

深谷开源移动作业机器人全新升级|3D激光SLAM和导航定位核心技术 解锁无限应用场景
发布日期:2022-10-24 浏览次数:3126
近年来,机器人的发展越来越趋向于智能化。与传统的机器人相比,具备环境感知和自主决策的智能移动机器人越来越受到关注与重视。智能机器人需要解决的最基本问题是:自己在哪里?要去到哪里?怎样安全抵达目的地?这些问题涉及到机器人的自主定位、环境地图构建、导航等关键技术。在中科深谷开源移动作业机器人上原搭载的2D激光SLAM和导航定位基础上,我们进一步升级了3D激光SLAM和导航定位技术,丰富产品功能配置,满足更多场景化功能需求。
该3D激光SLAM系统可融合GPS、IMU、Lidar三种传感器,同时具有闭环检测功能,系统主要由地面平面检测,点云滤波,前端里程计和后端全局匹配及图优化四部分组成。
其中前端里程计和后端全局匹配及图优化为SLAM系统的核心功能部分,前端里程计关键在于引入关键帧策略使其精度性能达到最佳,后端系统包含提取关键帧生成里程计约束边,读取GPS/IMU信息生成约束边,读取地面检测参数生成平面约束边,闭环检测生成闭环约束边,将以上边(Edge)统一加入Graph中并进行图优化解算以消除误差。3D定位系统是基于UKF进行位姿更新迭代的,在没有接入IMU/轮式里程计等信息下UKF中的预测过程是匀速处理,更新过程是通过NDT匹配算法将当前激光数据与地图进行匹配得到观测值来进行校正处理。
