
智能移动机器人实验室方案|基于开源多传感融合移动机器人
2023-11-20
PART 01 背景
智能移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。随着全球物流行业的高速增长和智能技术的迅猛发展,移动机器人不仅可以在仓库内高效完成物料搬运任务,还可以在生产线上实现物流运输自动化,并在医疗、零售、酒店、建筑、城市安全、国防和空间探测等领域带来了革命性的变革。
移动机器人技术涉及到传感器技术、信息处理、电子工程、计算机工程、自动化控制工程以及人工智能等技术领域。目前,移动机器人领域的技术人才缺口较大。为了培养移动机器人领域的高素质人才,高等学校机器人类、智能制造类、人工智能类专业开设了《移动机器人技术》、《自主移动机器人》、《移动机器人定位与导航》等课程。此类课程理论性和实践性较高,具有较强的系统性和工程性。为了培养学生解决实际工程问题的能力,将理论知识应用到实际中,需要建设移动机器人实验室,为移动机器人的学习与开发提供创新空间。
PART 02 简介
智能移动机器人实验室是基于开源多传感融合移动机器人平台建设的“开放式综合创新工程应用实验室”,以深谷学院在线课程为主要教学资源,能够满足自动化专业、机器人工程专业、人工智能专业的移动机器人相关课程实践。可以完成如移动机器人建图与导航、自主导航与避障、轮廓检测、边缘检测、目标检测、特征检测、实时测距与定位等实验内容,能够支撑发表移动机器人相关方向的高水平论文。
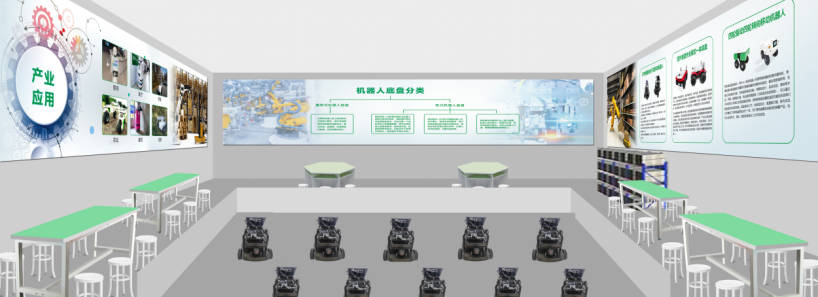 实验室建设效果图
实验室建设效果图
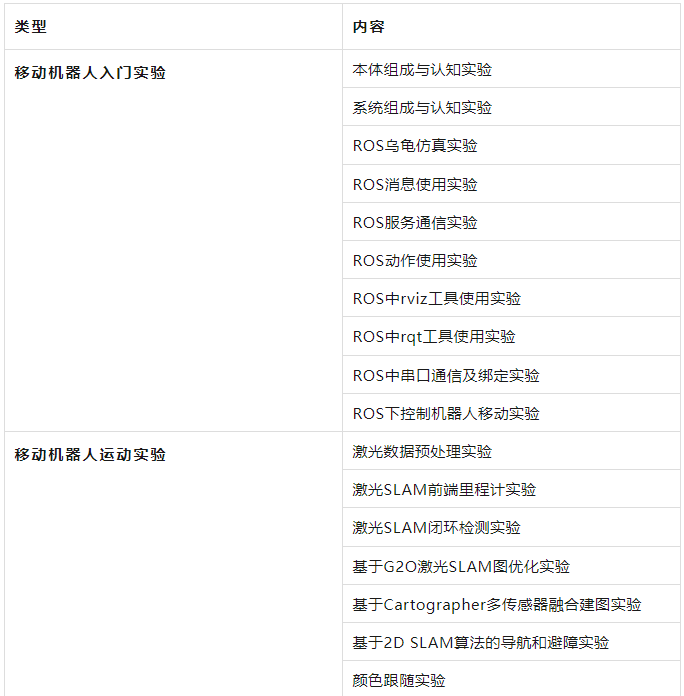
PART 03 实验教学安排
1、 移动机器人入门
移动机器人是自动执行工作的机器装置。硬件本体包括执行机构、驱动机构、传感系统和控制系统四个部分,软件组成包括ROS上位机软件设计与STM32下位机。ROS作为适用于机器人的开源操作系统,通过对ROS基本概念介绍及编程练习,了解ROS工作空间构建,学生在此基础上进行实操,可完成对机器人的认知及通信、移动、服务等内容。
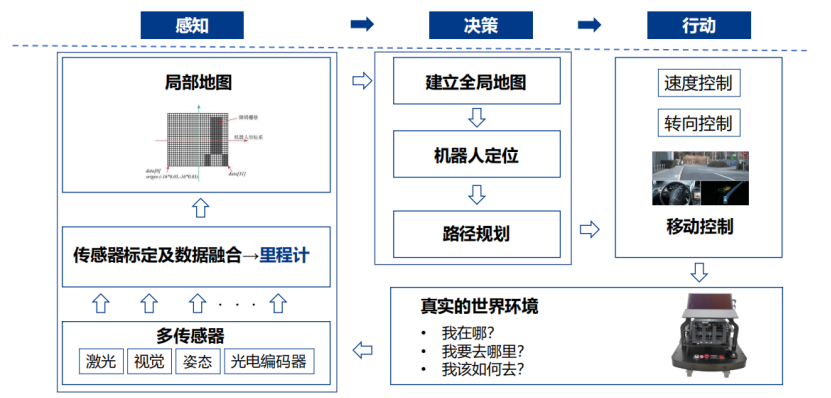
2、 移动机器人的感知、决策和行动
移动机器人的运动流程分为感知、决策和行动三个环节。通过多种传感器标定及数据融合后,根据收集到的数据建立全局地图,并做路径规划,后对机器人本体进行速度和转向控制,使其按既定路线移动。
PART 04 支持教科研内容
PART 04 支持教科研内容

PART 05 产品介绍
开源多传感器融合移动机器人平台是由移动底盘本体、控制系统、传感器系统等组成。底盛内置 ROS 和 MATLAB/Simulink 搭建的控制框架,采用差速控制模型,由基于 DSP 系列芯片自主开发的电机驱动器及轮毂电机作为动力来源。底盘本体安装有防碰撞传感器、20 激光雷达、九轴姿态传感器、深度相机。

控制系统由英特尔工控机提供高效的算力保障,结合车体显示器,键鼠套装,遥控手柄,可方便车体控制与调试,算法验证。采用 DC24V 15Ah 可保障车体4个小时的充足续航。平台支撑 MBD 开发方法,打通平台底层驱动搭建、算法部署、仿真测试和功能样机实地测试四大环节,为教学和科研提供优越的开放性支撑。
产品特点
1、支撑机器人建模仿真、机器人操作系统、传感器、机器人学、机器人控制以及科研领域的视觉算法验证实验和导航控制算法实验等。
2、车体采用模块化设计,易于安装,人机交互友好,使用便捷。
3、控制系统采用MATLAB/Simulink软件进行编程,用户可以更好更便捷地研究控制算法,并可支撑更高级的控制算法验证。
4、提供多传感器感知周围环境,2D激光、深度相机、超声波等。

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)