精品课推荐 | 经典机电控制系统开发(以倒立摆为例)
发布日期:2022-10-21 浏览次数:2420
随着科学技术的发展,控制理论及相关问题在工程领域中的应用更加广泛。控制理论的发展需要一个典型的对象来验证某一种理论的正确性以及实际效果。倒立摆系统的稳定控制是非线性动态控制系统中的经典问题,控制理论中的许多经典问题都可以在倒立摆系统的研究中反映出来,如非线性、不稳定、欠驱动、强耦合性等。倒立摆是一个典型的非线性、多变量、强耦合、高阶次的不稳定系统,被众多高校及实验室用于控制理论的研究与控制算法的验证。倒立摆系统可以很好地检验各种控制算法的稳定性和能控性,具有深远的研究意义。
倒立摆的起摆稳摆控制算法,也被广泛应用于各种庞大复杂的控制工程的设计开发中。一方面,与控制理论相关的专业问题,如系统鲁棒性、能控性、稳定性等特性都可以通过倒立摆平台直观展示,对于实验教学有着重大意义。另一方面,经倒立摆验证的各种控制理论同样适用于平衡车、无人机等的平衡控制。倒立摆系统的研究包揽着多个学科共同探究的问题,并且在航空航天、军事、工业工程领域具有重大的实践意义。
由于被控对象的结构越来越复杂,从而衍生出多种类型的倒立摆,如直线倒立摆、旋转倒立摆、球形倒立摆等。为了便于控制理论和技术的应用研究,本课程将直线电机倒立摆作为实验平台,来验证倒立摆系统的性能指标。
