

开源模块化协作机器人综合平台
发布日期:2021-07-16 浏览次数:2981
一、产品概述
开源模块化协作机器人综合平台是为更好地赋能机械臂的教学、科研和产业化而设计的。平台涉及到机器人操作系统、机器人建模与仿真、机器人运动控制、传感器及检测技术、机器视觉、深度学习等技术领域,该系统既可以作为自动化、机器人、机械电子、智能制造、机械工程等专业中的《机器人学导论》、《机器人控制技术》、《计算机控制技术》、《电机与伺服控制》、《机器人学》、《机电一体化技术》、《机器人操作系统》 等课程的配套实验实践平台,也同时支撑机器人相关专业和课程的运动学、动力学、伺服驱动、运动控制、智能控制等算法的研究。
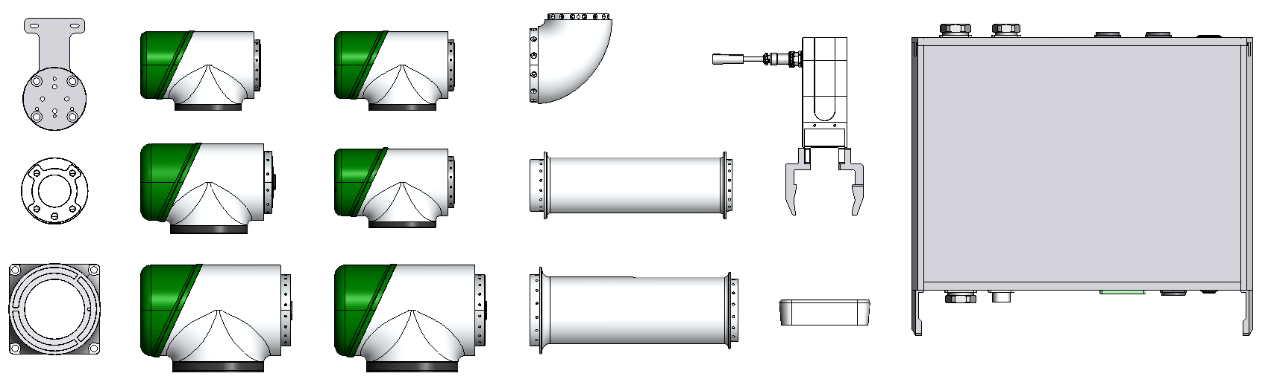
