
中科深谷开源移动作业智能机器人平台——在机器人技术与系统领域的应用与挑战
2023-11-27
随着智能制造的深入发展,制造业工厂对于柔性物流的市场需求不断上涨。越来越多的制造企业开始关注移动机器人和机械臂、协作机器人等智能化工业设备的应用,在承担物料转运、配送、上下料等流程性工作的同时,能够取代人工完成一些简单、繁琐、重复时间长的流水线作业,或填补工作环境中的危险性岗位,以及对精密度要求较高的岗位需要。
而移动作业机器人作为建立在前期机器人技术之上,进一步开发得到的机器人品种。移动作业机器人可以在人为难以接受的环境下工作的工业机器人。通过传感器系统、移动机构、末端执行器等完成场景作业任务。
为了培养能够掌握机器人系统分析、设计、开发和应用技能的人才,中科深谷推出的AI+控制原理、机器人工程、机器视觉、智能制造系列教学实验平台,将先进制造领域的新技术与实验教学相结合,面向院校自动化、机器人工程、智能制造、人工智能相关专业师生,提供从理论到实践,兼顾教学与研究的新工科实验对象模型;为用户提供丰富的课程课件教学资源,提供专业建设、课程规划、实验实训室建设解决方案;为用户提供建设更加面向未来的应用场景和应用环境。
中科深谷结合新工科时代发展方向,致力于培养未来高水平工程技术人才,注重先进技术与传统学科知识的融合,把传统的机器人技术实验设备迭代为产品级,融合基于人工智能、强化学习等前沿知识,赋予产品新内涵,是一款典型的面向新工科教育的实验设备。
PART 01
开源移动作业智能机器人平台
赋能中高级产业人才培养

1、轻便型移动作业智能机器人(麦轮)

轻便型移动作业智能机器人(麦轮)平台由机器人控制系统、机电控制系统、多传感器模块、基于麦轮移动底盘、六自由度机械臂等组成。其中,机器人控制系统硬件基于英伟达控制器开发、软件基于ROS系统及Matlab/Simulink开发;机电控制系统硬件基于STM32开发、软件基于C语言开发;多传感器模块硬件含有2D激光雷达、深度相机、IMU模块,软件含导航定位算法包、机器视觉算法包;移动底盘轮系结构采用麦克纳姆轮,可实现前、后、左、右、斜行、旋转等全向移动;六自由度机械臂采用轻量化、一体化的智能驱动模组,末端安装吸盘及深度相机可进行机械臂抓取。
产品特点
1、支撑机器人建模仿真、机器人操作系统、传感器、机器人学、机器人控制等教学实验。
2、伺服性能优良,运动定位精度高,车体采用模块化设计,易于安装,人机交互友好,使用便捷。
3、控制系统采用MATLAB/Simulink软件进行编程,可以更好更便捷地研究控制算法,并可支撑更高级的控制算法验证
4、提供多传感器感知周围环境,2D激光、深度视觉、超声波等,更接近产品落地方案算法研究。
5、采用高性能计算机作为主控系统,可实现机械臂、底盘、视觉、导航、吸盘的控制,满足大量数据的处理运算需求。6提供丰富学习与教学资源,帮助学生快速入门和提高。
2、轻便型移动作业智能机器人(差速)
轻便型移动作业智能机器人(差速)平台是适用于机器人移动作业、机器人单体和多智能体控制,集环境感知、动态决策与规划、行为控制与执行、数据分析以及智能控制等多功能于一体的高性能教科研平台。其由机器人控制系统、机电控制系统、多传感器模块、移动底盘、轻型多自由度机械臂等组成。
其中,机器人控制系统硬件基于英伟达控制器开发、软件基于ROS系统及Matlab/Simulink开发;机电控制系统硬件基于STM32开发、软件基于C语言开发;多传感器模块硬件含有超声波传感器、红外传感器、2D激光雷达、AI人脸识别模块、AI语音模块,软件含有多传感器信息融合算法包、开源高精度导航定位算法包(精度3cm);移动底盘采用开放式分层结构设计,留有二次开发接口供加装其它类型传感器(如温湿度传感器、九轴姿态传感器、3D激光雷达、5G通信系统);轻型多自由度机械臂为6自由度高性能协作机械臂,末端安装吸盘及深度相机可进行机械臂抓取。