课程及平台介绍
相比于其他复杂或者危险性更高的平台,倒立摆实验平台搭建起来更加简单,安全性更高,各种复杂的控制理论基本都可以在倒立摆平台中得以验证,作为验证算法的平台具有很大优势。
课程内容
直线电机倒立摆系统介绍
直线电机倒立摆的建模
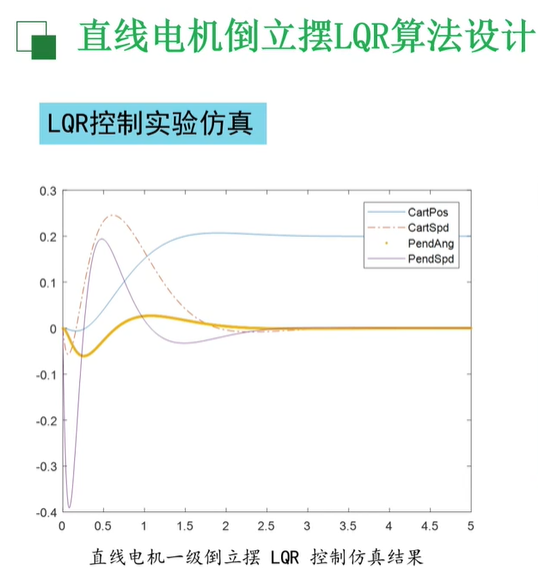
直线电机倒立摆LQR算法设计
直线电机倒立摆Animation仿真控制
直线电机倒立摆HIL仿真控制
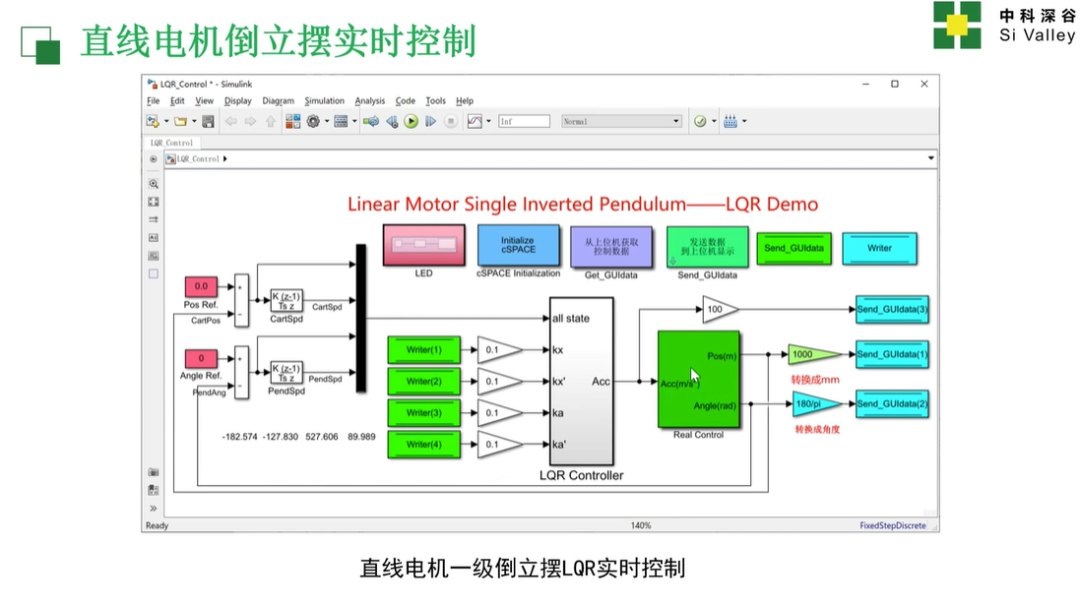
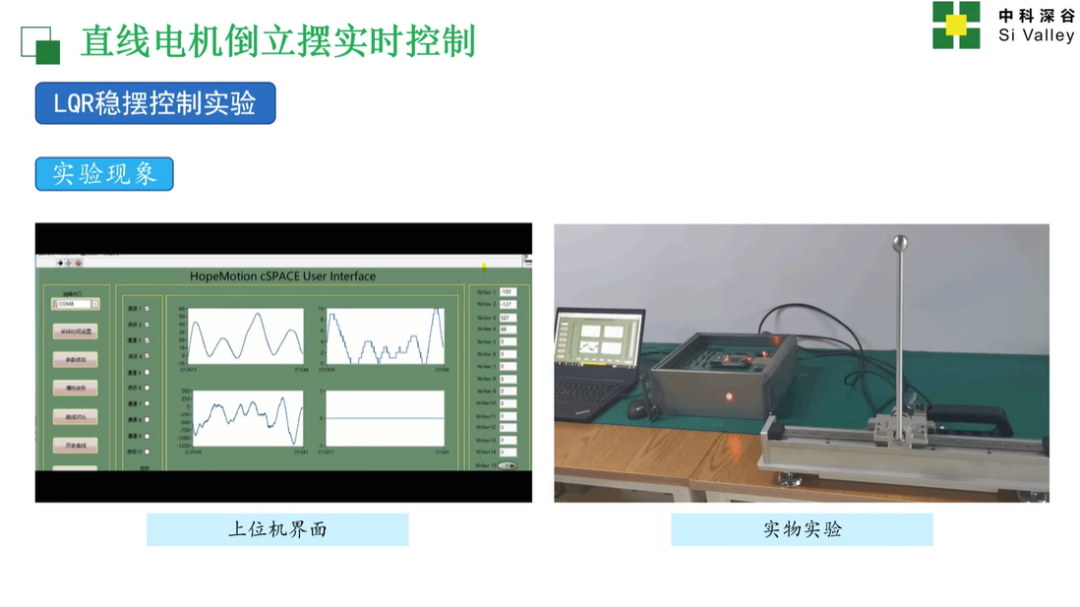
直线电机倒立摆的实时控制
· 人工智能、机器人、自动化、控制工程、机械电子、智能制造等专业的全国高校教师、研究生
· 帮助控制领域相关企业技术负责人/工程师,掌握先进开发方法,提升项目开发效率
· 帮助科研院所的科研人员、教师拓宽科研领域,提高科研成果转化率
· 帮助学生积累项目实战经验
课程特点
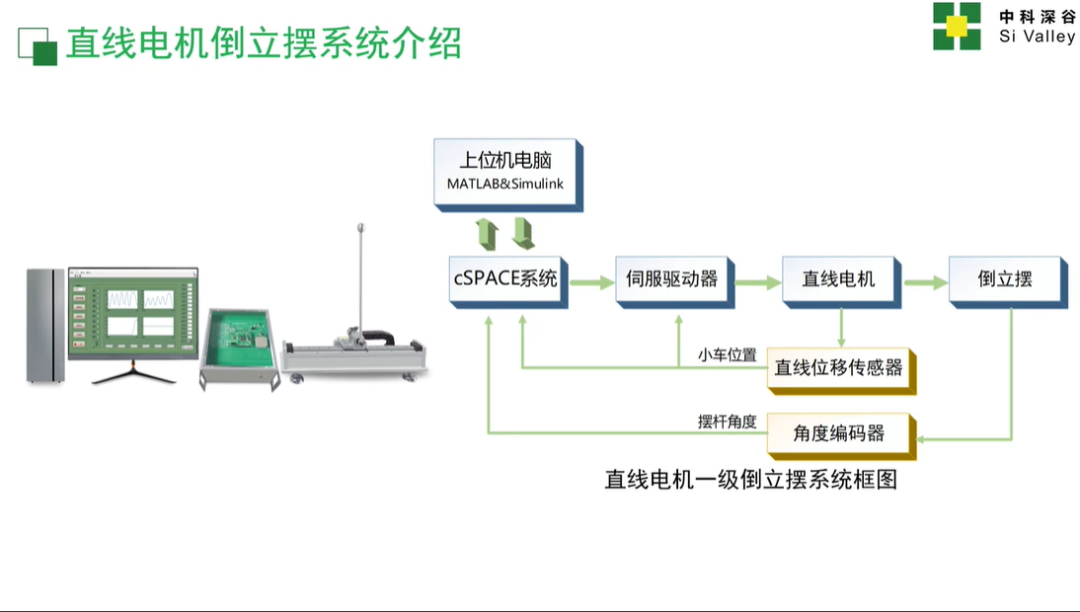