该平台提供一套机器人模块,涵盖4种驱动模块(基于机电一体化关节扩展,包含转动模块、直线运动模块、夹持器模块),6种构件模块,3种智能感知模块供选配(深度相机、关节力传感器、六维力传感器等)。
通过这些模块组合,可完成三自由度关节串联机械臂,四自由度关节串联机械臂,六自由度关节串联机械臂,二自由度云台等机器人的研究。


三轴、六轴协作机械臂


传送带动态抓取 基于视觉的水果采摘
二、方案特点
1、MBD工程开发方法基于模型的设计(MBD)是主要针对汽车、飞机、机器人等电控系统、雷达导航等信号处理系统、电力系统、通信系统等较复杂的需要单片机或计算机作为主处理器的控制系统设计,通过MATLAB软件并综合采用物理建模、计算机仿真、自动代码生成和实时控制、软件模型与控制器交互测试验证的一种先进的开发方法。
MBD工程开发优势有:
①充分利用MATLAB国际先进的工程软件,丰富的算法等资源
②建模、仿真、实时控制一体
③自动代码生成,快速验证(RCP快速控制原型开发)
④HIL硬件在环仿真测试(控制器控制软件模型)
⑤模块化设计、易于整合和集成、易于承接工作、易于团队协作
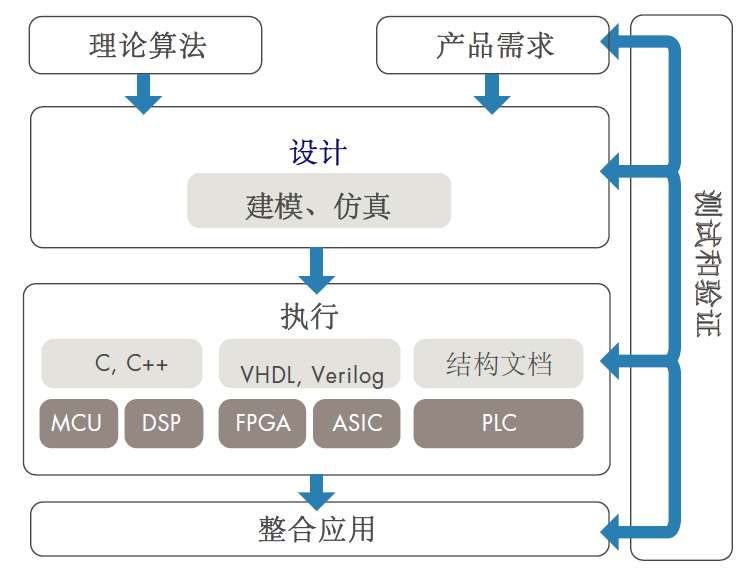
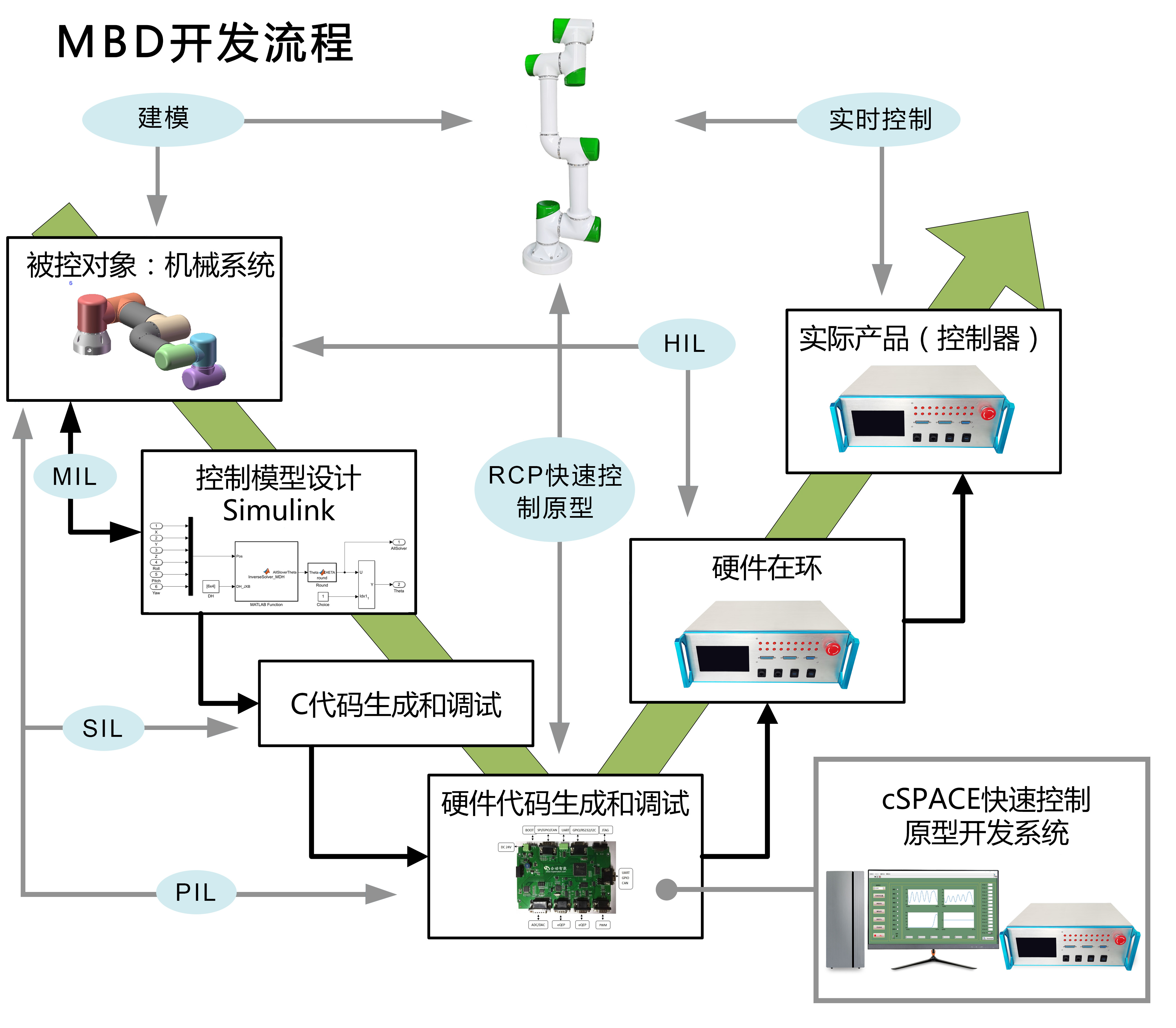
图1 基于MBD的V型开发流程
2、成熟工业机械臂产品为实验载体
开源成熟工业机械臂产品为实验载体,立足教育,面向工业,支撑机器人建模仿真、机器人运动学及控制、机器人动力学及控制等教学实验,以及科研领域的算法验证实验和打磨等高级工业级应用的控制实验等。
