
深谷开源室内空地协同无人集群系统,实现异构智能体跨域协同控制
2025-06-17
跨域智能无人集群系统是由多个不同种类、不同功能、分布在不同物理域的无人平台组成的群体系统,通过信息交互、智能决策与协同控制,可共同完成单一平台或单一域平台难以完成的复杂任务。在军事上,跨域无人集群系统可执行侦察监视、协同打击、物资投送等多种作战任务,提升作战效率、减少人员伤亡;在民用领域,可赋能物流运输、农业监测、工业巡检等多个场景,对经济社会发展具有重要意义。开展相关领域研究已成为突破异构平台协同控制核心技术、培养复合型创新人才、加速智能无人系统落地的战略需求。
智脑赋能开源室内空地协同无人集群系统
中科深谷核心产品“异构协同智脑系统”为复杂场景下的异构群体智能机器人协同作业提供了解决方案。该系统不仅为单个机器人本体赋予高精度控制的“敏捷小脑”,也为群体机器人构建协同作业的“智能大脑”,实现了异构机器人“大小脑”的协同控制。
依托该智脑系统,中科深谷推出了开源室内空地协同无人集群系统。该系统是一个集成了高精度室内定位技术与多智能体跨域协同控制技术的综合性实验平台,配备了多种异构智能体,如无人机与无人车等,可满足不同规模异构体集群的协同任务需求。
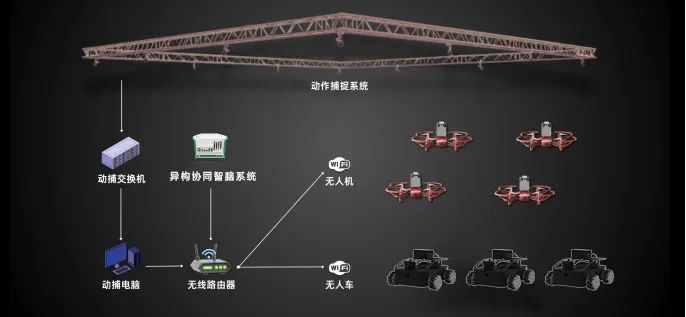
