
中科深谷新品发布:轻型力控机械臂
2024-10-15
机械臂作为智能机器人领域的一个重要分支,正在迅速发展并展现出巨大潜力。它们通过集成先进的感知系统、决策规划、控制技术以及多模态交互能力,能够更好地理解和互动复杂的环境,执行各种任务。
中科深谷基于CSPACE实时仿真控制研发了一款全新的轻型力控机械臂,该机械臂是一款专为大模型以及机载设计的机械臂新物种,具备轻型、高灵活度及全关节力控等多重优势,可完美适配,适用于大模型、具身智能、算法验证等科研环境。
一、产品配置
01 机械臂本体
机械臂本体为6自由度,额定负载2Kg,峰值负载3kg,臂展620mm,本体自重3.3Kg,结构紧凑,易于安装。机械臂具有碰撞保护功能,工作安全适合人机协同的场合。
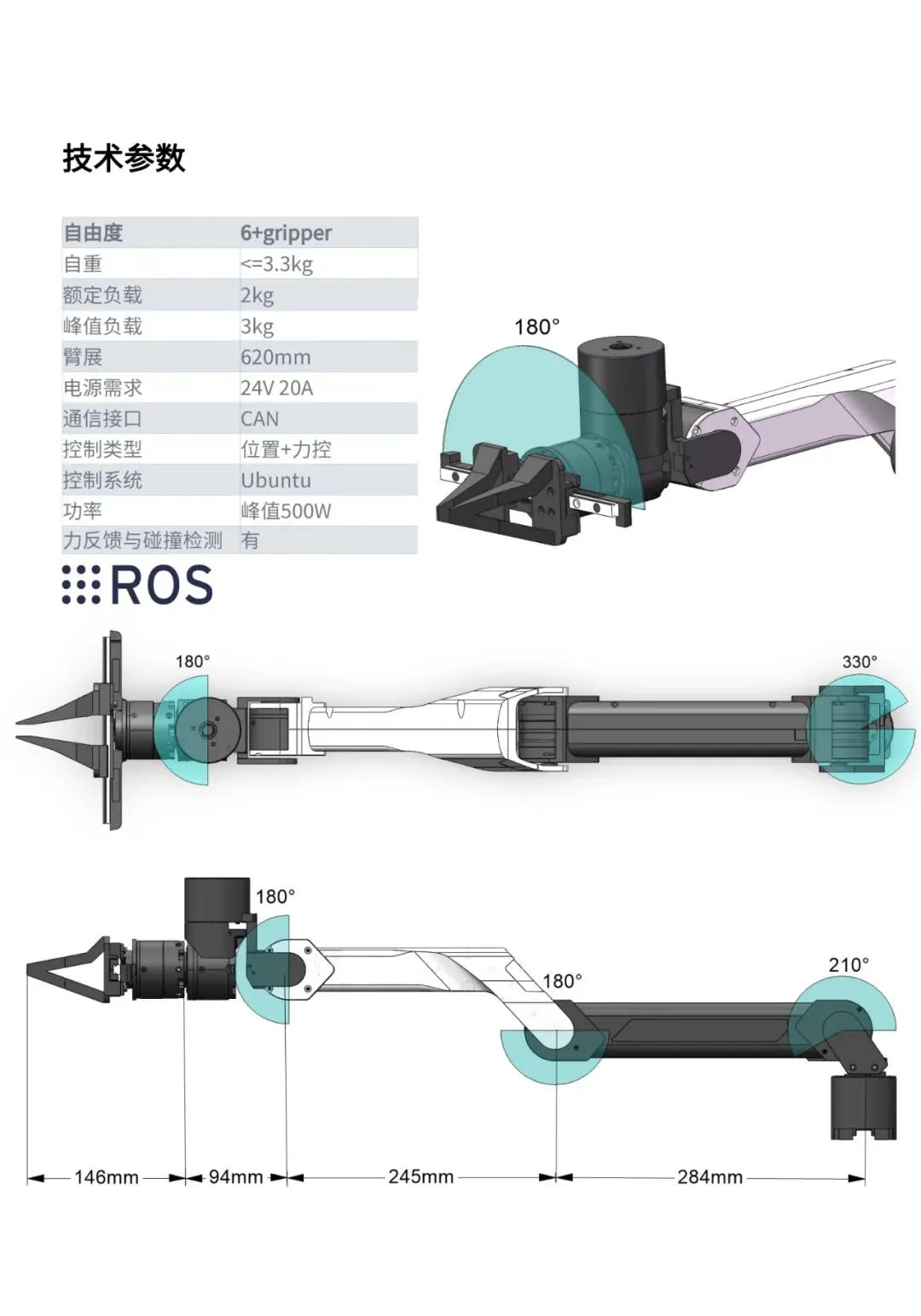
在生态环境上,轻型力控机械臂支持ROS 及 配套moveit,非常适用于开发者进行二次开发及算法部署。
在工作半径方面,轻型力控机械臂的工作半径为620mm,这个较长的操作范围使得X5在有限的空间内具有更高的工作效率和灵活性。在下探距离方面,X5机械臂的下探距离为500mm,可以适应各种高度的操作需求。
在硬件配置上,为了数据安全,采用了双编码器设计,可保证即使在掉电的情况下轻型力控机械臂数据也不会丢失。这确保了机械臂的精确定位和运动控制,同时也为生产过程中的数据安全提供了保障。
在数据同步方面,轻型力控机械臂具有高速低延时的数据同步功能,可实时地将控制指令和传感器数据传输到机械臂的控制器中。这使得操作者可以迅速地对机械臂进行精确控制和调整。
02 机械臂控制系统
控制系统四核ARM Cortex-A55架构和MATLAB/Simulink开发,结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是用于进行基于模型设计(MBD:Model-Based Design)控制系统开发的教学和科研产品。