3、模块化设计
利用标准统一的机械、硬件接口,模块化搭建构成多类机械臂产品,不仅可以实现硬件系统“积木式”搭建,还可以基于核心模块进行自由拓展设计不同产品模块。
4、全开源
提供机器人应用、算法、控制与驱动、仿真等实例和源码,满足机器人全栈工程师培养、机器人高级运动控制科研和工业级项目应用需求。
5、提供丰富的案例
提供丰富的机械臂运动学、动力学控制案例,方便地掌握机械臂控制系统的技术,进行更深入的研究;可进行参数辨识、柔顺控制、拖动示教、碰撞保护等高级动力学算法和机器人关键技术的开发。
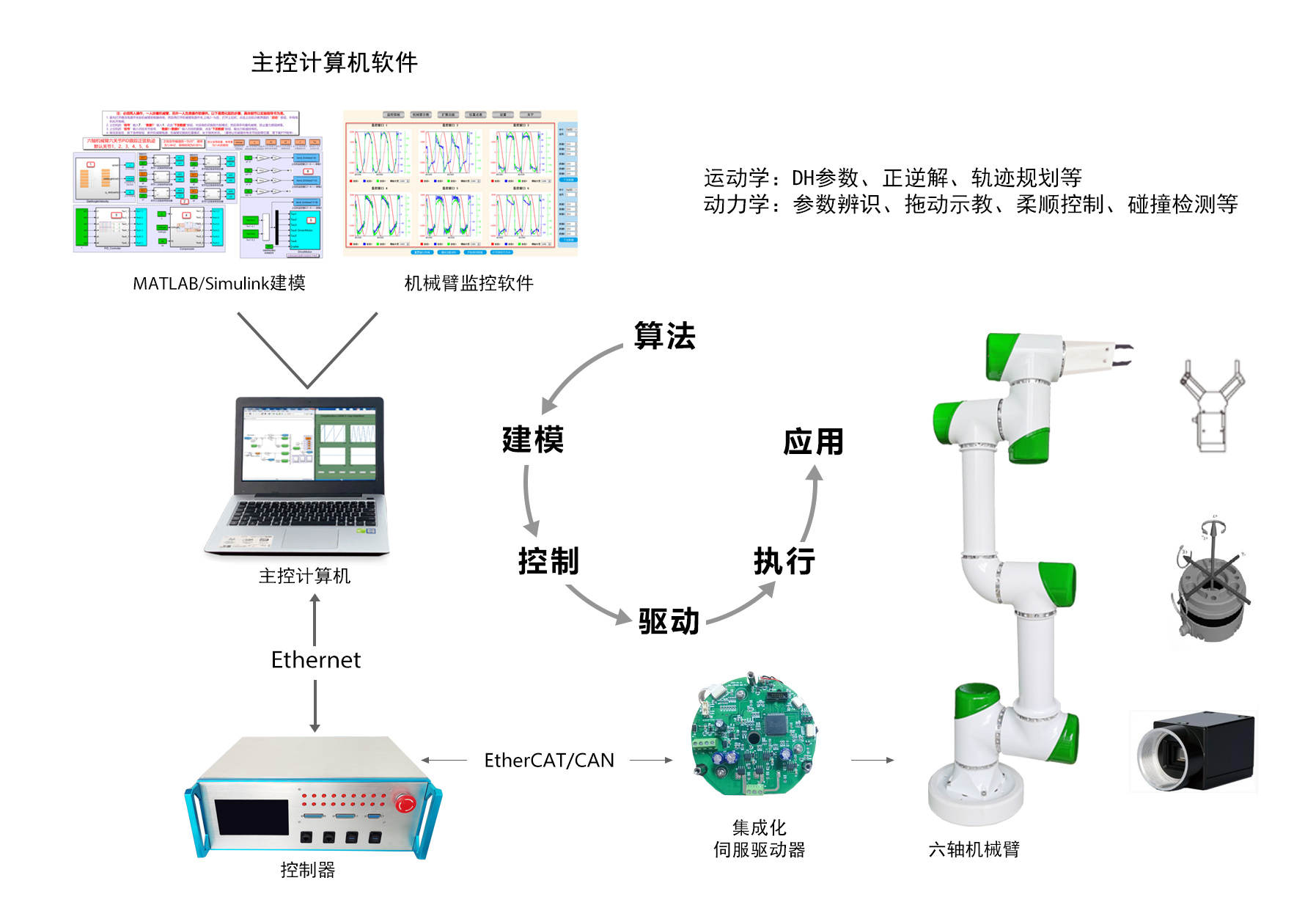
