
中科深谷倒立摆全系列教学实验平台——在智能控制领域的应用与挑战
2023-10-26
相对于传统的工科人才,未来新兴产业需要的是工程实践能力强、创新能力强、具备国际竞争力的高素质复合型新工科人才,他们不仅能运用所掌握的知识去解决现有的问题,还有能力学习新知识、新技术去解决未来发展出现的问题,这就需要不仅在某一学科专业上学业精深,而且还应具有学科交叉融合的能力。
为此,中科深谷结合新工科时代发展方向,致力于培养未来高水平工程技术人才,注重先进技术与传统学科知识的融合,把传统的倒立摆实验设备迭代为产品级,融合基于人工智能、强化学习等前沿知识,赋予产品新内涵,是一款典型的面向新工科教育的实验设备。
中科深谷推出的AI+控制原理、机器人工程、机器视觉、智能制造系列教学实验平台,将先进制造领域的新技术与实验教学相结合,面向院校自动化、机器人工程、智能制造、人工智能相关专业师生,提供从理论到实践,兼顾教学与研究的新工科实验对象模型;为用户提供丰富的课程课件教学资源,提供专业建设、课程规划、实验实训室建设解决方案;为用户提供建设更加面向未来的应用场景和应用环境。
PART 01
全系列倒立摆产品
赋能中高级产业人才培养
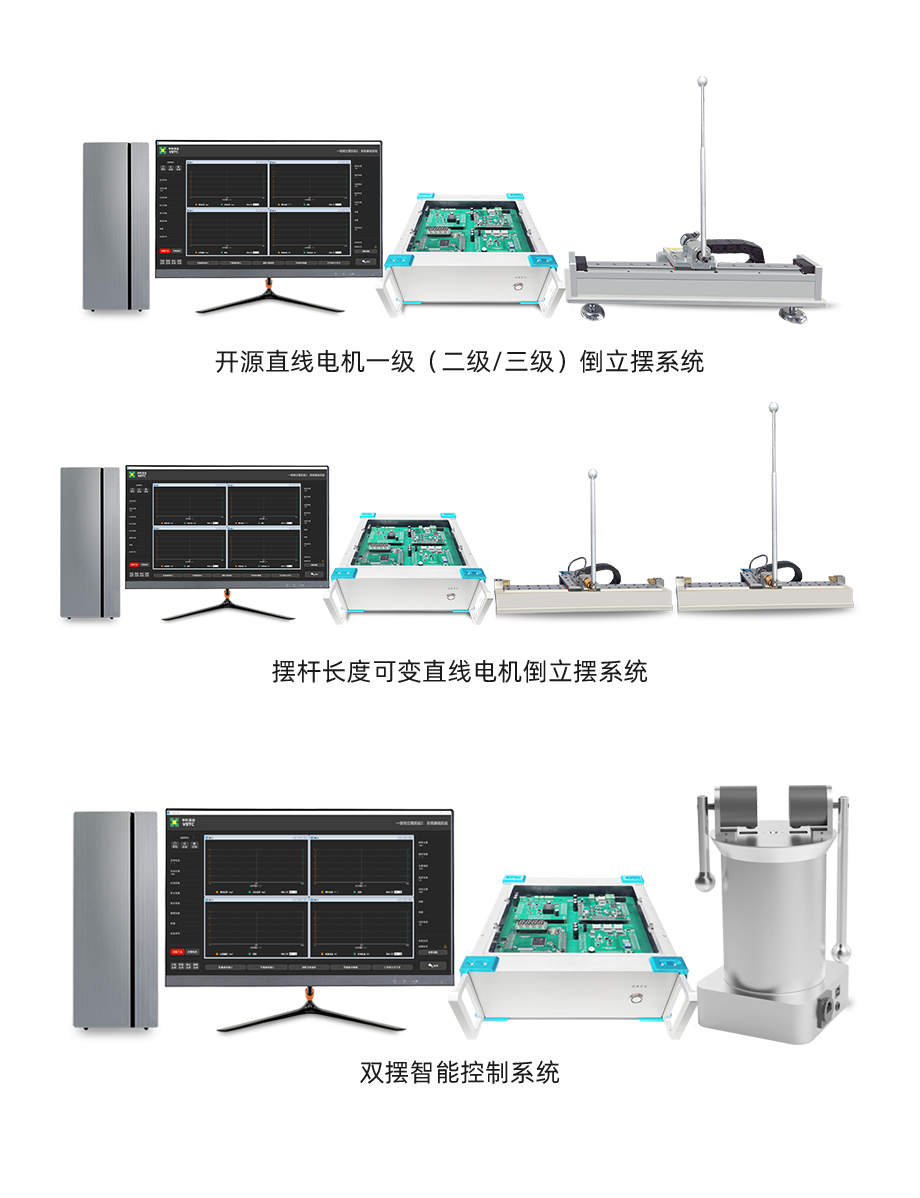
开源直线电机一级(二级/三级)倒立摆系统
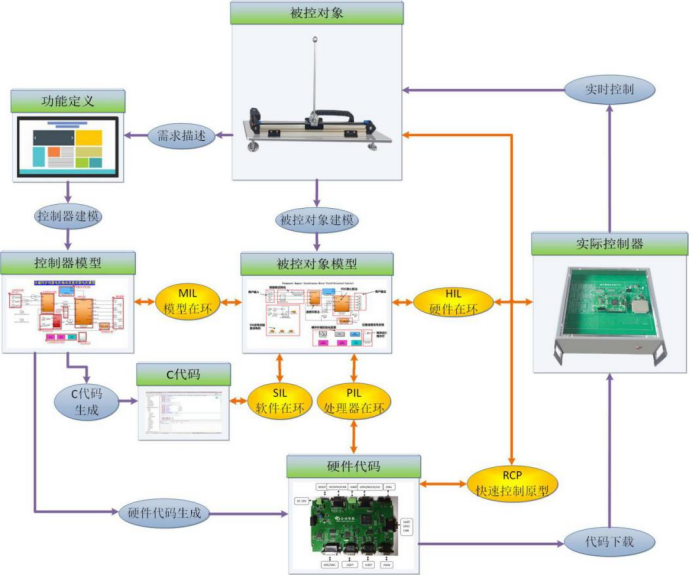
开源直线电机一级倒立摆(型号:LIP1)是由工业级高精密直线电机、角度传感器、摆杆、控制系统和上位机组成。控制系统是基于TITMS320F28335DSP和MATLAB/Simulink开发,结合计算机仿真和嵌入式实时控制技术,采用基于模型设计(MBD:Model-BasedDesign)开发方法,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,可以完成如LQR最优控制、模糊控制、神经网络控制等运动控制理论的相关实验。
直线电机摆杆可变倒立摆
