
中科深谷助力煤矿行业高质量发展 | 第六届全国煤炭类院校机械工程学院院长/系主任联席会议在淮南成功召开
2023-04-25
4月22日,第六届全国煤炭类院校机械工程学院院长/系主任联席会议在安徽淮南成功召开。

本次会议由中国工程机械学会矿山机械分会主办,安徽理工大学机械工程学院、 深部煤矿采动响应与灾害防控国家重点实验室 、矿山智能技术与装备省部共建协同创新中心(安徽省)、 矿山智能采掘装备协同创新中心(江苏省)、 矿山智能装备与技术安徽省重点实验室 、智能矿山技术与装备安徽省工程实验室 、机械工业矿山采选装备智能化重点实验室承办,合肥中科深谷科技公司协办。
本次大会还邀请了行业内知名的专家、学者及企业参会,如中国矿业大学(北京)教授张晞、黑龙江科技大学教授董星等行业专家学者。众多行业大咖齐聚淮南,共探“矿山机械制造”领域中技术和应用的发展。
中科深谷作为此次会议的协办方,携“深度学习视觉伺服作业平台”、“图像处理及机器视觉综合实验平台”、“小蚂蚁移动机器人”、“移动抓取机器人”等多个开源核心设备登录会议现场,引来众多专家学者的驻足了解。

此外,中科深谷作为核心硬件供应商及集成智造商,目前已经助力国内某高校研究的全新综掘工作面迈步式掘锚支协同机器人给出了解决方案。
中科深谷综掘工作面迈步式掘锚支协同机器人,由撑网系统、锚固系统、地面支撑系统和动力及转弯系统组成,基于新型锚护工艺下的围岩特性,应用智能变频驱动技术、多锚杆钻孔自动接续技术、全断面自动铺网技术以及空间多维度同步支护技术,最大程度实现了掘锚支多工序并行作业。