产品特点
1、支撑机器人建模仿真、机器人操作系统、传感器、机器人学、机器人控制等教学实验。
2、伺服性能优良,运动定位精度高,车体采用模块化设计,易于安装,人机交互友好,使用便捷。
3、控制系统采用MATLAB/Simulink软件进行编程,用户可以更好更便捷地研究控制算法,并可支撑更高级的控制算法验证。
4、提供多传感器感知周围环境,2D激光、深度视觉、超声波等,更接近产品落地方案算法研究。
5、采用高性能计算机作为主控系统,可实现机械臂、底盘、视觉、导航、吸盘的控制,满足大量数据的处理运算需求。
6、提供丰富学习与教学资源,方便快速入门。
3、基于深度学习视觉抓取移动机器人--基于深度学习(高级版)

基于深度学习视觉抓取移动机器人由驱控一体化移动机器人、协作机器人、避障传感器、2D激光雷达导航系统、含深度学习功能的视觉采集系统、柔性三指末端夹持器、基于5G网络的通讯系统、3D激光雷达导航系统和RTK定位系统等组成,平台融合了多种传感器数据采集、数据分析以及智能控制于一体,可以支持与部署当前流行的深度学习应用,是高级机器人研究和开发的综合性开源平台。
产品特点
1、采用工业结构设计,符合工业标准,支持多种环境下工业场景应用。
2、基于模块化设计,拆装便捷、结构紧凑、功能丰富。
3、六轴机械臂、底盘、视觉、导航系统均采用自主开源化的设计,可自由进行单独或融合算法研究。
4、平台同时支撑MATLAB和ROS联合进行算法开发研究,适用范围广。
5、提供大量的Demo算法及实验案例,供用户在更深层次上的学习和研究。
6、平台开放底层,完全开源。预留开发接口,可进行集成应用,提供全方位的技术支持,能很好支撑工业应用。
7、使用高性能计算机作为主控系统,可实现机械臂、底盘、视觉、导航系统、夹爪的控制,满足大量数据的处理运算需求。
8、可用于工业生产、生物和医学实验室自动化、智能物流仓储、智能识别、安防巡检等研究及应用。
4、开源四驱四转移动作业智能机器人

开源四驱四转移动作业智能机器人由四驱四转移动底盘、协作机械臂、避障传感器、2D激光雷达导航系统、含深度学习功能的视觉采集系统、柔性三指末端夹持器、基于5G网络的通讯系统、3D激光雷达导航系统和差分北斗定位系统等组成,平台融合了多种传感器数据采集、数据分析以及智能控制于一体,可以支持与部署当前流行的深度学习应用,是高级机器人研究和开发的综合性开源平台。
产品特点
1、采用工业结构设计,符合工业标准,支持多种环境下工业场景应用。
2、基于模块化设计,拆装便捷、结构紧凑、功能丰富。
3、六轴机械臂控制、底盘控制、视觉识别与定位、导航系统均采用自主开源化的设计,可自由进行单独或融合算法研究。
4、平台同时支撑MATLAB和ROS联合进行算法开发研究,适用范围广。
5、提供大量的Demo算法及实验案例,供用户在更深层次上的学习和研究。
6、平台控制部分完全开源。预留开发接口,可进行集成应用,提供全方位的技术支持,能很好支撑工业应用。
7、使用高性能计算机作为主控系统,可实现机械臂、底盘、视觉、导航系统、夹爪的控制,满足大量数据的处理运算需求。
8、可用于工业生产、生物和医学实验室自动化、智能物流仓储、智能识别、安防巡检等研究及应用。
PART 02
协作机器人+移动机器人
完美集成的全场景工业智造产品
中科深谷移动作业智能机器人是一款协作机器人与中科深谷移动机器人完美集成的产品,通过多合一控制系统可灵活控制协作机器人、移动底盘、视觉、末端夹爪等设备,省却繁杂操作,能够自主定位导航,安全地运行在工厂中,独立执行各种任务,如生产线自动上下料 、老化测试上下料 、协同装配等,同时可与人类及其他机器人设备协同,执行各种复杂任务。
一、应用案例