本课程主要基于MATLAB、CSPACE控制系统、介绍一级倒立摆的建模、仿真与实时控制。直线电机一级倒立摆平台主要由直线电机,角度编码器,位移编码器,摆杆机构,cSPACE控制系统和上位机组成。平台融合了多种传感器数据采集、数据分析以及智能控制于一体。
· 对于直线电机一级倒立摆,首先简化物理模型,然后详细介绍数学建模,近似线性处理,最后通过MATLAB直接得到一级倒立摆系统的状态空间方程。
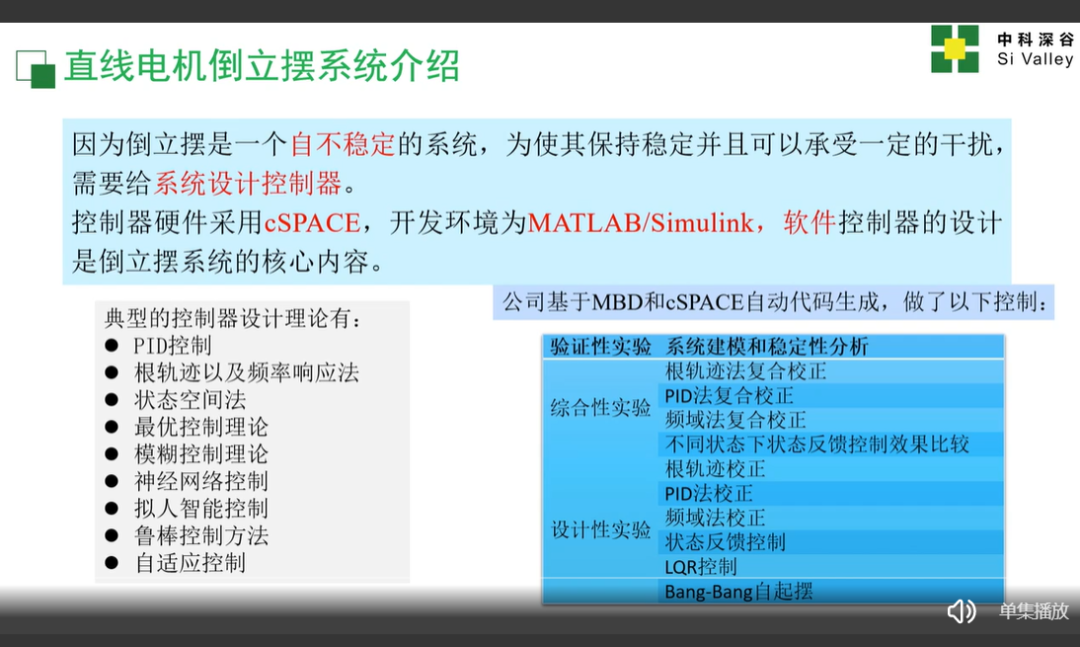
· 对倒立摆系统进行稳定性分析,验证了一级倒立摆系统的能控性和能观性。
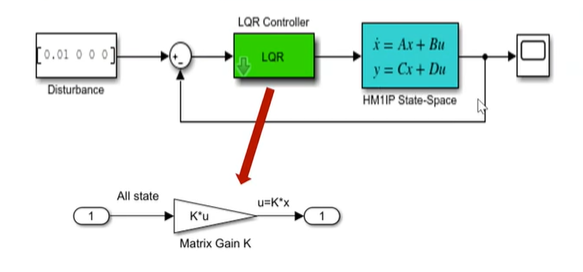
· 最后,设计LQR控制算法,选择不同的Q矩阵和R矩阵,将LQR控制算法部署到cSPACE控制系统中,CSPACE控制系统通过传感器获取倒立摆的状态,串口通信接受四个状态值,执行LQR算法,完成一级倒立摆的实时控制。
· 除此之外,本课程还提供了很多种工具的使用方法(如Matlab Coder、Simulink、倒立摆工具箱),以及如何联合不同的工具进行仿真建模,如MATLAB与cSPACE控制系统通过串口通信等。