图 | EtherCAT通信版控制系统
控制系统技术参数

01 控制器性能强悍
02 运算性能强
03 存储空间大
04 支持EtherCAT工业总线
05 控制周期可达1ms
06 提供更丰富的动力学控制实验
二、产品优势
1、超轻量高灵活
超轻型力控机械臂X5将整体附带夹爪重量控制在了3.3kg以内。为了保障机械臂的灵活性,采用薄壁铝合金机身,经历多次迭代优化,保证强度的同时降低了整机重量。
2、自重轻高负载
超轻型力控机械臂X5在将自重降低至3.3kg以下的同时,实现了额定负载可达2kg,峰值负载可达3kg。作为市面上唯一一款可搭载小型四足机器人的力控机械臂,X5不仅非常轻便、负载充足,而且可以适配绝大多数桌面及抓取任务,其臂展对标人体手臂,可适配于多种应用场景。
3、全力控高感知
具备感知能力与力控能力是机械臂升级为智能机械臂的第一步,也是当前机械臂发展的重要趋势之一。超轻型力控机械臂X5通过感知和反馈每个关节的力和扭矩,实现精确的关节控制和力矩控制,可在处理敏感和易碎的物品时得心应手。
4、具身智能
具身智能的开发旨在创造能够在现实世界中有效执行任务的AI系统。X5无论灵活度、臂展、精度都是对标人的手臂,不仅兼具自重轻、力控效果好、无需冗余沉重底座设备、部署方便,且环境适应性强、可实现精细操作,极其方便研究人员进行部署开发。
三、MBD开发方式
采用MBD进行机械臂开发设计,特色如下:

01 将仿真建模与实际研发产品结合,引入高可靠性的实时软硬件环境做技术保障。
02 从需求捕获到设计、实现和测试,系统模型开发和测试始终占据开发流程的核心。
03 追求持续不断的创新,将客户所追求的前沿创新技术与安全、可靠的核心功能有机结合。
四、配套系统及软件支持
01 基于MATLAB/Simulink的仿真建模与控制
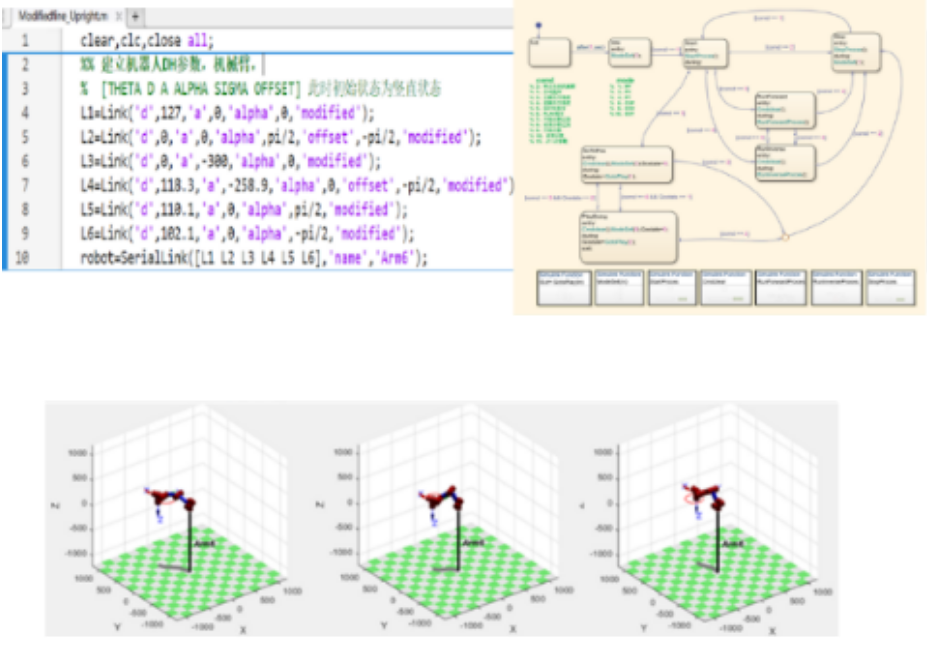
图|基于MATLAB/Simulink的仿真建模与控制
02 上位机软件
友好的交互界面,开放的通讯协议,丰富的功能指令模块,可自定义数据图形化显示、数据保存、在线调参。
 图|上位机软件界面
图|上位机软件界面

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)