基于深度学习的视觉抓取
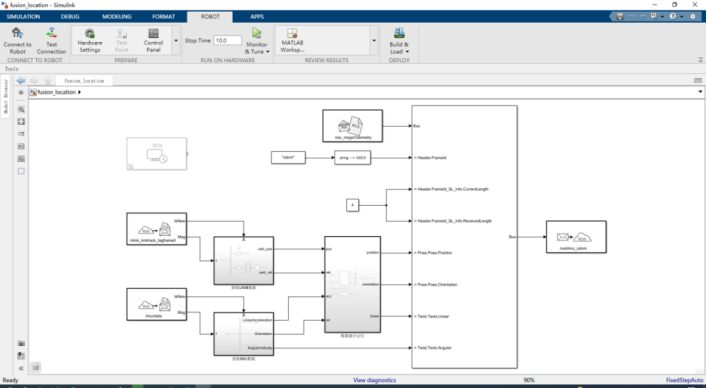
Matlab/Simulink模型设计
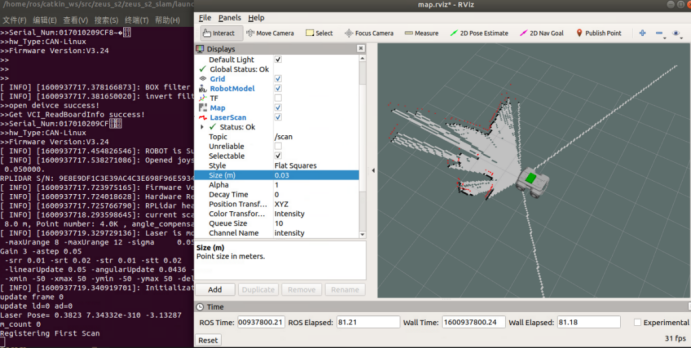 ROS下的SLAM定位导航
ROS下的SLAM定位导航
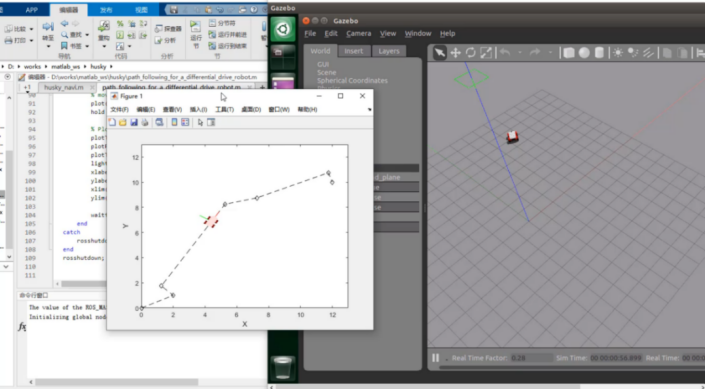 Matlab/Simulink与GAZEBO联合仿真
Matlab/Simulink与GAZEBO联合仿真
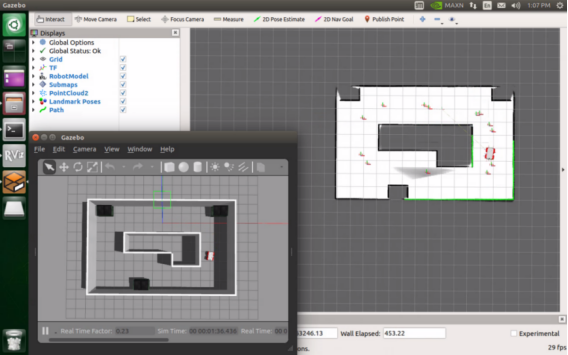
ROS下定位导航仿真
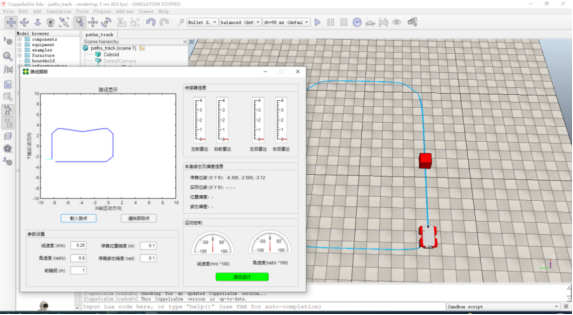 Matlab/Simulink与V-Rep联合仿真
Matlab/Simulink与V-Rep联合仿真
二、应用专业
车辆工程、机器人工程、机械电子工程、机械工程、自动化、智能制造工程。
三、本科和研究生教学课程
机器人学、机器人建模与仿真、自动控制原理、机器人操作系统、计算机控制技术。
四、支撑科研方向
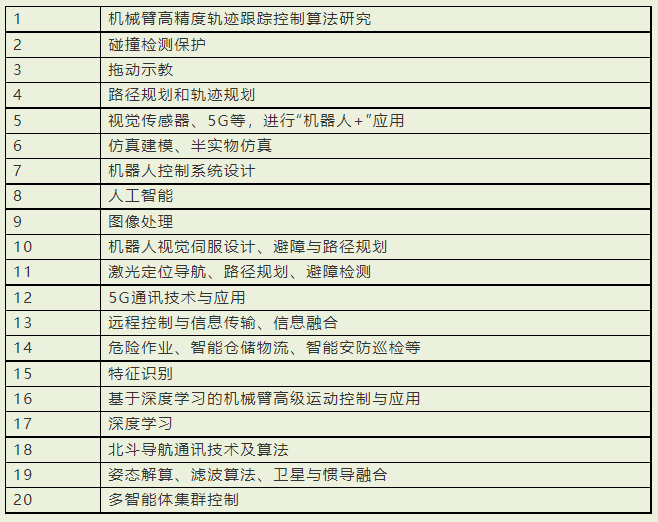
移动机器人实验
1、入门实验
本体组成与认知实验
系统组成与认知实验
ROS乌龟仿真实验
ROS消息使用实验
ROS服务通信实验
ROS动作使用实验
ROS中rviz工具使用实验
ROS中rqt工具使用实验