机身结构简单,占地面积小
总机尺寸为,长 2.2 米,宽 0.9 米,高 1.5 米,重约:1.42t。整体装备的体积较小,适用于空间体积小且环境较为恶劣的煤矿巷道,且装置主要部件具有可收缩功能,可以根据巷道的实际工况及时调整装备的姿态,以便高效率作业。
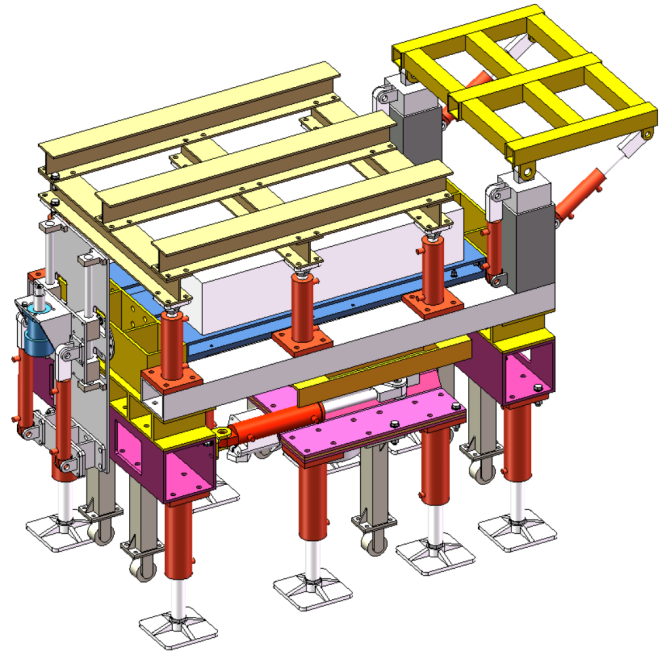
行走系统,行进平稳,稳定性强。
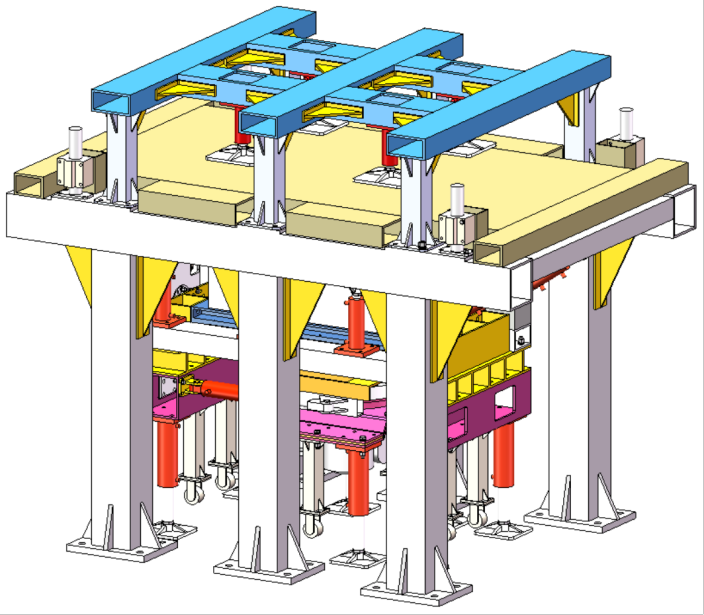
地面支撑液压缸组依次收缩离开巷道底板,依靠内部的推进液压缸作用,实现迈步行进的动作。
如下图所示行走系统共3组液压缸:2组液压支腿,一组横向推移油缸。其中,第一组4个液压缸一起联动,第二组4个液压缸一起联动,两横向推移油缸一起联动。
该运动过程,摩擦阻力较小,且地面支撑液压缸组可依据巷道底板的不平整度自动调节液压缸的伸缩量,确保整套设备的稳定性。
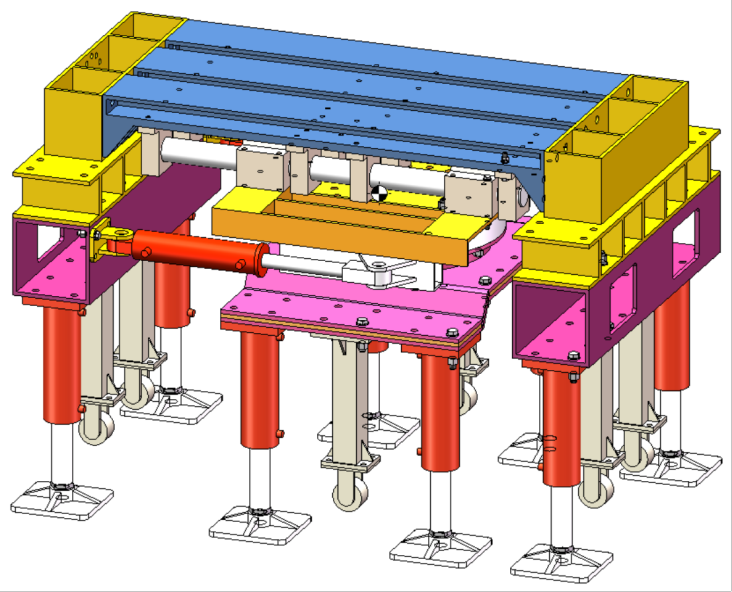
转弯灵活,机动性能好
由回转台、与液压马达组成,回转台上部连接机架,下部连接第二组支腿,通过安装于机身上的两个转弯液压缸协同推动撑网系统中的主梁和地面支撑系统中的地面支撑液压缸组运动。同时,设备采用模块化结构设计,各模块长度较短且彼此间允许摆动一定角度,增加了综掘工作面迈步式掘锚支协同机器人转弯的灵活性。
支、锚协同作业,负载能力强
锚杆钻机灵活度高、作业区域大且彼此间可进行协同工作,提高了锚固的速度