图:开源室内空地协同无人集群实验平台
通过该平台,用户可以在真实或仿真环境中对智能体之间的协作、路径规划与自主决策进行深入探索。为相关领域的教学及科学研究提供良好的实验载体。
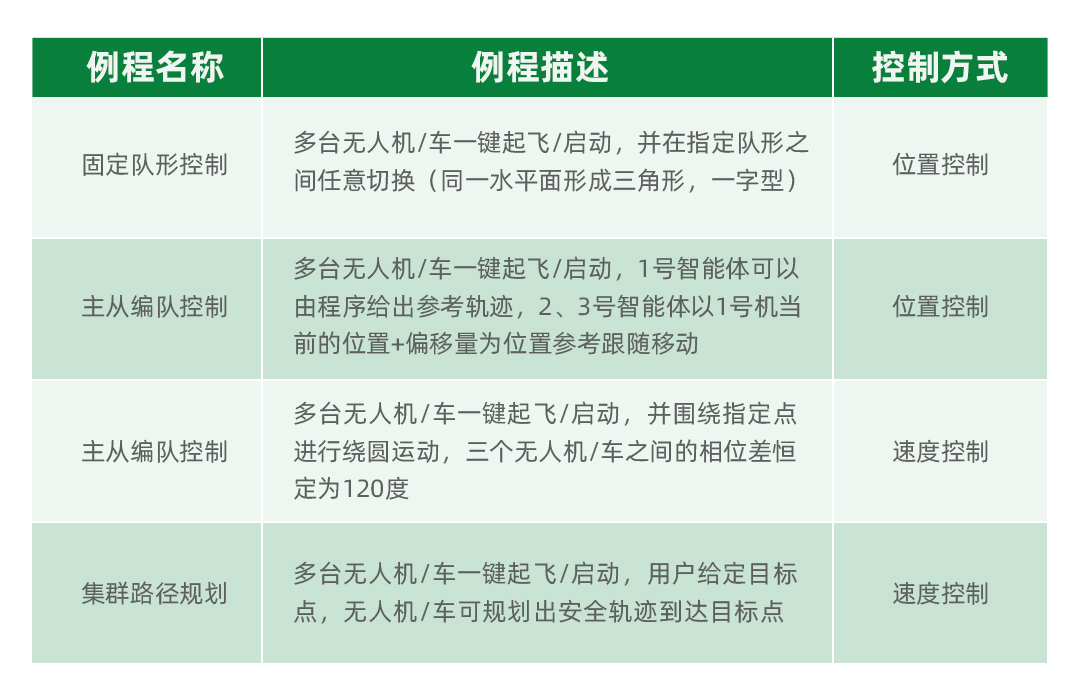
图:单台无人机/车可实现例程
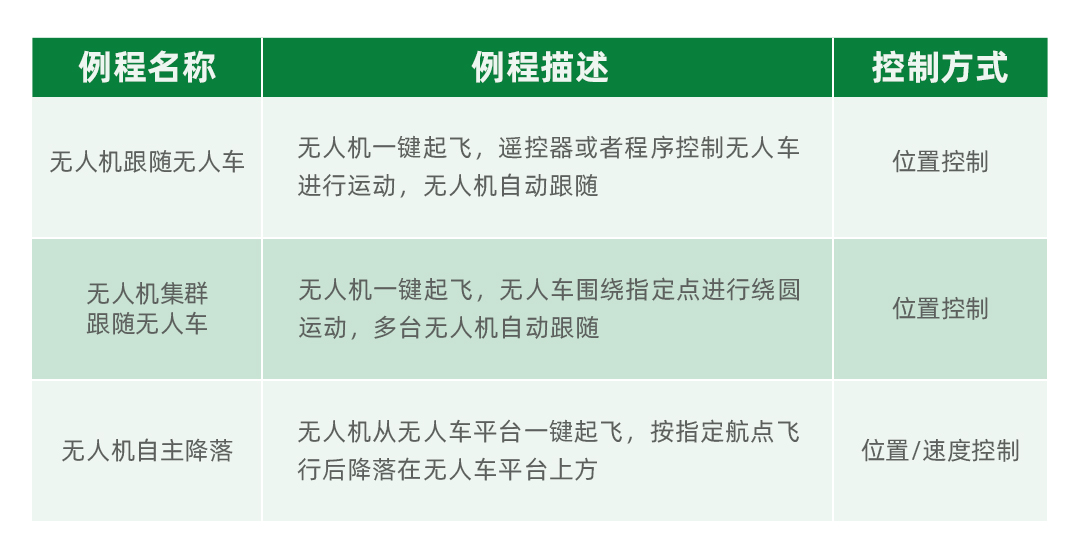
图:车机协同可实现例程
核心优势
亚毫米级室内定位系统:采用室内光学运动捕捉技术,定位范围大,支持亚毫米级定位,能够同时捕捉多台无人机或无人车。
丰富的智能体平台选择:本实验平台支持多种无人机/无人车开发平台(被控对象数目可根据实验室具体情况扩展)。
丰富的控制接口:无人机提供位置、速度和加速度多种控制模式接口,无人车支持地面系位置、地面系速度、车体系速度等多种控制模式接口,并支持无人机/无人车位姿、底层传感器raw数据等反馈,可满足导航、制导规划、控制等多种算法开发验证需求。
多种控制算法的示例程序:包含了单机/单车轨迹控制、集群协同控制、队形变换、自主智能避障防撞等实例程序,并且支持程序的二次开发和功能定制。
基于ROS的配套软件:提供基于ROS的二次开发例程,支持C/C++、python等多种语言编程,代码简单易懂,注释丰富。