直线电机摆杆可变倒立摆系统是基于开源直线电机一级倒立摆升级而成,同样由工业级高精密直线电机、角度传感器、摆杆、控制系统和人机交互软件组成,摆杆采用了可自由伸缩的电动推杆设计。控制系统同样是基于TITMS320F28335DSP和MATLAB/Simulink,以及基于模型设计(MBD:Model-BasedDesign)的开发方法,除完成如LQR最优控制、模糊控制、滑模控制、神经网络控制等运动控制理论的相关实验外,还可进行鲁棒、自适应等算法的研究。
双摆智能控制系统
双摆智能控制系统由倒立摆本体、控制系统、伺服系统、角度传感器、人机交互界面和开源算法资源包组成。其倒立摆本体采用一长一短双摆杆并联结构,可自由分解形成两种环形一级倒立摆;控制系统硬件基于DSP开发、软件基于Matlab/Simulink开发;伺服系统支持力矩和加速度两种控制模式;角度传感器使用绝对值编码器,采用CAN总线通信方式;开源算法资源包包含系统建模仿真、根轨迹分析、线性系统矫正、LQR、滑模控制、神经网络控制、强化学习控制等算法案例。中科深谷。
PART 02
全系列倒立摆产品
检验控制领域算法正确性和有效性的产品
01 产品特点
1. 产品级精致外观设计,工业级运动控制器配置、更加精准验证原理模型;
2. 支持开展经典控制理论实验、现代控制理论实验、智能控制实验;
3. 支持开展基于人工智能的深度强化学习控制实验;
4. 提供3D虚拟仿真实验软件,可独立开展倒立摆虚拟仿真实验;
5. 支持实物平台实验控制参数与虚拟仿真实验控制参数交互验证;
6. 工业互联设计理念、设备采用网络控制方式,提供远程控制实验方案。
02 实验项目
倒立摆系统建模和稳定性分析、频率响应法校正实验、PID控制实验、LQR控制实验、状态空间极点配置控制实验、根轨迹法校正实验、模糊逻辑控制实验、BP神经网络控制实验,深度强化学习训练实验、深度学习神经网络控制实验等。
03 适用课程
自动控制原理、现代控制理论、机械控制工程基础、智能控制、运动控制系统、计算机控制技术、机器人控制技术、模糊集理论与人工神经网络、人工智能的现代方法、Python语言程序设计基础、MATLAB/Simulink系统仿真、机器学习、强化学习等。
04 支持算法
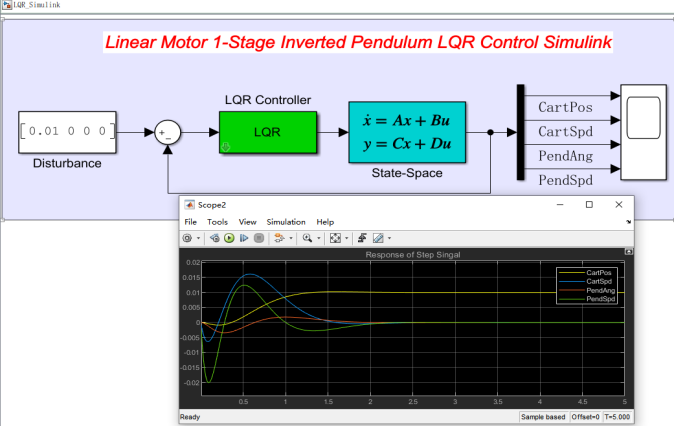
LQR算法

