
2024中国人形机器人开发者大会暨第三届张江机器人全球生态峰会圆满落幕|中科深谷首席技术专家陈现敏博士受邀作主题报告
2024-06-07
6月6日,2024中国人形机器人开发者大会暨第三届张江机器人全球生态峰会在上海·浦东·张江科学会堂召开。本次峰会由上海市经济和信息化委员会、上海市浦东新区人民政府指导,人形机器人(上海)有限公司、上海张江(集团)有限公司主办,上海浦东康桥(集团)有限公司(张江机器人谷)、立德机器人平台(机器人大讲堂)、《机器人技术与应用》杂志社、机器之心承办。

本次形机器人开发者大会是国内首个围绕机器人开发者为核心举办的行业盛会,目标是聚焦人形机器人+具身智能重点产业方向,为人形机器人开发者搭建分享交流的平台,共同探讨人形机器人和具身智能等产业链协调发展的新趋势、新导向、新技术、新应用。
中科深谷是致力于人工智能先进技术、高端智能装备研发与产业化应用的高科技公司。深谷长期坚持自主创新,重视基础研究,核心产品“基于实时仿真控制系统(CSPACE)”是直接对标欧美一线品牌的国产化替代。并逐步应用在康养、工业、农业、民生及教育多个领域,为用户提供了专业解决方案和优势服务。

围绕CSPACE,在伺服电机驱动器、运动控制系统、移动机器人、机械臂、移动机械臂视觉作业机器人、室内外导航、3D视觉和深度学习、人形机器人、采用机器人的高端装备等技术领域,均进行了深耕。产品和技术已经在600多所高校、500多家企业得到应用。
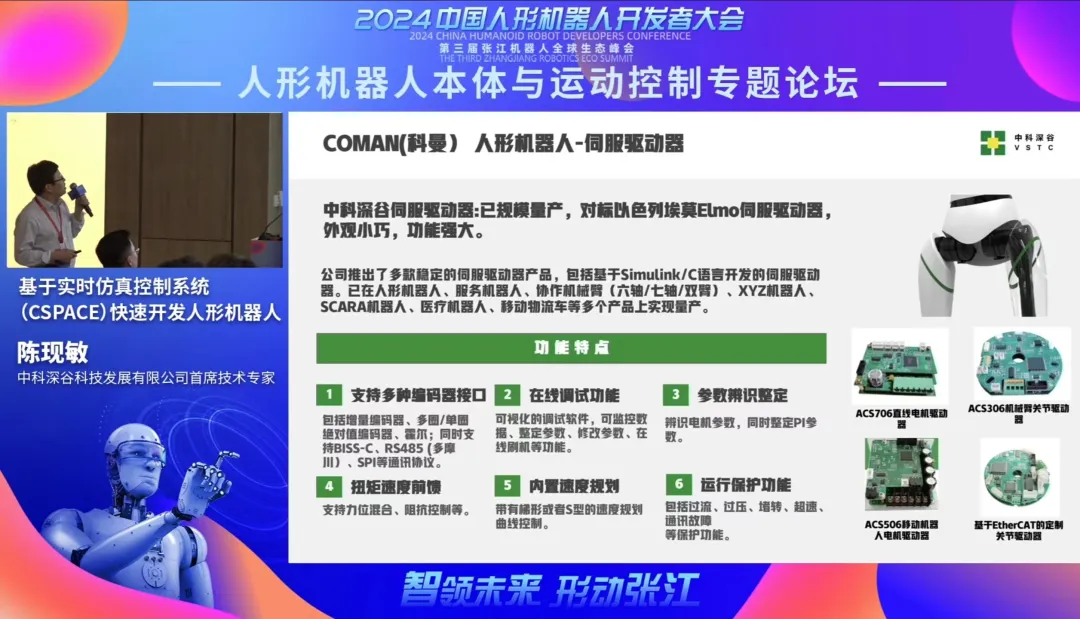
中科深谷首席技术专家陈现敏博士受邀出席大会并作人形机器人本体与运动控制专题论坛主题报告《基于实时仿真控制系统(CSPACE)快速开发人形机器人》。