图2 六轴协作机械臂典型案例
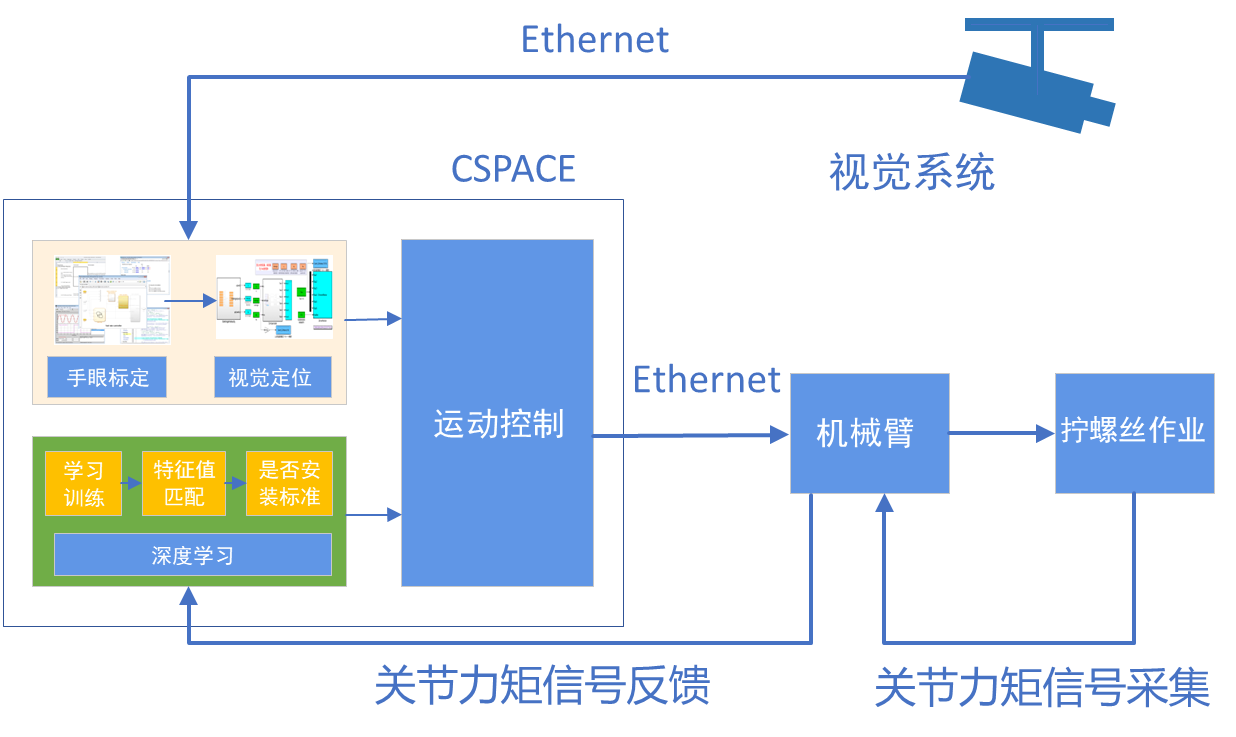
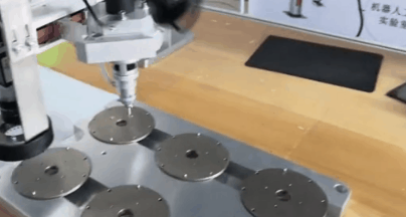
图3 机械臂视觉螺丝锁付案例
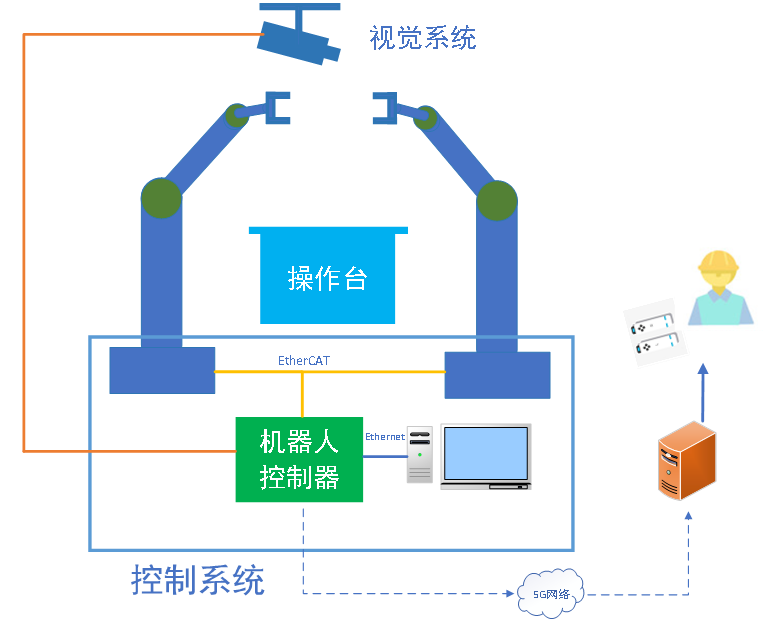

图4 开源智能双臂协作机器人案例
三、课程项目
可根据课程方向选择,含机构设计、运动学控制、系统与仿真、智能控制四部分。
第一部分:
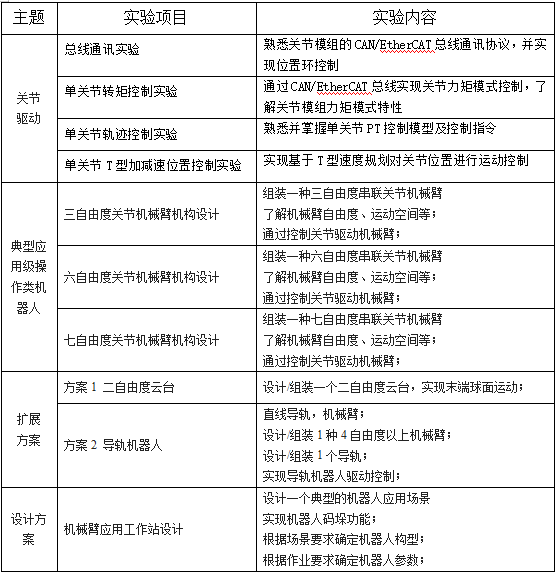
第二部分:运动学控制(根据课程目标可选)
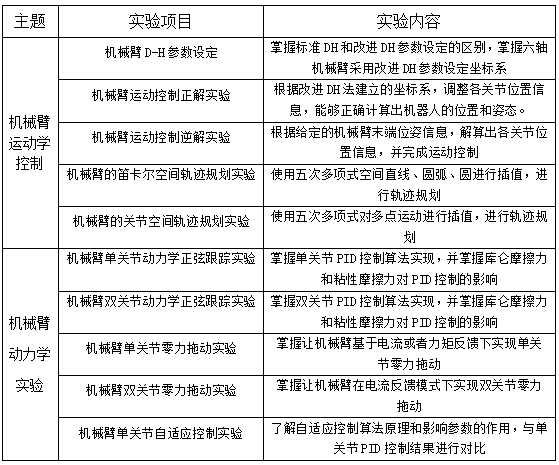
