
智能控制实验室方案|基于工业级直线电机一级倒立摆平台
2023-10-20
PART 01 背景
随着科学技术的飞速发展,智能控制系统在工业和国防的科研、生产中起着越来越重要的作用。为了培养具备掌握智能控制系统技术能力的人才,高等学校电子信息类和电气工程类专业开设了《自动控制原理》、《现代控制理论》、《智能控制技术》等课程。此类课程理论性和实践性较高,具有较强的系统性和工程性。为了解决学生对课程的理解停留在公式上,很难将理论与实践相结合,无法解决实际工程问题的问题,需要建设智能控制实验室,以培养满足产业发展需要的创新型人才。
PART 02 简介
该智能控制控制实验室以开源直线电机一级倒立摆平台为载体,采取虚实结合、循序渐进的教学方式,开展系统搭建、系统数学建模、系统性能分析和系统性能校正四个大板块的教学,可满足电子信息类和电气工程类专业《自动控制原理》、《现代控制理论》、《智能控制技术》等课程的基础教学、综合实践教学、创新教学内容,可支撑发表控制理论相关方向的高水平科研论文。实验室包括文化墙、分组实践区、创新实践及小组研讨、分享报告区和设备存储及准备区,是一个能为师生提供自主学习、创新、科研的开放空间载体,可有效促进学生理论知识的验证、转化与再深化。

实验室建设效果图
其中,文化墙内容涵盖智能控制技术的产业应用方向、控制技术的发展历史以及实验设备的操作规范。可根据高校特色产业应用进行定制设计,旨在将课本知识和实践内容与产业应用相结合,以培养学生的家国情怀。在分组实践区,学生按照要求完成指定的课程实践实验任务;在创新实践及小组讨论分享报告区,师生可以随时进行基于实验任务的学习、交流、分享活动,学有余力的学生也可以完成基于平台的创新性、高阶性实验;在设备存储及准备区,可以根据实验项目、实验室活动内容进行设备摆放和存储,增大实验室利用率。