ROS中串口通信及绑定实验
ROS下控制机器人移动实验
2、中级实验
运动学正解实验
运动学逆解实验
本体结构建模实验
避障传感器数据读取实验
MATLAB联合ROS控制移动实验
Simulink联合ROS控制移动实验
MATLAB获取激光雷达数据实验
MATLAB生成栅格地图实验
3、高级实验
2D雷达激光数据预处理实验
激光SLAM前端里程计实验
激光SLAM闭环检测实验
基于G2O激光SLAM图优化实验
基于Cartographer多传感器融合建图实验
基于2D SLAM算法的导航和避障实验
3D雷达基于PCD点云地图生成栅格地图实验
3D激光SLAM实验
3D激光SLAM融合GPS信息实验
基于3D SLAM算法的导航和避障实验
协作机器人实验
1、运动学实验
运动学基本知识实验
坐标系和DH设定实验
ROS机械臂建模实验
MATLAB快速正运动学仿真实验
MATLAB快速逆运动学仿真实验
ROS机械臂控制实验
Simulink正运动学控制机械臂实验
Simulink逆运动学控制机械臂实验
2、夹持器实验
夹持器结构建模实验
ROS下夹持器仿真实验
MATLAB联合ROS控制夹持器实验
视觉伺服实验
场景应用实验
相机内参标定实验
手眼标定实验
图像采集实验
色块识别实验
图像标注实验
数据集制作实验
模型训练实验
实时目标检测实验
六、项目申报
1、安徽省重点研究与开发计划——高新技术专项基于视觉伺服移动作业机器人关键技术研发与产业化
