

开源智能移动操作机器人
发布日期:2021-07-16 浏览次数:3298
开源智能移动操作机器人是中科深谷基于传统工业移动机器人,应用视觉传感器与人工智能技术,引入智能算法,满足各类应用场景需求打造,是未来自动化产业升级的发展方向。该平台在缩短产品生产周期,降低企业运营成本,满足制造业柔性需求以及保障人身安全等方面发挥重要作用。与传统移动操作机器人相比,本产品解决了机器人在工作运行时需要按照预设轨道、预设指令执行任务,导引线障碍物停留,多机作业导引线阻塞,柔性化搬运障碍等问题,是在传统移动操作机器人之后发展起来的新一代具有智能识别、自主移动的机器人技术。
该平台包括两种不同类型的移动机器人,分别是四轮差速作业机器人和履带式作业机器人。

移动视觉抓取机器人
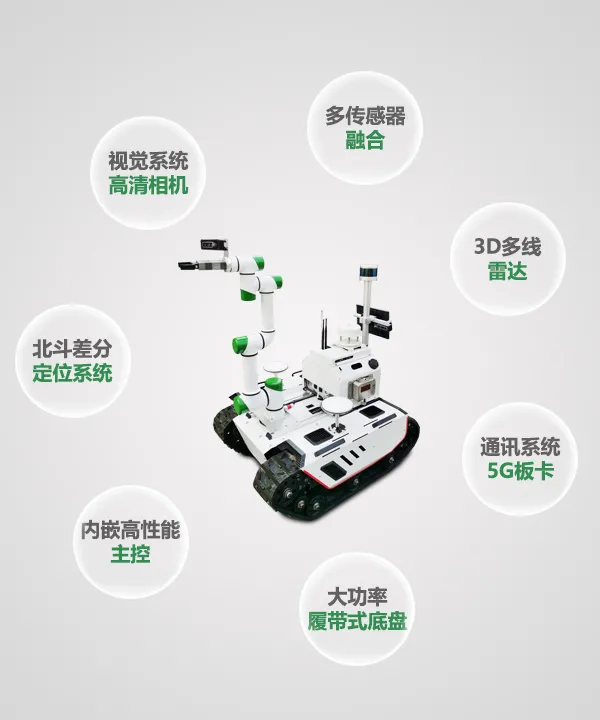
履带式作业复合机器人
两种机器人都是通过搭载机械臂控制、视觉伺服、传感器等系统控制,完成对物品的种类识别、对标位置、自主移动和自动抓放等。拥有多环境工业场景应用、自主开源化设计、支撑MATLAB和ROS联合进行算法开发研究等特点,共计8项。

四轮差速作业机器人与履带式作业机器人
产品特点:
1. 工业结构设计。关键性组件符合工业标准,支持多种环境下的工业场景。
2. 模块化设计。拆装便捷、结构紧凑、功能丰富。
3. 自主开源化设计。六轴机械臂、底盘、视觉、导航系统可自由进行单独或融合算法研究。
4. 适用范围广。支撑MATLAB和ROS联合进行算法开发研究。
5. 提供应用案例。供用户在更深层次上的学习、研究与部署应用。
6. 完全开源的平台模式。预留开发接口,可进行应用的集成,提供全方位的技术支持,能很好支撑工业应用。
7. 高性能计算机作为主控系统。可实现机械臂、底盘、视觉、导航系统、夹爪的控制,满足大量数据的处理运算需。
8. 多场景应用。可用于工业生产、特种地形作业、安防巡检等研究及应用。
在核心技术方面,移动操作平台采用可视化的虚拟仿真系统与GPU的运动控制系统,以此验证应用的可靠性和提高人工智能的算法速度。使用5G通信网络远程控制,结合RTK+INS数据融合技术,打造厘米级高精度重复移动定位。通过深度学习和机器学习,实现工业应用分类、农业应用识别与自动驾驶应用的数据分割。其中,系统核心零部件已通过认证,并达到工业应用标准。

核心技术
当前,该平台已有4项应用案例,它们分别是:
(一)移动操作机器人的电力设备巡检(已应用于安徽省)
传统变电站监控和巡检主要是通过人工巡检的方式进行设备检查,存在监测质量分散、巡检工作强度大、数据传输慢等问题。使用平台中的四轮差速作业机器人,以自主遥控的方式完成GPS定位导航,通过机械臂末端安装的特制传感器,对电力设备进行无人化自动检测。可在无人值守的变电站及时发现电力设备缺陷、异常挂起等现象,能自动报警或进行故障处理预备方案,切实有效的解决人工巡检问题。


移动操作机器人的电力设备巡检
(二)移动操作机器人的警用巡逻(已应用于浙江省)
警用巡逻、安保机器人是运用物联网、人工智能、云计算、大数据等技术,集环境感知、路线规划、动态决策、行为控制以及报警装置于一体的多功能综合系统,具有自主感知、自主行走、自主保护、互动交流等能力,可帮助警察完成基础型、重复性、危险性的巡逻工作。随着社会发展,警用巡逻、安保机器人在公共安全领域的应用需求逐渐增多,应用场景不断扩大,所以基于典型应用场景的功能需求和应用模式下的警用机器人发展趋势是具有一定的参考意义。移动操作机器人的警用巡逻

移动操作机器人的警用巡逻
(三)基于深度学习的车道线检测(已应用于江苏省)
车道线检测属于自动驾驶中的一个基础模块,而现实生活中车道线的存在位置监测是模糊的、可被光照影响且遮挡的。但基于一种最直接的深度学习方案,把车道线检测视为分割任务方式,可利用视觉传感器获取图像数据,经过卷积神经网络得到车道线的处理结果。

基于深度学习的车道线检测
(四)基于深度学习的水果采摘(已应用于安徽省)
基于深度学习的水果采摘利用2D图像进行定位,结合深度图像来得到物体的三维信息,帮助移动机器人感知三维图形中分物体的位置和姿态。此项应用在水果采摘以及实现农业自动化方面有着重要意义,能够实现基本场景的水果抓取,其水果识别率高达到99%。

基于深度学习的水果采摘
未来,随着深度学习算法的成熟商业化,移动作业机器人在未来还有进一步的增长空间。综合多因素预测,移动作业机器人市场近五年将保持两位数增长,并且预计到2022年,全球移动机器人中对移动作业机器人的需求、收入和销量预计将超过传统AGV。