陈现敏博士在报告中首先介绍了人形机器人驱动和运动控制技术特点以及基于实时仿真控制系统(CSPACE)开发人形机器人的优势,并解决了两大问题:第一,半实物仿真中快速控制原型的搭建,完成对真实被控制对象的控制;第二,通过高精度建模模拟被控对象,实现控制、功率等硬件在环仿真控制。

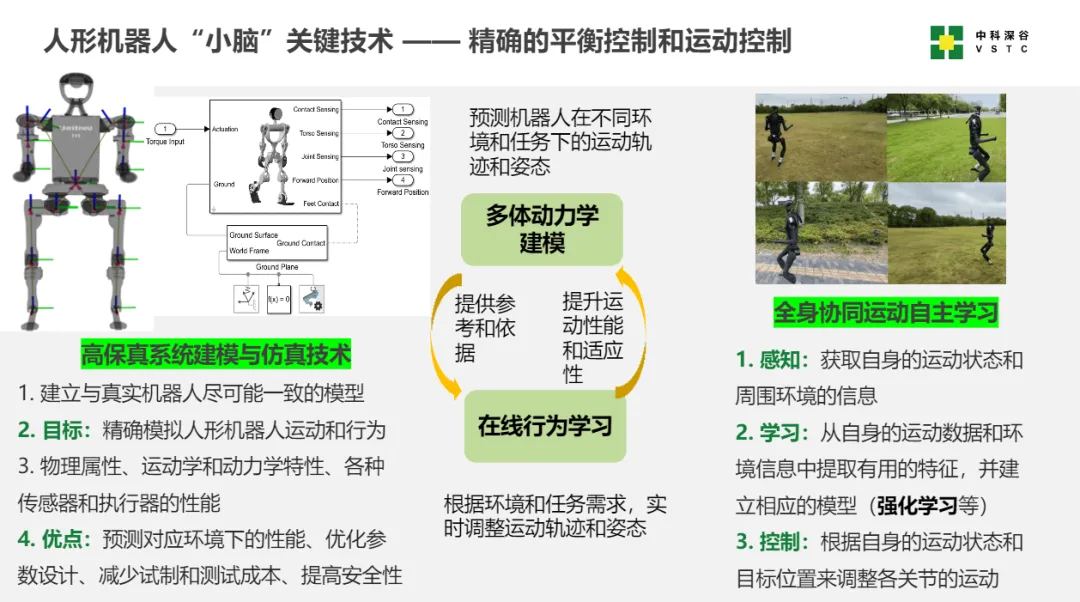
陈现敏博士表示,打造人形机器人的“小脑”,需要搭建运动控制算法库,建立网络控制系统架构、需要提供本体的算力与算法。通过实时仿真技术可以使其可以面向特定应用场景,构建仿真系统和训练环境,加快技术迭代速度,降低创新成本。
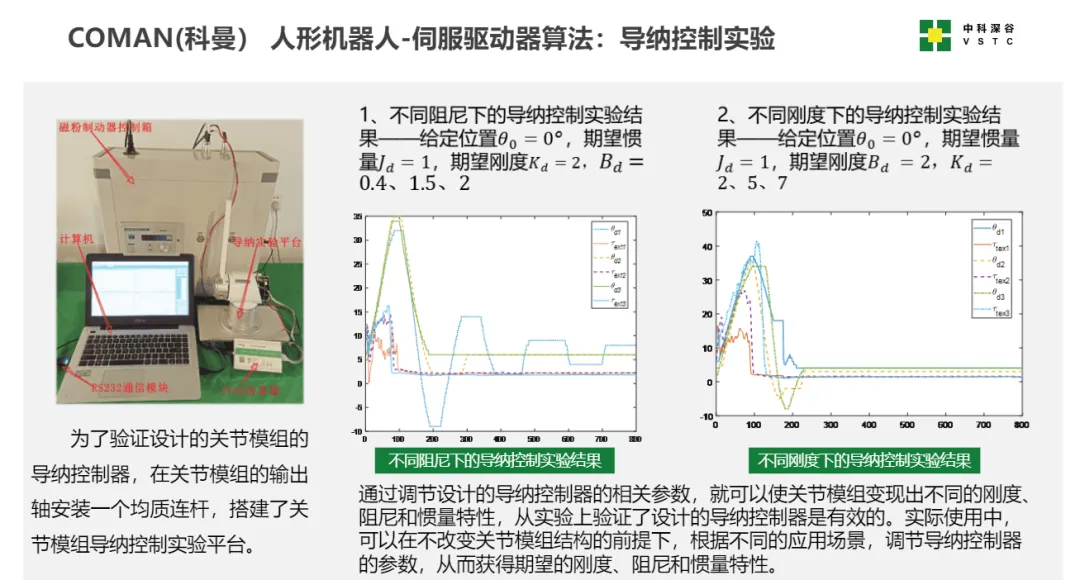