3D激光SLAM和导航定位系统核心技术点
核心技术点
01 高精度激光里程计前端技术
提出一种自适应新增关键帧策略,即科学评估当前激光帧数据与上一帧关键帧激光数据的匹配质量模型,当发现匹配质量阈值小于设定阈值时将当前帧激光数据作为新的关键帧,后续激光数据与其进行匹配,进而来最大化提升激光里程计匹配精度。02融合GPS/IMU等多传感器技术
02 融合GPS/IMU等多传感器技术
将高频的IMU数据与激光数据进行耦合,进行激光帧数据畸变校正和为激光里程计提供初始,确保里程计更加稳定可靠;同时针对室外空旷或欠约束场景融合GPS信息,并将GPS约束信息加入到图优化后端中进行图优化解算。03鲁棒的图优化后端系统技术
03 鲁棒的图优化后端系统技术
针对全局闭环匹配可能会引入错误的闭环约束边问题,根据图优化解算结果构建剔除错误闭环约束边策略,以期最大化构建出与实际环境一致的地图。04基于UKF定位系统技术
04 基于UKF定位系统技术
引入无迹卡尔曼滤波(UKF)算法作为定位系统中的位姿迭代技术,同时支持融合GPS/IMU等传感器信息,实现多传感器融合下的鲁棒定位技术。

功能演示-构建不同场景下的3d地图性能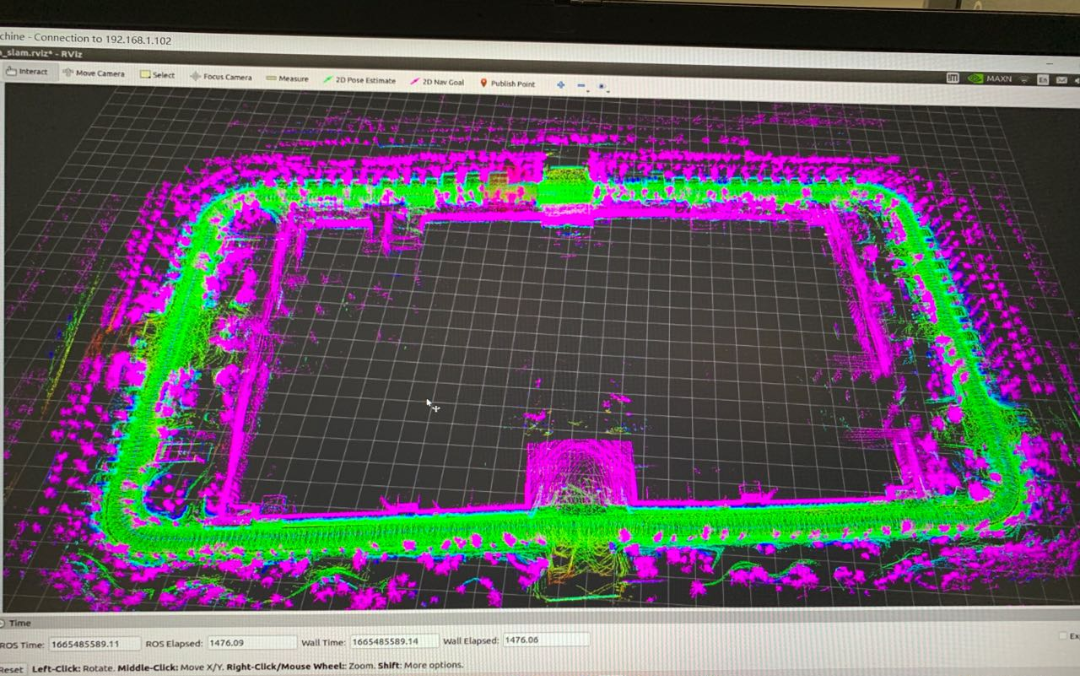
绕某院外侧道路一圈3D点云地图(长340米,宽200米)
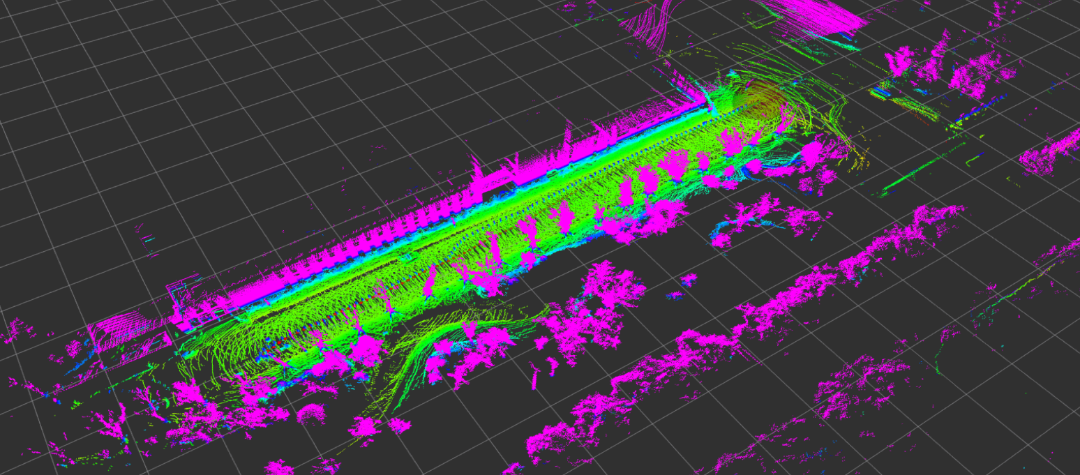