PART 03 实验步骤
(1)系统认知,认知控制系统组成及原理倒立摆系统是一个摆杆支点在下、重心在上,通过电机带动支点沿直线运动,保持摆杆平衡的非线性自不稳定系统。倒立摆控制技术可应用于许多工业和工程产品中,如平衡车、腿足式机器人、人形机器人等。 开源直线电机一级倒立摆系统是由实时仿真控制系统、工业级高精密直线电机、角度传感器、摆杆和上位机组成。

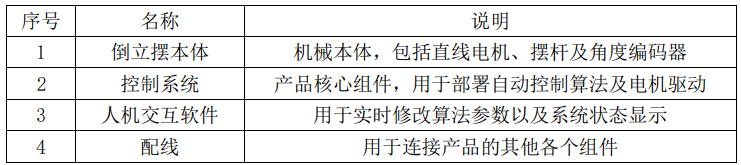
图 | 开源直线电机一级倒立摆系统实物图及组成说明
(2)系统数学建模,理论与实际结合,分析典型环节及其传递函数
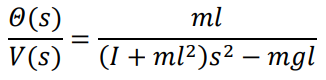
根据提供的滑块质量、摆杆质量、滑块速度阻尼参数、摆杆转动轴到重心的长度、电机导轨长度、摆杆围绕重心的转动惯量、重力加速度等数据,采用牛顿力学法和拉格朗日法建模,以电机加速度作为输入的一级倒立摆系统的传递函数为,
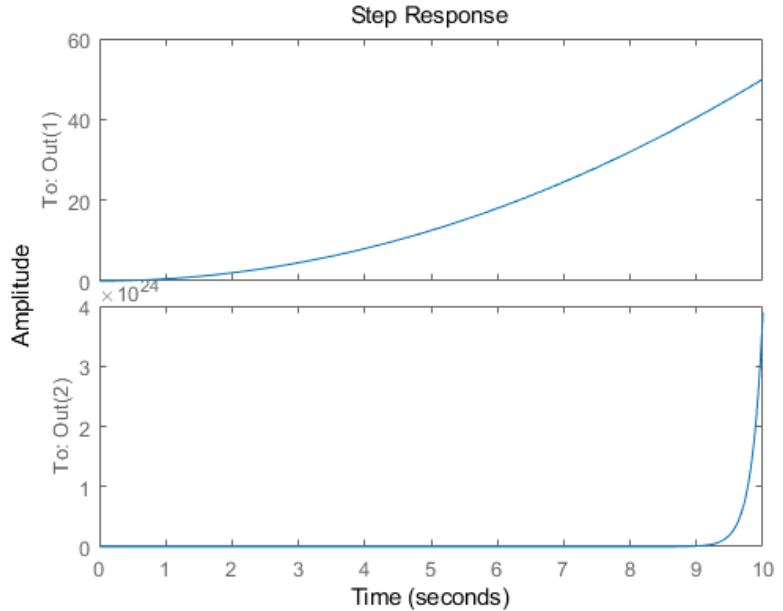
3)系统性能分析,研究系统的稳定性、稳态性和暂态性指标,研究系统的时域响应、根轨迹分析法和频率特性响应
在单位阶跃响应作用下,滑块位置和摆杆角度都是发散的,即系统是不稳定的。影响系统稳定的因素是闭环系统的极点位置,任意极点位于s右半平面,则系统不稳定。
(4)系统性能校正,虚实结合,对控制系统进行串联、局部校正和综合校正,从而能设计性能较好的控制系统