正弦跟踪PID控制算法
05 教学实验室

浙江大学智能控制实验室

深圳大学智能控制实验室

武汉理工大学智能控制实验室

山东理工大学智能控制实验室
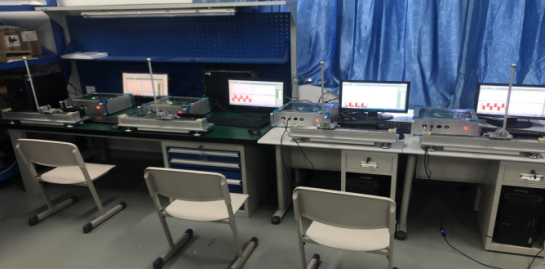
上海工程技术大学智能控制实验室

合肥学院智能控制实验室
06 科研论文
论文名称:A Novel Model-Based Robust Control for Position Tracking of Permanent Magnet Linear Motor
期刊索引情况:SCI
影响因子:8.236
收录于:IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
依托平台:基于CSPACE半实物仿真系统的永磁直线电机实验平台主要由永磁直线电机、CSPACE控制器、安装有MATLAB/Simulink的PC机、光栅位移传感器、直线电机驱动器组成。CSPACE控制平台结合MATLAB实时处理,基于MBD的开发方法,在MATLAB/Simulink中编写好图形化程序后,在CSPACE控制平台上通过自动代码生成软件(离线编程)直接转换为C代码,再将C代码编译后下载到DSP控制板上,将整个开发周期无缝地集成到一个单一的环境中,使仿真和测试之间的各个开发阶段可以反复多次运行,而无需频繁的重新调整。

倒立摆系列产品是高校新工科实践教学设备购置及更新改造的好选择!在控制工程中,倒立摆被用作研究和开发自适应控制系统的基础平台。而中科深谷全系列倒立摆平台的出现,为机器人在行走过程中和卫星在飞行中的平衡控制、姿态控制提供了研究基础和方向。倒立摆以它的稳定性和反馈控制机制,将算法研究成果切实的应用于机器人、军工、航天等领域,真正赋能高校的教学与实训,也通过开源化赋能高校学生创新与教师团队的科研需求。
中科深谷长期扎根于产业,聚焦机器人核心器件研发与产业化,同时立足教育、深化产教融合,致力于创新探索新技术与新工科产业人才培养融合和内在机理。为高校提供教学实训装备、实验室建设、产学研合作、师资培训、专业建设、课程资源开发、创新创业等一体化服务。未来,中科深谷将持续研发创新,将工业等产业装备设备的硬件、软件、算法等开源开放出来,努力推动教育与产业的融合发展!

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)