完备的安全检测功能:无人机无人车和例程程序具有完整自洽的安全逻辑和安全检测功能,可以应对停电、控制电脑死机、断网、动捕异常、无人机无人车故障等突发情况,保证实验人员和实验设备安全。
系统组成
本实验平台的组成包括以下几个部分:
CSPACE实时仿真控制系统
本实验平台基于中科深谷自主研发的CSPACE实时仿真控制系统进行开发。CSPACE作为无人机、无人车等异构智能体的统一主控制器,为集群协同控制算法提供高确定性、低延迟的运算环境,确保复杂协同任务的实时响应与精确执行;同时基于数字孪生技术提供虚拟仿真控制及虚实联合集群控制,提供丰富的二次开发例程。
硬件
(1)无人机多智能体
本实验平台配置多台微型无人机开发平台,体积小巧,飞行稳定性强,适合大规模集群算法验证。每款无人机均配备多种传感器和控制接口,能够执行位置控制、路径规划、速度控制等任务。

(2)无人车多智能体
本平台配置的无人车平台采用麦克纳姆轮驱动技术,支持复杂环境中的精确运动与灵活操控。该无人车平台配备了ROS主控系统,能够进行精确的路径规划、避障与集群协同任务,适用于多种实验场景。

(3)室内实时定位系统
室内实时定位系统基于光学动作捕捉技术,主要由红外光学动作捕捉镜头、操作及分析处理软件和配件组成,可捕捉实验环境内智能体的三维空间位姿,系统定位精度可达亚毫米级。
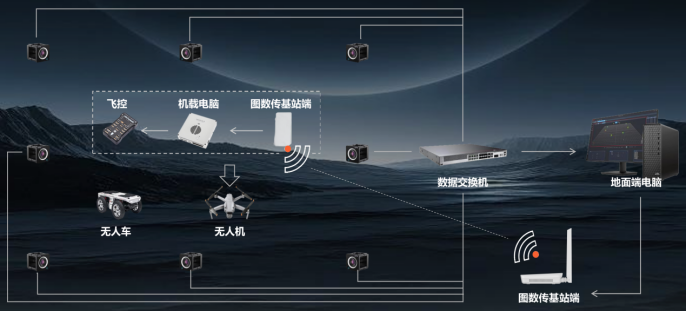