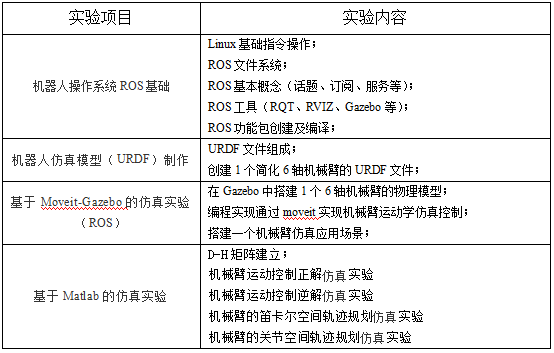
第三部分:系统与仿真
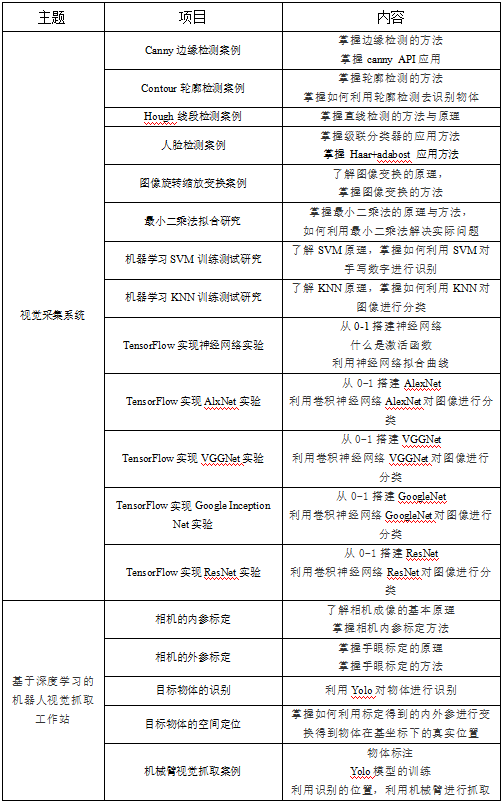
第四部分:智能控制
四、核心模块
1、CSPACE控制与半实物仿真系统
CSPACE控制与半实物仿真系统是基于DSP、ARM或者x86硬件架构和MATLAB/Simulink开发。拥有AD、DA、IO、Encoder、PWM、CAN、SPI、EtherCAT等丰富的硬件外设接口,以及一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是用于进行基于模型设计(MBD:Model-Based Design)控制系统开发的教学和科研产品。CSPACE控制器如下图所示,是可对标国际先进的控制与半实物仿真领域的产品。