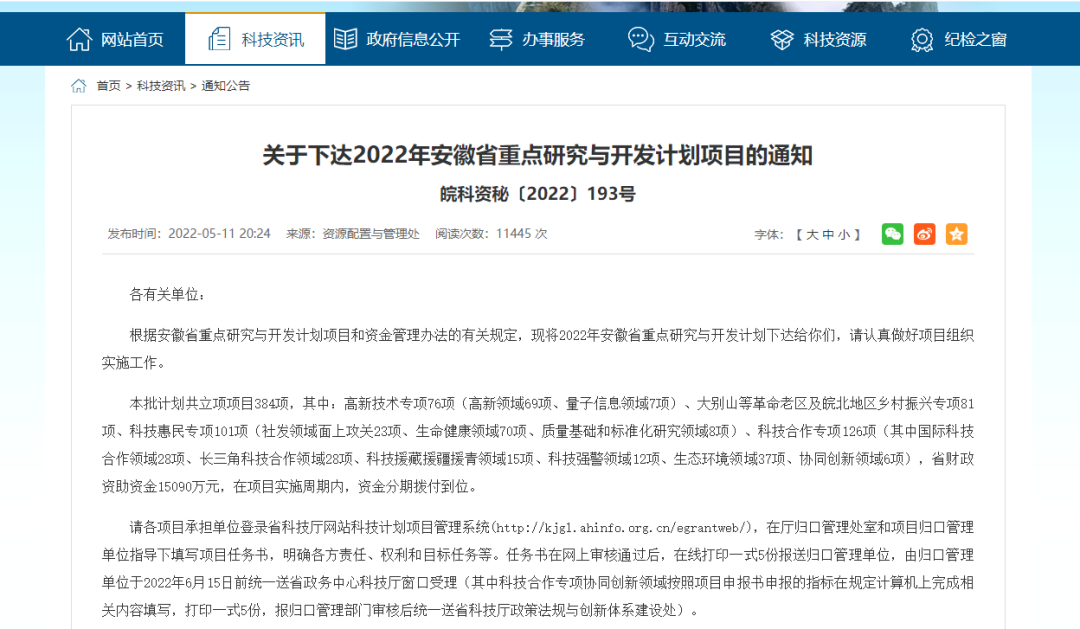
2、安徽省科技重大专项——公开竞争类面向密植果园农业机器人高效采摘关键技术研究及应

3、合肥市关键共性技术研发者重大科技成果工程化项目智能移动作业机器人研发与产业化

开源移动作业智能机器人平台是高校新工科实践教学设备购置及更新改造的好选择!
目前移动作业机器人已是高端生产力工具,是先进机器人技术,在3C、半导体等高端制造业场景实现大规模落地。
而中科深谷开源移动作业智能机器人平台的出现,通过智能设备的集成,最大程度的减少设备对环境的改造要求,从而完成在各种场景中完成特定的作业,并将移动机器人路径规划与机械臂的协同控制,多机器视觉系统与复杂系统的控制等研究成果切实的应用于物流行业,以及汽车汽配、供应链、新零售、3C电子、快递等领域,通过软件、硬件、算法开源赋能高校学生创新学习与教师团队的科研需求。
中科深谷长期扎根于产业,聚焦机器人核心器件研发与产业化,同时立足教育、深化产教融合,致力于创新探索新技术与新工科产业人才培养融合和内在机理。为高校提供教学实训装备、实验室建设、产学研合作、师资培训、专业建设、课程资源开发、创新创业等一体化服务。未来,中科深谷将持续研发创新,将工业等产业装备设备的硬件、软件、算法等开源开放出来,努力推动教育与产业的融合发展!

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)