图:动作捕捉系统示意图
软件
(1)室内实时定位系统软件
动作捕捉系统软件与光学动捕相机配套使用。该软件可对捕捉到的数据进行进一步处理和运算,支持实时、后处理两种分析模式,支持一键创建单个或多个刚体,可以获取目标物体的精确位置和姿态等三维数据,能将捕捉的数据以文件形式录制,并以多种方式导出,动作捕捉数据精度达亚毫米级。软件可计算/输出位置、速度、加速度、角度、距离等数据。
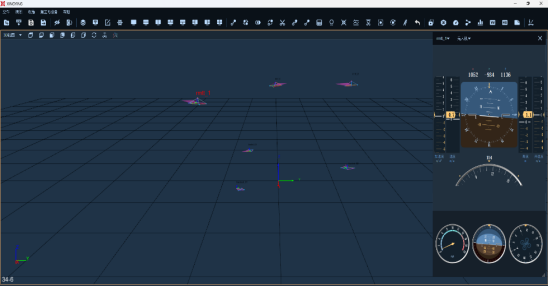
图:动作捕捉系统软件 - FZMotion-Moca
(2)集群系统地面站
开源室内空地协同无人集群系统地面站基于QT for ROS的框架的多智能体交互软件,开发语言为C/C++,运行环境为Linux(Ubuntu 20.04)。软件架构采用多线程架构设计并行处理任务,通信使用ROS话题通信控制多个智能体,融入ROS生态,可扩展性强。
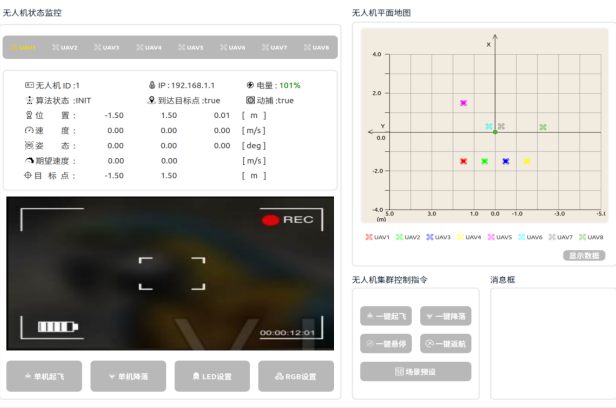
图:开源室内空地协同无人集群系统地面站
(3)集群系统配套软件
集群系统配套软件采用基于 ROS 的模块化架构,各功能节点独立运行并通过 ROS 通信。其优势在于通过共用 VRPN 节点统一提供无人机和无人车的位姿数据,支持异构平台协同;同时为无人机和无人车分别设计了专用的集群避障算法节点和分层控制节点,并配备适配各自硬件的底层驱动,实现了系统的高效集成、灵活扩展与稳定控制。