负载系统与行走系统、支护系统、锚固系统独立,且三组液压缸组相互独立,每一组内部液压缸需满足同步要求,三组液压缸之间可实现同步升降动作、异步升降动作,负载可达3000kg。
机电液一体化智能控制系统
电液传动与传统机械传动比较,体积小、质量轻、结构紧凑,而且元件布局灵活,十分有利于设备的快速连接、启动、制动,便于快频率的换向实现大范围的调速。控制器和信息处理设备是机电液一体化设备的核心部分,通过控制器实现智能化、信息化控制,实现高度自动化控制,加速产品推广应用。
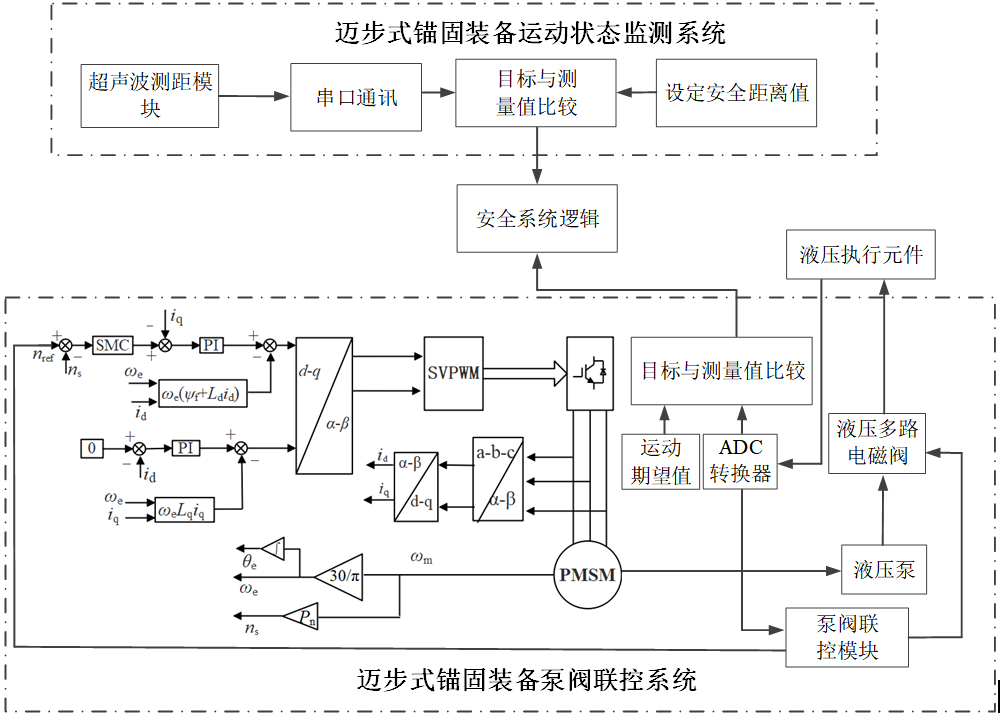
整套装备安全防护系统等级高
为保证本装置的各子系统在作业和移动的过程中不发生碰撞,利用超声波测距系统,且将该信息反馈至动力系统控制单元中,构成闭环的安全连锁系统,从而避免该装备与其他装备、人员发生碰撞等事故的发生。
在我国经济发展新形势下,社会生产和居民生活对煤矿资源的需求量持续增加,在科学技术的支撑下,煤矿开采也逐渐趋于机械化、智能化以及信息化方向发展,团队创新研发的全新的综掘工作面迈步式掘锚支协同机器人,应用智能化技术,可以提升开采作业的效率和质量,避免发生安全事故,确保企业生产安全、降低生产成本,对提升煤矿安全生产水平和保障煤炭稳定供应具有重要意义。
未来,中科深谷将继续研发创新,为综掘工作面迈步式掘锚支协同机器人系统提供更加高效、专业与技术支撑。

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)