期望大家通过对本课程的学习,能掌握直线电机一级倒立摆的建模、仿真与控制的开发,以及了解Simulink/Simscape、串口通信及其他各种工具的使用及开发,进而自主使用不同的仿真工具联合创新开发,熟练掌握LQR最优控制、simulink等相关算法。
本课程的独特之处在于有多位资深科研人员和工程师参与课程研发与讲课,除了提供更专业的课程、在线答疑,同时还提供开源的实验平台。除了本课程所讲述的实验案例之外,我们的新版倒立摆平台新增了智能控制领域的控制算法,如模糊控制、滑模控制和BP神经网络控制等。对于想深入研究的学员,欢迎到深谷学院实地考察交流。
精彩内容
利用牛顿方程建立直线电机一级倒立摆的数学模型,得到倒立摆系统的状态空间方程;然后针对倒立摆系统设计LQR控制器,并在MATLAB/Simulink中搭建系统控制器仿真模型,观察Q矩阵和R矩阵的不同取值对倒立摆性能的影响。通过仿真结果得到提高Q矩阵对应变量值可以提高系统响应速度,提高R矩阵值可以减少系统能量损失;然后通过串口通信将LQR控制算法应用到倒立摆实体模型中,进行一级倒立摆的稳摆实时控制实验。相比于传统控制方法,直线电机一级倒立摆实验平台采用的LQR最优控制方法在实现稳定控制的快速性、减小超调量以及抗干扰能力方面均有较高的优越性。