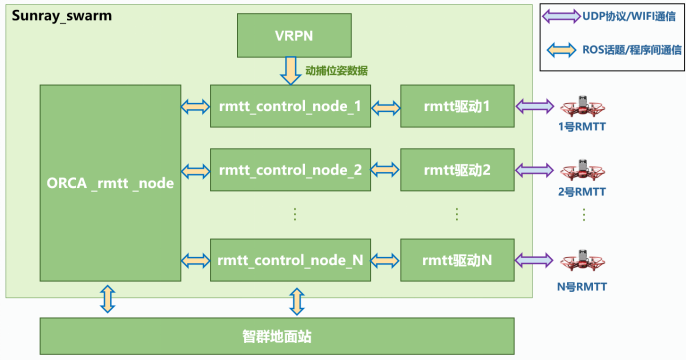
图:集群无人机软件框架
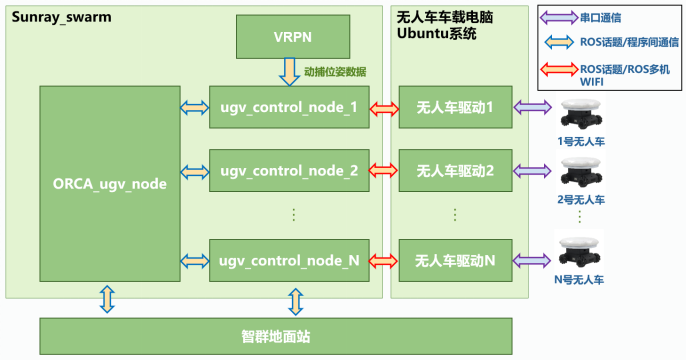
图:集群无人车软件框架
(3)二次开发接口
本系统功能包中提供了人机控制二次开发接口、无人车控制二次开发接口和集群避障二次开发接口,用户通过这些二次开发接口能够快速进行算法验证。
深度赋能教学与科研
开源室内空地协同无人集群系统通过集成无人机、无人车集群及高精度定位模块,构建了安全可控的跨域协同实验环境,可广泛应用于自动化、人工智能、机器人工程等专业的教学实训与科研探索。其开放架构支持从基础控制算法验证到复杂集群智能研究的全链路需求,助力院校提升学生实践能力,促进多学科交叉融合,为前沿领域人才培养提供坚实支撑。
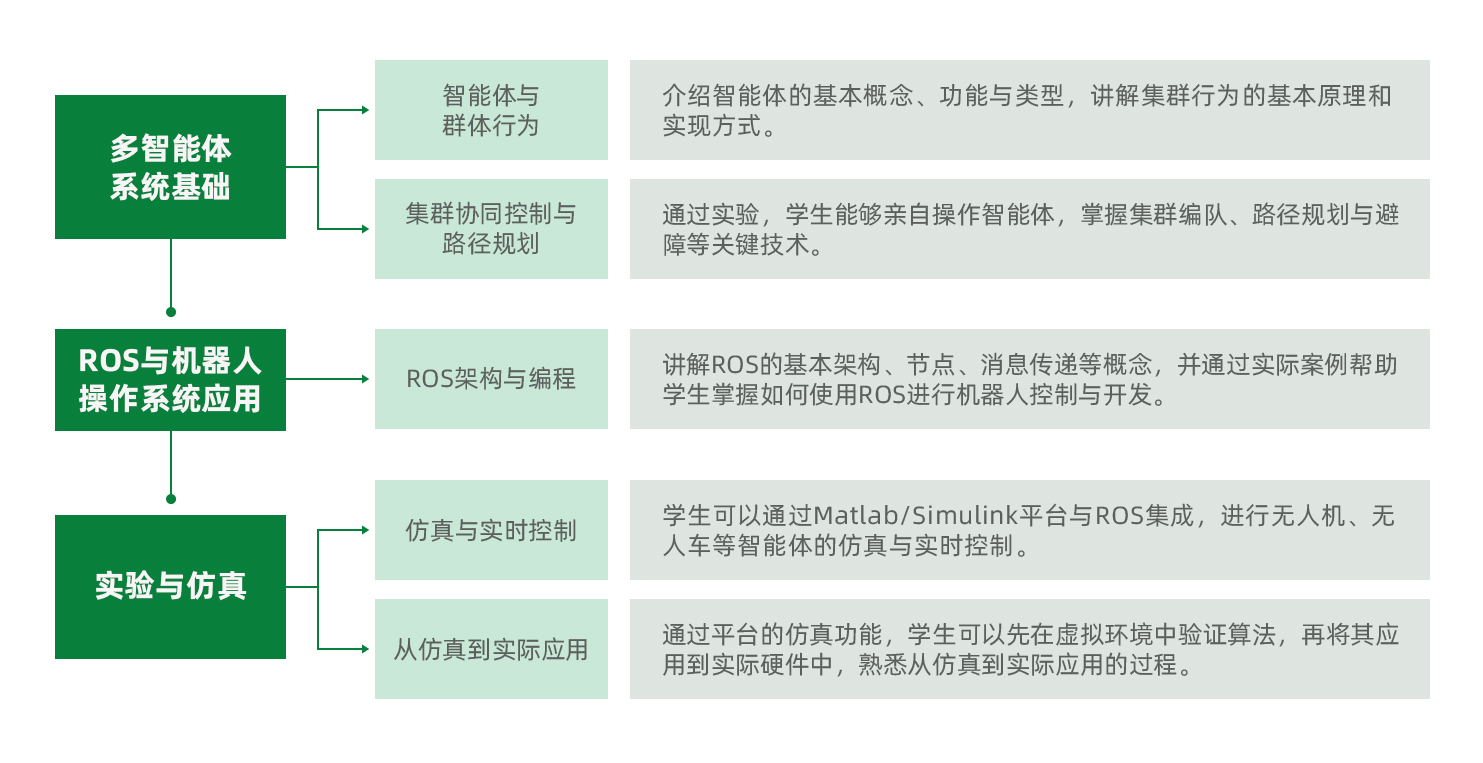
支持教学方向
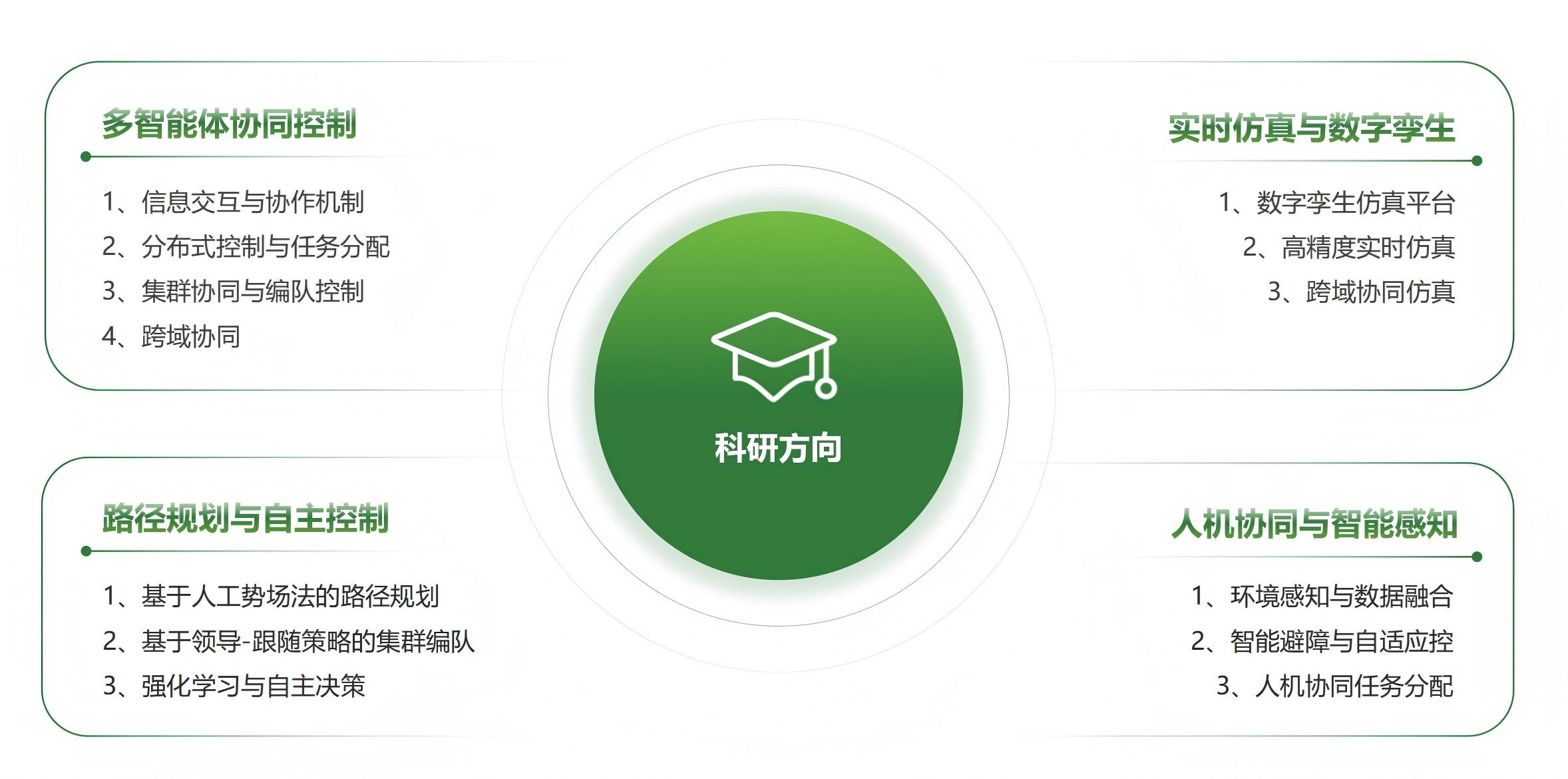
支持科研方向

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)