某院北侧道路3D点云地图(长120米)
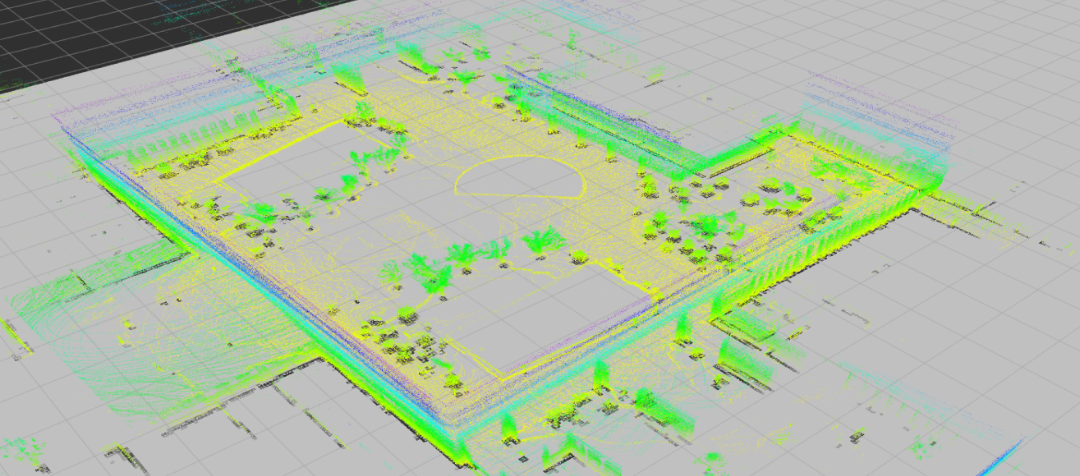
某院中庭3D点云地图(长120米,宽100米

某公司办公区三楼长走廊区域(长120米,宽8米)
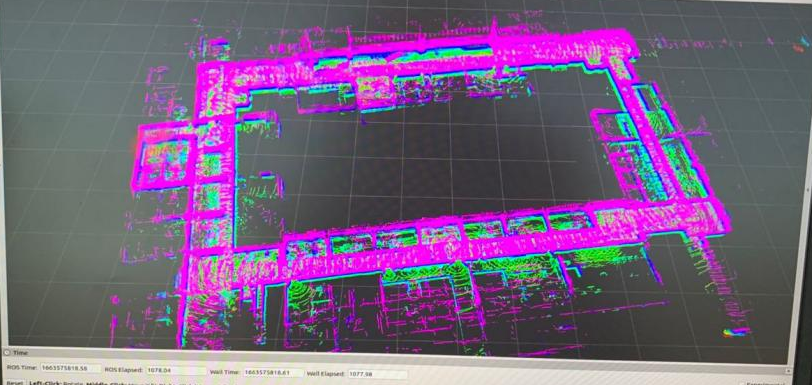
某公司环形走廊区域(长120米,宽80米)
经典应用案例分享
某省农科院基于深谷视觉的番茄采摘机器人
在果蔬种植过程中,农业科技学院信息中心技术人员发现,虽然果蔬大棚数据监控、检测等均可实现自动化,但果蔬采摘作为农业生产中的重要环节,目前还依赖于大量劳动力的参与。随着我国人口老龄化的日益加重,导致劳动力成本攀升,同时现代农业往着设施化、机械化和智能化的方向发展,传统的依靠大量劳动力的果蔬采摘模式已经不能满足未来农业发展的要求,同时结合团队发展需要,急需开展设施果蔬采摘机器人相关研究。
为了寻求解决方案,农业科技学院信息中心进行了详细的调研,发现中科深谷果蔬采摘机器人具有很好的通过性和自主性,其视觉采摘技术满足他们以代替人工进行采摘的需求。中科深谷自主研发的四驱四转视觉采摘机器人在无轨道无外部路标情况下,可以在狭窄农业环境中的作业,具有很强的通过性和自主性,Slam定位下的自主导航技术、视觉识别技术,实现了番茄采摘机器人的控制及视觉抓取功能,可代替人工进行水果采摘,为智能果蔬的无人化生产奠定基础。
