

实验平台监视系统
发布日期:2021-12-31 浏览次数:3232
平台提供了 MelfaRXM.ocx 软件接口配合机器人自带的通信服务器实现的监控接口。MelfaRXM.ocx 控件是一个 ActiveX 通信控件,它支持连接多个机器人下位机控制器,也就是说,通过 MelfaRXM.ocx 可以通过机器人编号实现同时对多个机器人进行监控。对于单个执行监控程序的 PC 所能连接机器人数最大为 32,即机器人编号范围为 1-32。在使用 MelfaRXM.ocx 通信控件之前需要在程序加入通信控件,并在 Windows 注册表注册,经过正确的配置后,便可以在程序中使用 MelfaRXM.ocx 通信控件。
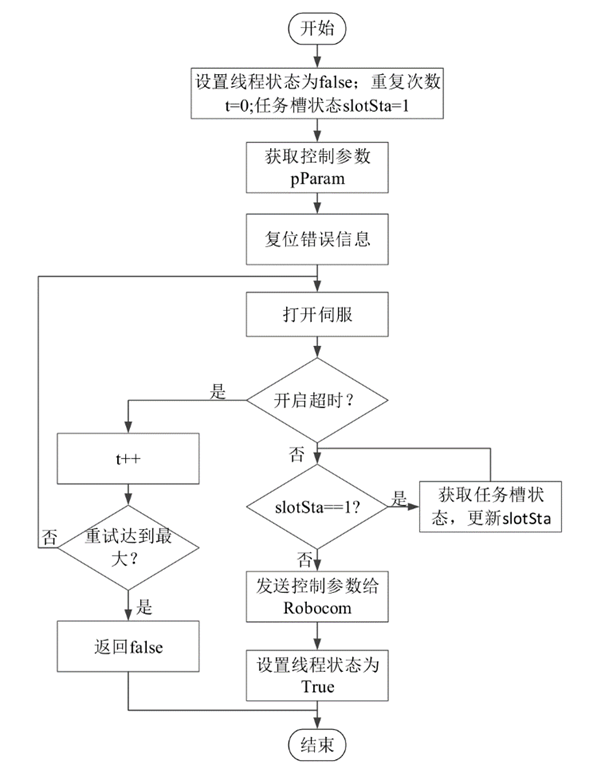
监控接口设计的主要原理基于请求响应机制,即通过发送特定请求给 RobCom服务器,等待服务器响应事件,捕获到响应事件后通过解码响应数据包获得相应监控数据。对于监视类请求,获得的响应为请求的响应数据;对于控制类请求,获得的响应为控制的结果即是否成功。
- 上一篇:最优化算法系统
- 下一篇:人机交互集中控制系统