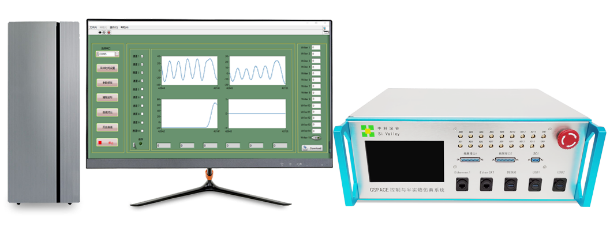
图5 CSPACE控制与半实物仿真系统操作系统版和单机版
2、高精度机电一体化关节模组
机械臂关节模组是由伺服驱动器、无框力矩电机、谐波减速机、光电编码器(减速机前)、绝对值编码器(减速机后,测量机械臂的输出轴的绝对角度)和继电器抱闸等部件组成,并集成在一个关节中,很适合组装成多轴机械臂,也可以作为其它自动化设备使用。其具有传动效率更高,结构紧凑,能实现更大的连续转矩和瞬间扭矩输出,具有“小身材,大力气”、高精度的特点。关节模组伺服驱动器自主开发,性能优异,开放电流、速度、位置三环控制,支撑高级动力学算法研究。
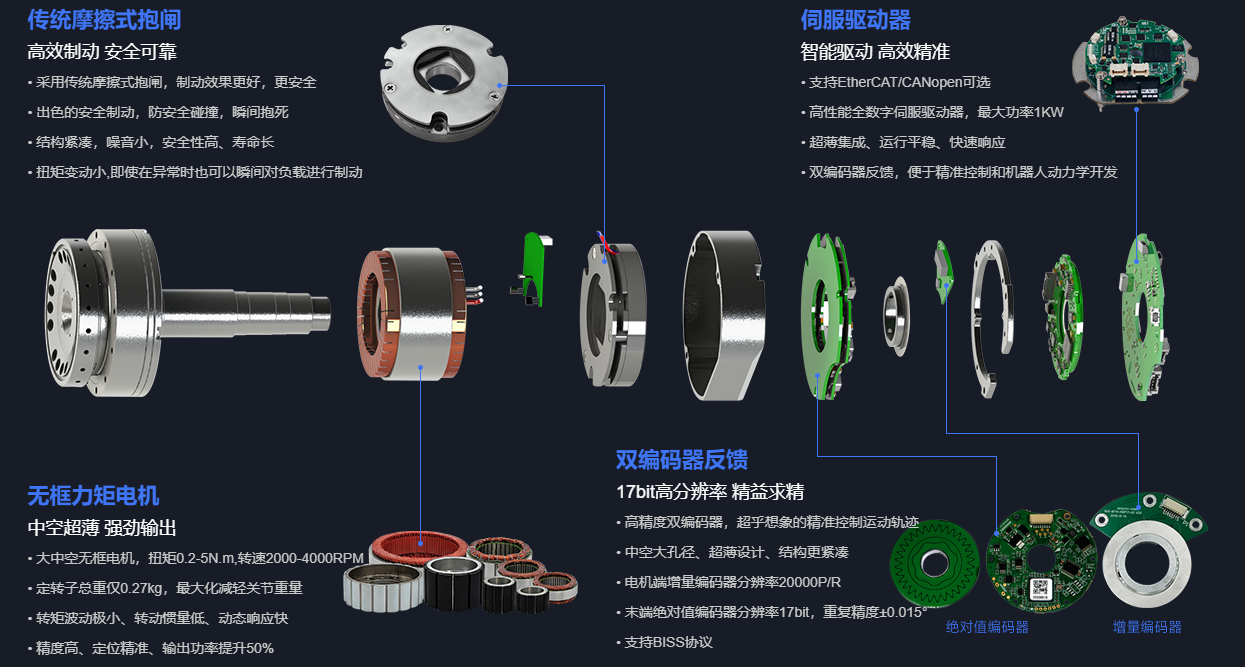
图6 关节模组构成
五、配套系统及软件支持
1、MATLAB/Simulink
MATLAB/Simulink 2020b,搭载机器人工具箱Robotic Toolbook for Matlab
2、开源机器人操作系统(ROS)
操作系统:Ubuntu18.04系统,配套开源机器人操作系统ROS melodic
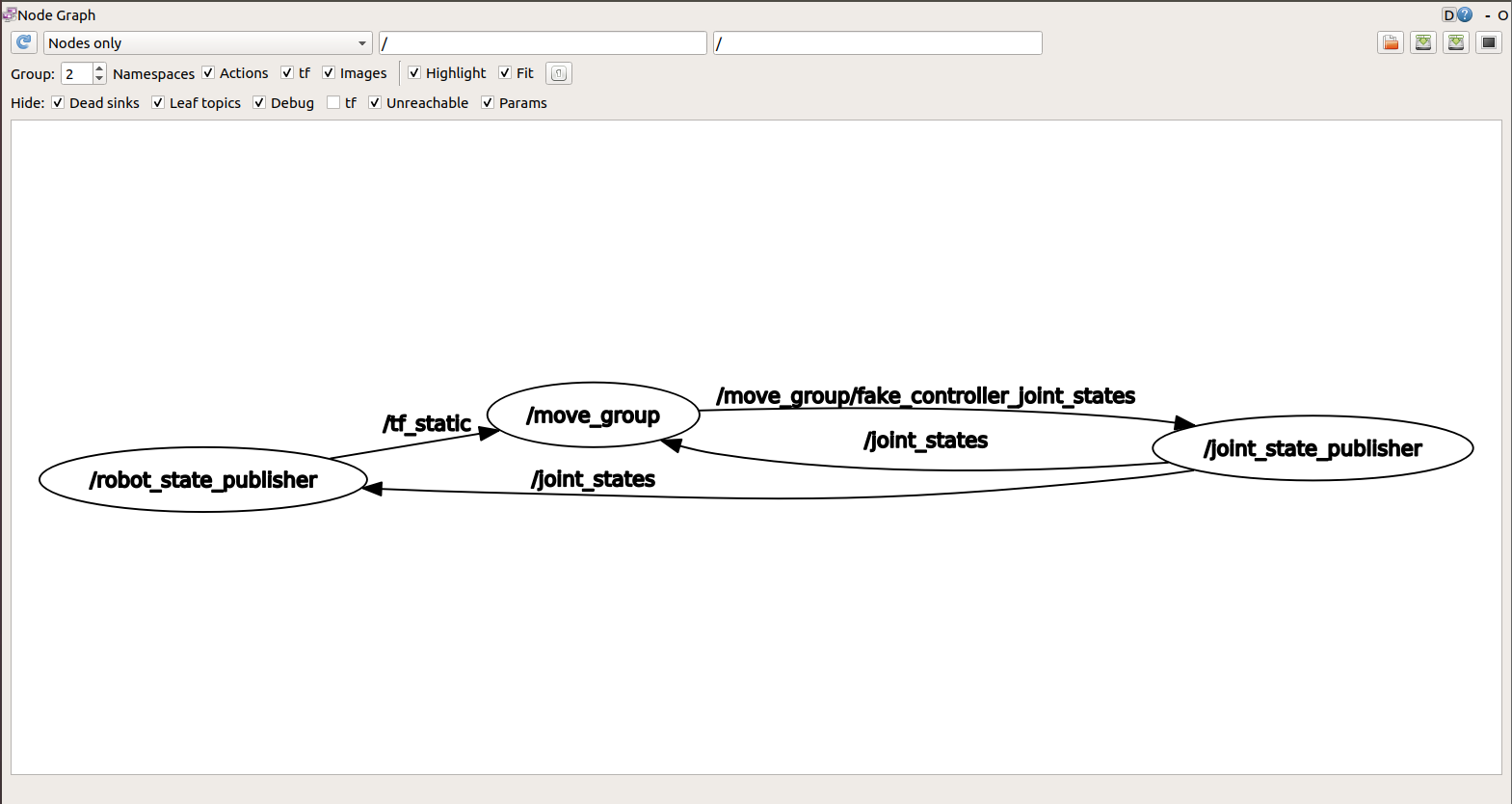
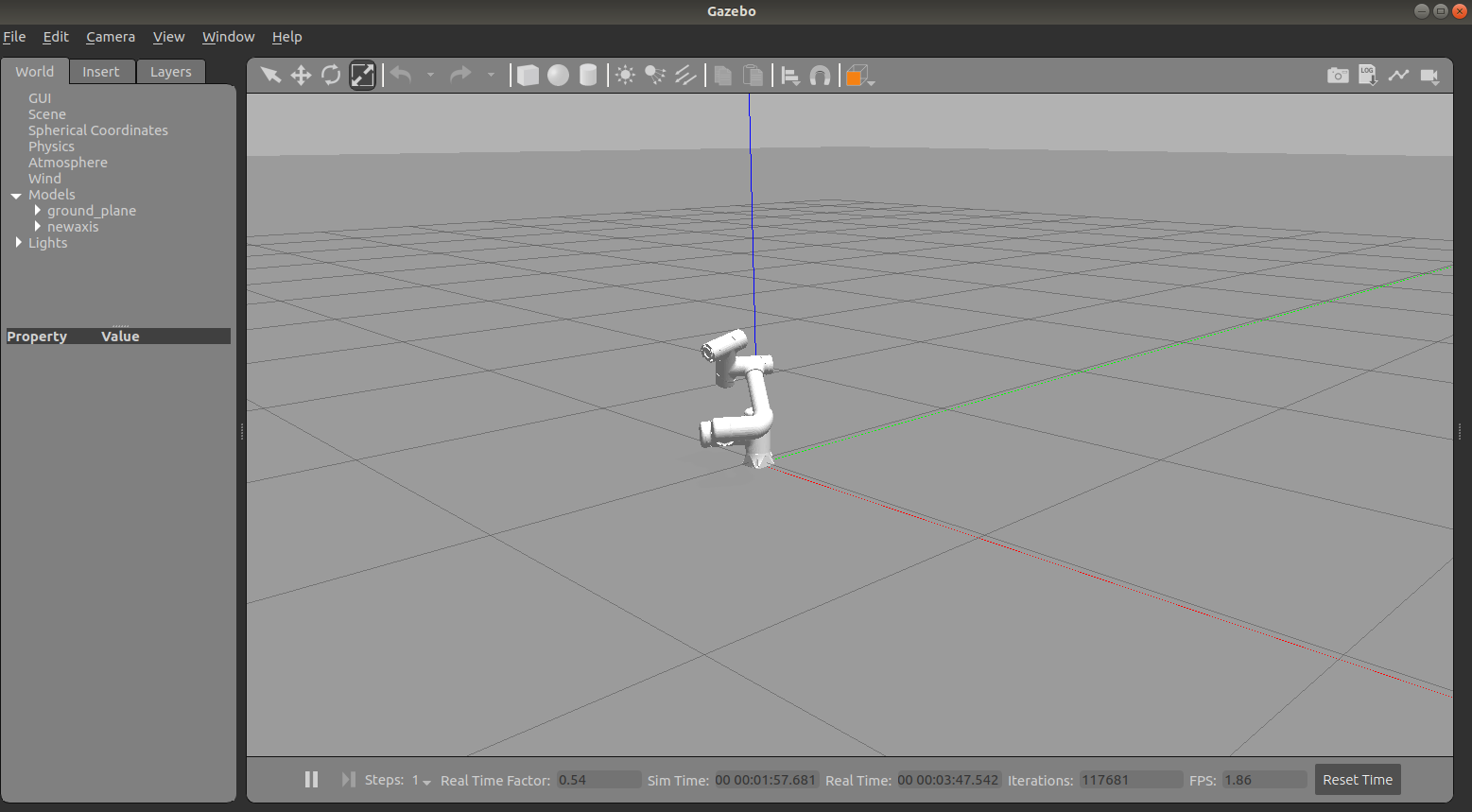
3、Moveit-Gazebo

- 上一篇:开源智能双臂协作机器人
- 下一篇:开源智能移动操作机器人