闭环系统瞬态响应的基本特性与闭环极点的位置紧密相关,如果系统具有可变的环路增益,则闭环极点的位置取决于所选择的环路增益。
此时,可以借助于SimScape工具进行校正前后虚拟仿真。
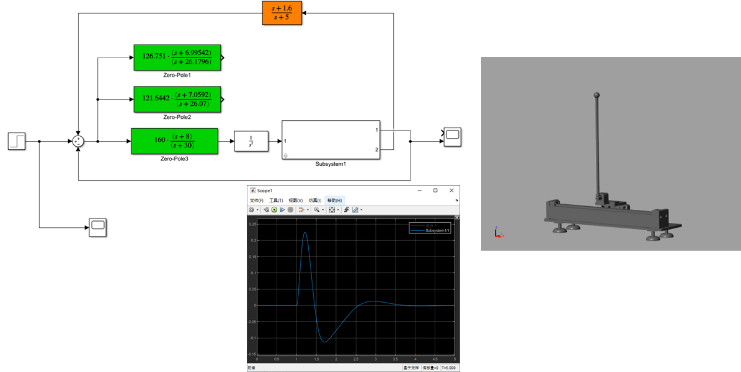
基于根轨迹法校正的基本思想,校正后系统的开环传递函数为,

校正并增大系统增益校正后的根轨迹及阶跃响应,
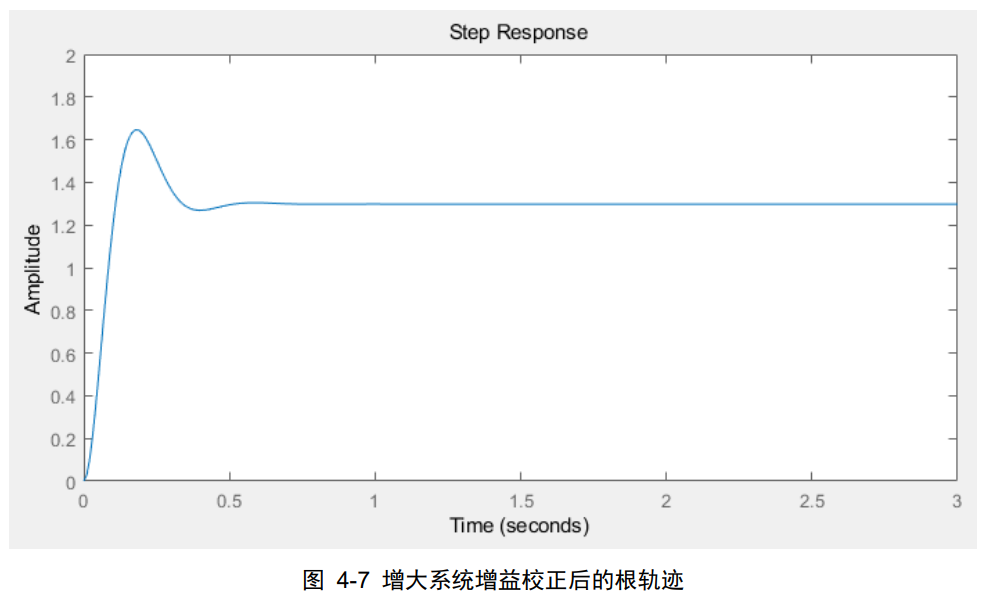
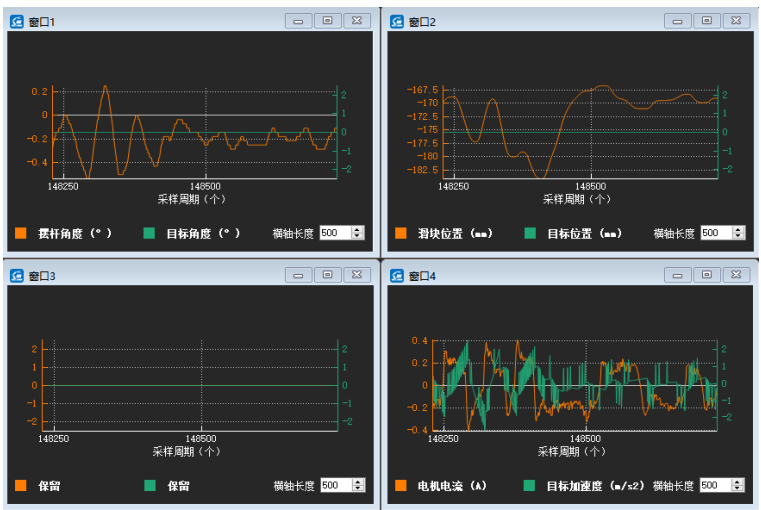
可以看出,系统在0.7s的时间内可以稳定,响应比较迅速,超调比较小。所有实验数据可以在上位机界面中观测。

PART 05 科研论文
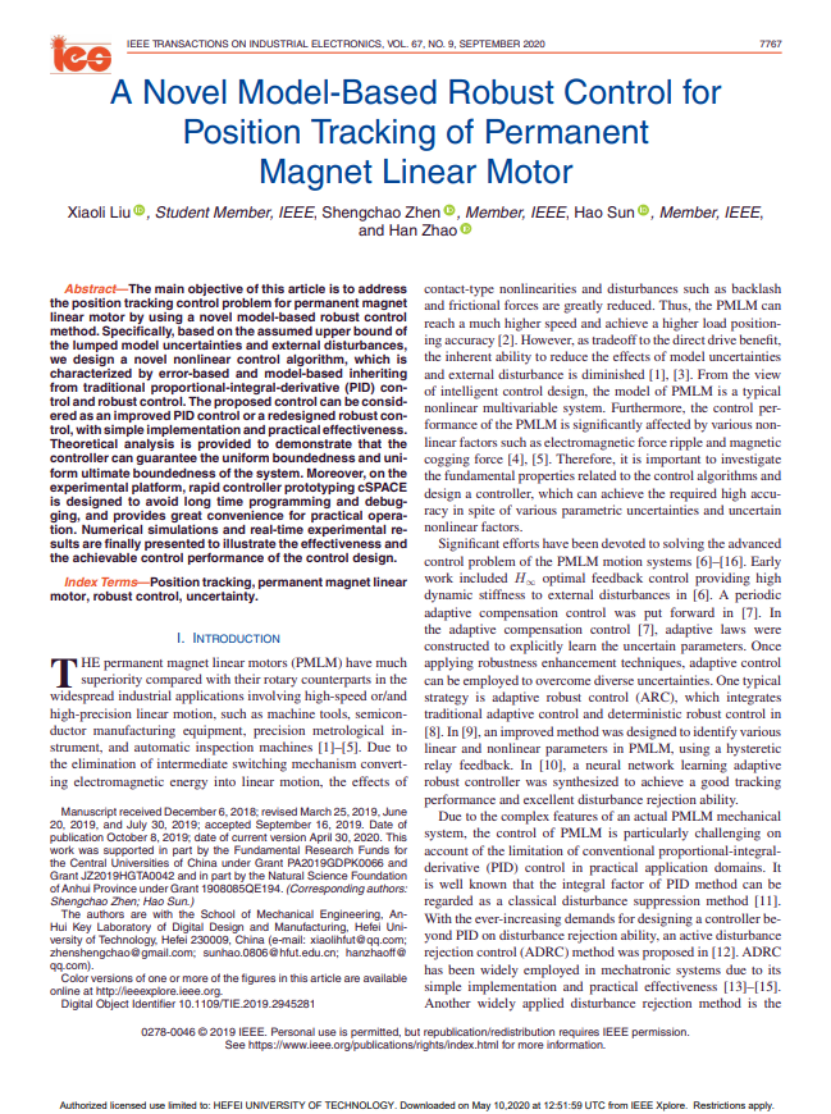
论文名称:A Novel Model-Based Robust Control for Position Tracking of Permanent Magnet Linear Motor
期刊索引情况:SCI
影响因子:8.236
收录于:IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
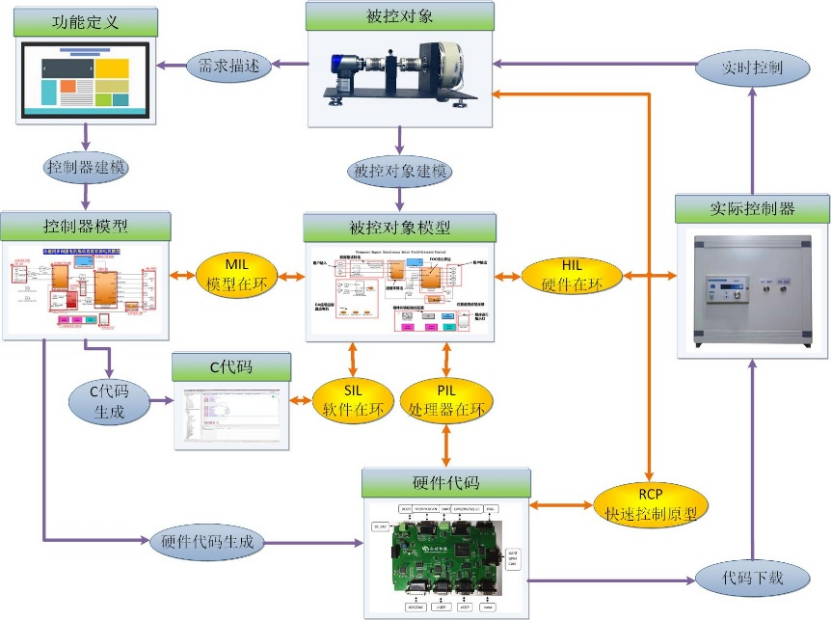
