系统在机器人控制器开发领域拥有丰富的研发经验以及成熟产品,并在汽车、重工、家电、家具、军工、新能源汽车充电、换电等领域算法研究方向积累了多年的丰富经验,对行业痛点有深入调研。
03 解决方案
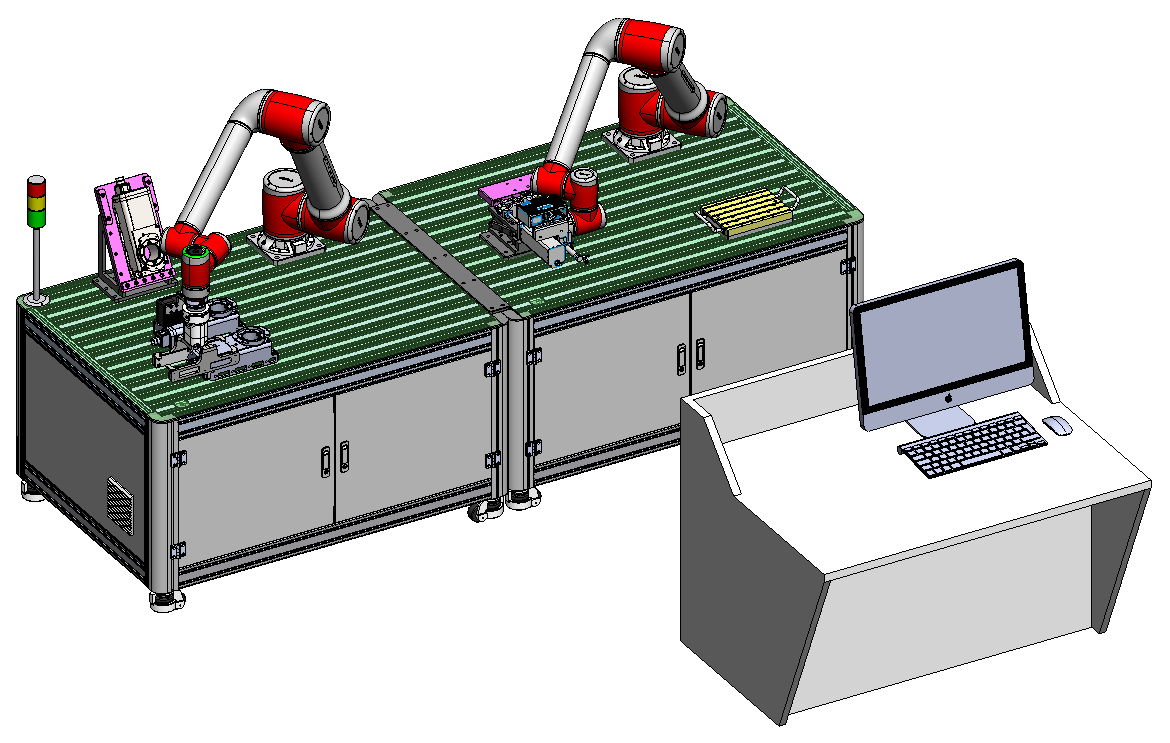
中科深谷以客户需求为导向,以技术研发能力为基础,为陕西某高校提供专业详细的定制化解决方案。该方案通过采用CSPACE实时仿真控制系统,针对于开源3D视觉精密装配与螺丝锁付双臂机器人,核心运动控制系统和伺服驱动器全自主开发。采用3D视觉引导机械臂实现精密抓取和定位装配。基于模型设计(MBD)工程开发方法实现机械臂运动学、动力学算法开发与应用,提供丰富的控制案例程序,配套有上位机监控软件,可实时在线修改控制参数、监控机械臂的参数,不仅方便教学,还能为深层次的协作机械臂或相关的机器人科研提供支撑。

开源3D视觉精密装配与螺丝锁付双臂机器人系统的特点和优势
01 具有强大的算法库:自主研发的开源智能机器人控制系统,集合了机器视觉、智能力控、运动学、动力学以及机器学习等算法,采用ROS控制系统对视觉、夹爪、机械臂、力传感器进行联调控制,系统算法全部开源;
02 协作机械臂的控制系统全部开源,伺服驱动器全自主研发,提供正逆运动学、笛卡尔空间和关节空间的轨迹规划、重力补偿、零力拖动示教、柔顺控制(阻抗控制)等运动学、动力学算法实验案例;
03 提供3D视觉开源算法,包括图像处理基础知识和实验,边缘、线段、轮廓检测,支持向量机SVM、最近邻分类算法KNN机器学习算法,机械臂和视觉系统的手眼标定,视觉抓取,双臂视觉标定和作业等实验;
04 完善的系统开放性及定制能力,丰富的软硬件接口,支持EtherCAT、CAN、Ethernet等多种通讯方式,便于研究人员采用自主的控制系统进行控制,也可以用系统自带的Simulink和ROS进行二次开发;
05 提供丰富的应用场景:单臂操作,双臂协同,柔顺控制,力控装配,拖动示教等;
06 支持多传感器融合,支持智能语音控制、智能图像识别控制、5G远程控制等应用扩展。
开源3D视觉精密装配与螺丝锁付双臂机器人是协作机器人经典应用,是一种被设计成能与人类在共同工作空间中进行近距离互动的机器人。当下协作机器人快速发展正在改变整个汽车行业,尤其是螺丝锁付协作机器人近年发展迅猛。3D视觉精密装配与螺丝锁付双臂机器人智能化水平较高,凭借效率高、工作精密化等优势与特性,一定程度上能缓解汽车装配工人紧缺问题。3D视觉精密装配与螺丝锁付双臂机器人可实现精密装配与螺丝锁付过程的全自动化,双臂协作机器人在未来的汽车装配行业应用中必将具有更加广阔的应用前景。而中科深谷开源3D视觉精密装配与螺丝锁付双臂机器人的问世,加速了汽车行业的自动化升级改造。未来中科深谷将持续研发创新,为双臂协作机器人系统研发提供更加高效、专业的工具与技术支撑。

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)