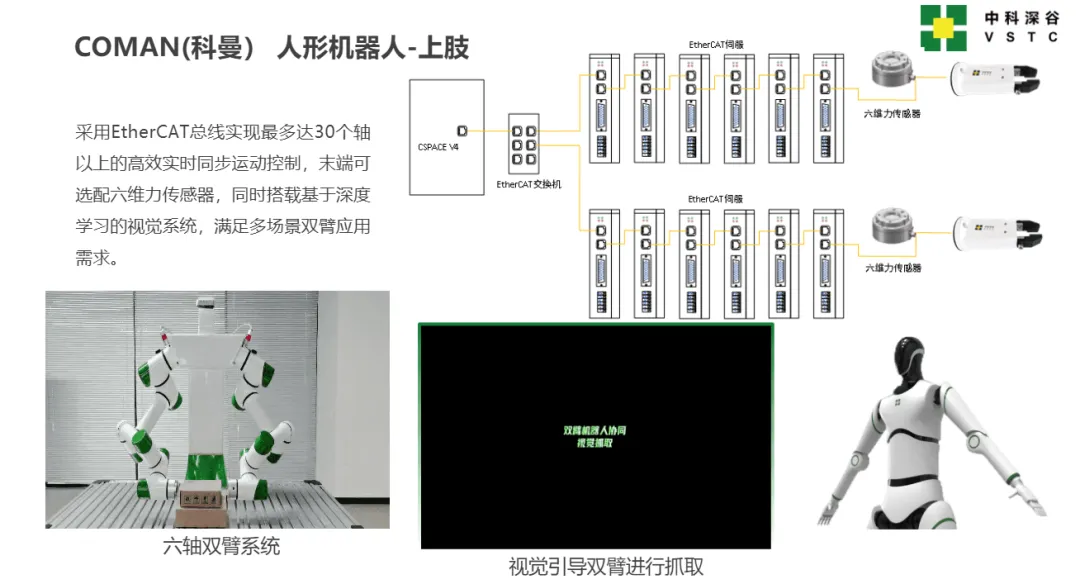
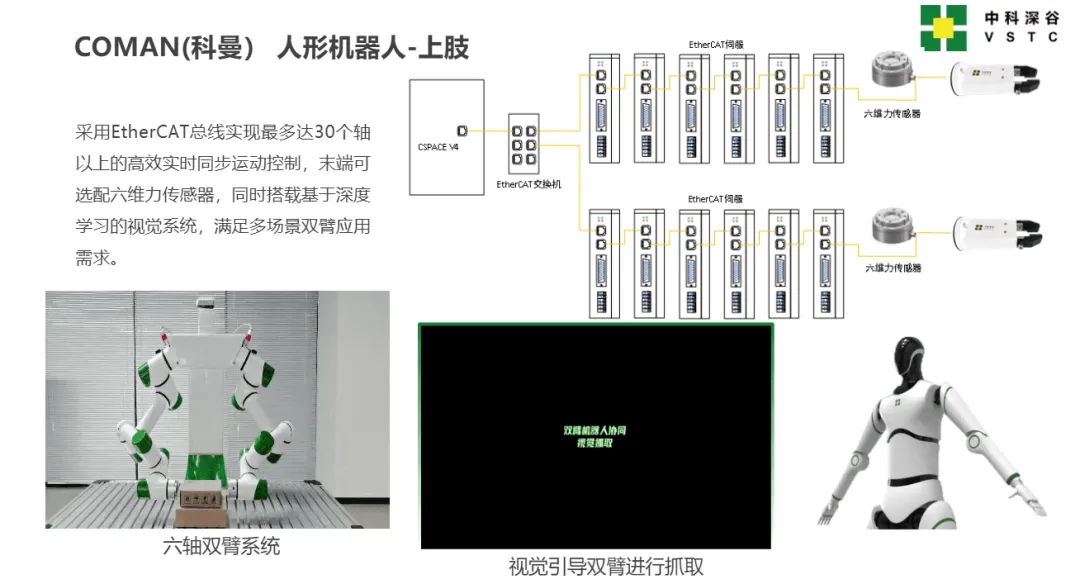
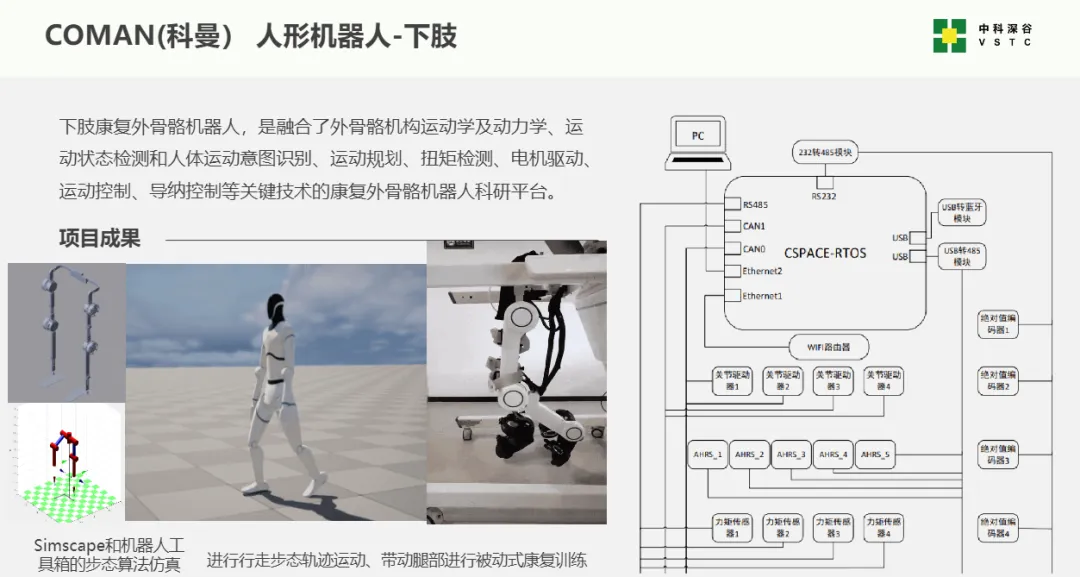
最后,陈现敏博士详细的介绍了CSPACE如何赋能人形机器人核心零部件开发与测试、人形机器人上、下肢运动控制开发与测试、人形机器人整机智能化开发与应用。

热烈祝贺2024中国人形机器人开发者大会暨第三届张江机器人全球生态峰会圆满落幕!未来,在政策、技术、生态多维度赋能下,中科深谷将围绕本体结构、智能算法、应用场景、量产落地等关键领域,与中科深谷众多生态伙伴联合,共同加速推动通用人形机器人的市场潜力释放。

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)