依托平台:基于CSPACE半实物仿真系统的永磁直线电机实验平台主要由永磁直线电机、CSPACE控制器、安装有MATLAB/Simulink的PC机、光栅位移传感器、直线电机驱动器组成。CSPACE控制平台结合MATLAB实时处理,基于MBD的开发方法,在MATLAB/Simulink中编写好图形化程序后,在CSPACE控制平台上通过自动代码生成软件(离线编程)直接转换为C代码,再将C代码编译后下载到DSP控制板上,将整个开发周期无缝地集成到一个单一的环境中,使仿真和测试之间的各个开发阶段可以反复多次运行,而无需频繁的重新调整。
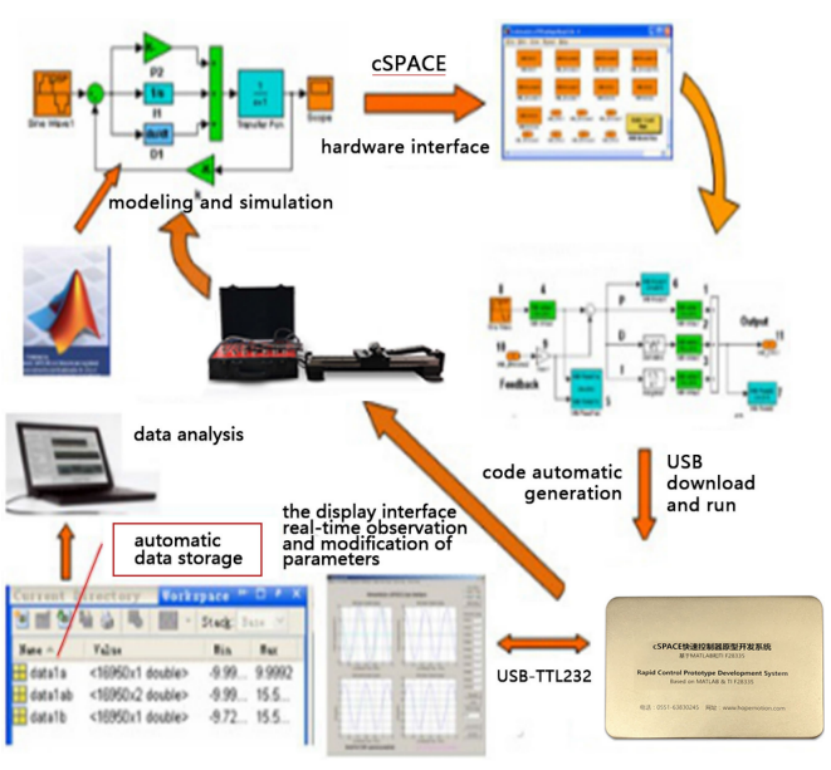

论文名称:A new PD based robust control method for the robot joint module
期刊索引情况:SCI
影响因子:6.823
收录于:MECHANICAL SYSTEMS AND SIGNAL PROCESSIN
G依托平台:基于CSPACE半实物仿真系统的关节模组主要由关节模组、CSPACE控制器、安装有MATLAB/Simulink的PC机、磁粉制动器组成。磁粉制动器可以给关节模组施加负载,提高系统中的不确定性,验证控制器的鲁棒性。CSPACE控制平台结合MATLAB实时处理,基于MBD的开发方法,在MATLAB/Simulink中编写好图形化程序后,在CSPACE控制平台上通过自动代码生成软件(离线编程)直接转换为C代码,再将C代码编译后下载到DSP控制板上,将整个开发周期无缝地集成到一个单一的环境中,使仿真和实验之间的各个开发阶段可以反复多次运行,而无需频繁的重新调整。

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)