

工业机器人拆装调试系统(实物平台+虚拟仿真)
发布日期:2021-04-08 浏览次数:3459
系统概述
工业机器人拆装调试系统涵盖实物平台和虚拟仿真系统两套,实物+虚拟仿真相互对应,方便教学和实验实训。
实物平台由机械拆装实训系统、电气拆装实训系统、机器人拆装变位台、工业机器人功能验证系统、拆装工具车等设备组成。


实物图 控制逻辑图
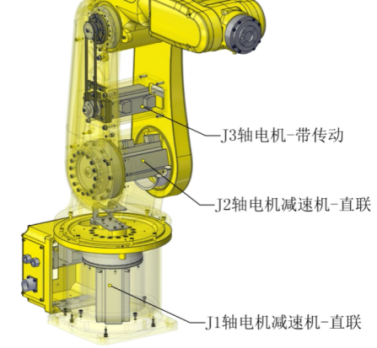
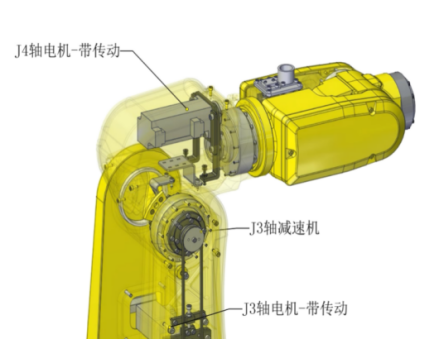
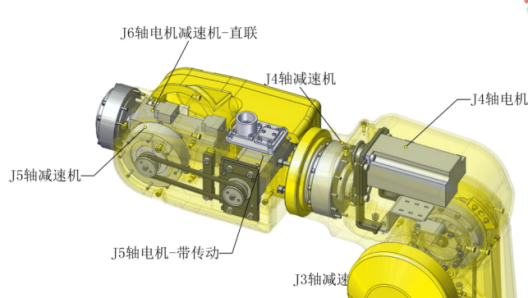
实物平台设置了机械装置装配、电气装置装配、整机装配、整机调试、校准、标定、维护与保养、维修、培训与管理等功能,可完成工业机器人装调与维修实训任务,能够满足工业机器人装调维修的理论考核和实训考核任务,符合技能鉴定考核标准;该平台采用模块式结构,按工业标准要求设计,结构简单、紧凑,适用于机器人装调与维修实训,可锻炼学生动手能力和精密装配能力,并且各单元模块可以拆装到螺钉级。使学生更深入了解工业现场常用的机器人本体内部机械结构、机械连接、电机安装、减速器装配、同步带传动等。
机器人机械系统简图:
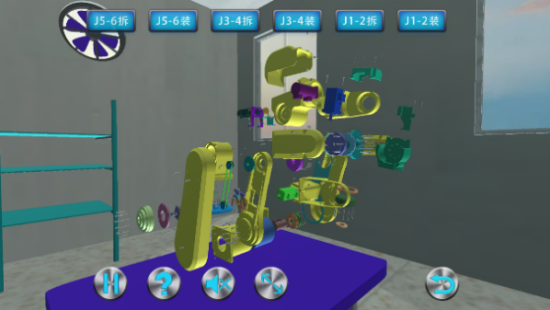
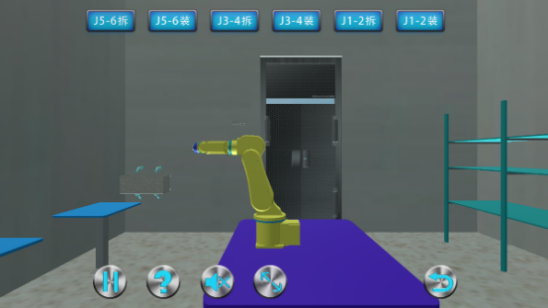
虚拟仿真系统:
技术参数
1.输入电源:单相三线 AC220V±10% 50HZ;
2.工作环境:温度-10℃-+40℃,相对湿度<85%(25℃),无水珠凝结海拔<4000m。输出电源:直流稳压电源:24V/5A。
3.设备尺寸:1360*940*1600 (L*W*H,包括机器人本体的高度)。
基本功能
1.系统中,工业六自由度串联机器人采用关节式结构,按工业标准要求设计,速度快、柔性好;模块化结构,简单、紧凑;提供通用机器人语言编程系统;
2.本机器人本体采用铸铝与硬铝合金材料,在工作过程中,运动平稳可靠,无燥声,定位准确,运行精度高。
3.工业机器人功能验证本机器人末端执行机构采用气动吸盘工具。
4.工业机器人模块:由工业机器人、底座、末端快换工具、机器人控制系统和示教盒组成。
搬运码垛模块:搬运码垛模块由物料、料板、垛板组成,该模块还原工业机器人定点搬运码垛应用。同时加入了丰富的垛形,提高码垛搬运的趣味性和实用性,符合教学培训要求。
实训项目
|
机器人系统认知以及应用 |
机器人电气系统认知 |
|
工业机器人运动学分析及控制 |
机器人示教盒认知与编程操作 |
|
机器人传动系统认知以及应用 |
工业机器人轨迹、码垛实训作业 |
|
工业机器人安装与维护 |
PLC系统编程与调试 |
|
液压与气压系统认知以及应用 |
HMI人机界面的编程与调试 |
|
自动控制系统的安装与调试能力 |
机器人系统故障检测与排查 |
- 上一篇:多场景全模块工业机器人应用工作站系统
- 下一篇:CSPACE-V3嵌入式系统版