某省无人化智能农业分拣作业系统
面对智慧农业领域多样化的市场需求,越来越多的企业已经不仅仅满足于单纯的采摘或分拣环节自动化,而是希望能够通过一体化的管理,解决多环节松散耦合带来的困扰,实现时效性、成本和效率兼顾的全流程自动化。
凭借着多领域产业布局的优势,中科深谷推出全柔性农业智能分拣作业系统,通过无人驾驶智能采摘平台与基于深度学习的自动拣选平台和无人化智能仓储及协同控制系统组合,实现客户一站式实现采摘、运送、分拣、存储环节的全流程自动化的需求。该系统可以根据实际需求灵活扩展,兼具高柔性、高效率和高准确性的优势。
在中科深谷协同控制系统的支持下,无人驾驶智能抓取平台与无人控制开源识别平台和仓储货架及控制系统协同合作,采摘、运输、识别、存储环节均无需人工操作,进一步提升整体效率和自动化能力、降低配送成本。
某航空航天院双臂协作智能机器人装配系统
目前我国总装生产过程大部分采用手工模式装配,总装过程对操作人员技能要求较高、工作量大、劳动强度高,安装装配周期长,而且较容易出现碰撞损伤和返工现象,产品质量不易保证,生产效率提升困难,延续当前的生产制造模式远远不能满足航天装备总装生产需求。
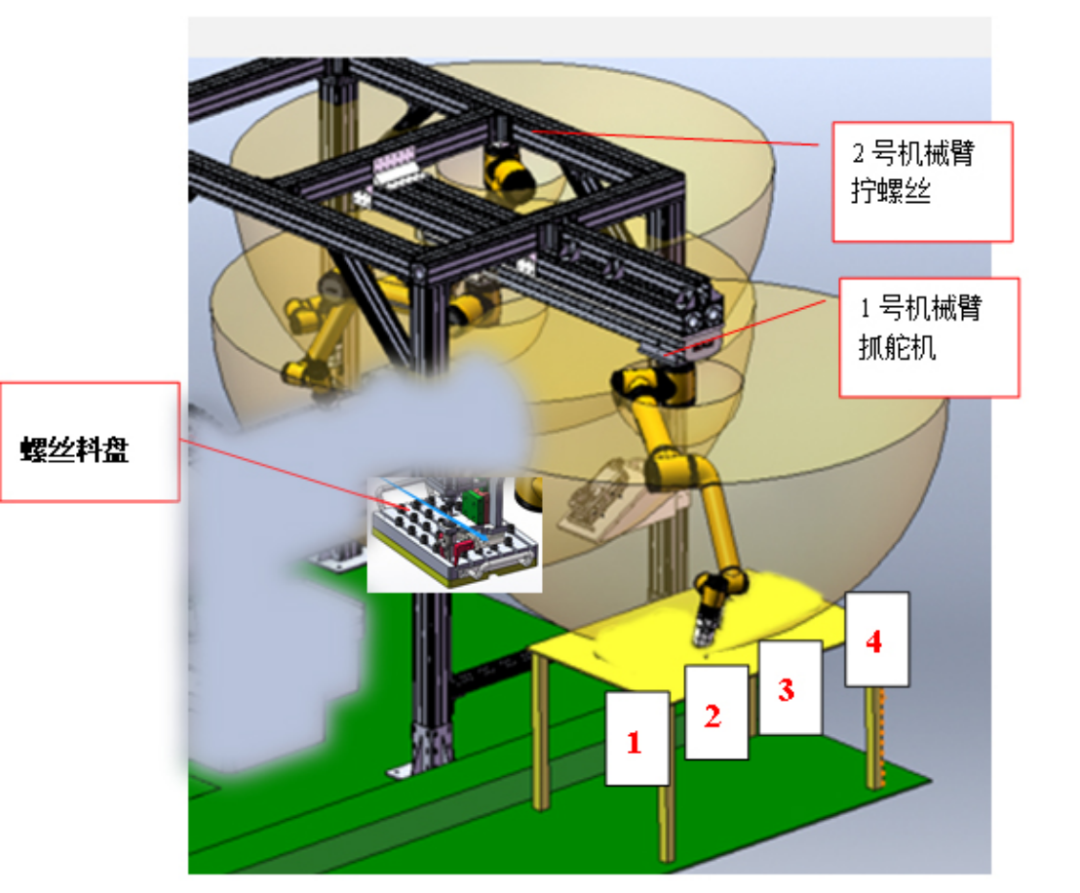
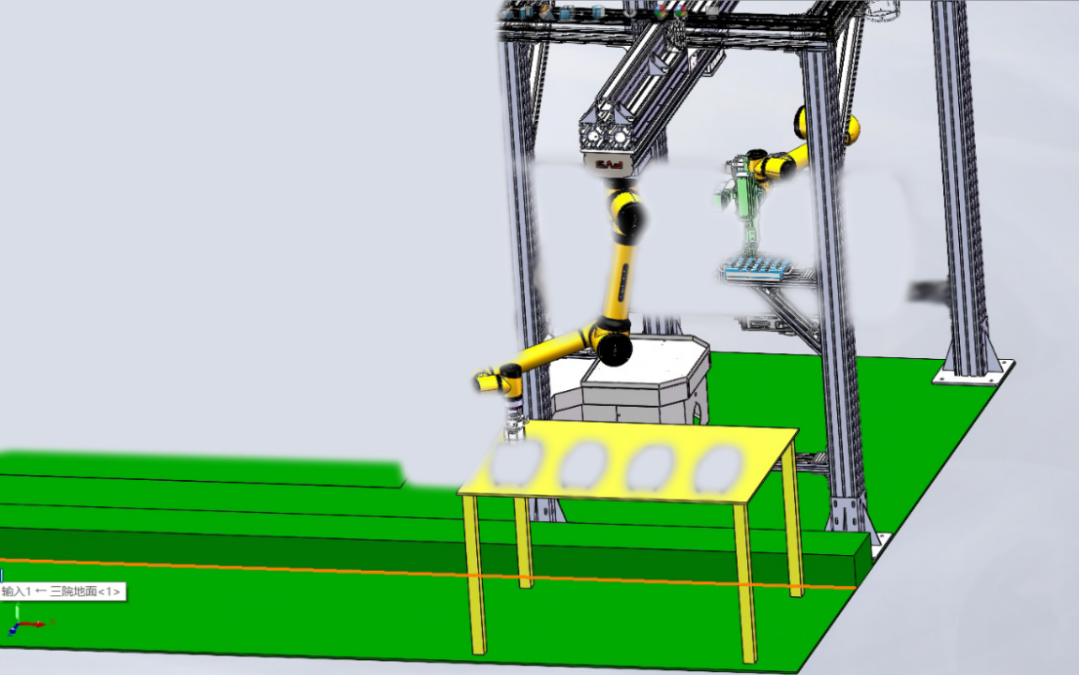
如何稳定、高速、高效、高安全的完成航天装配成为目前航天航空领域迫切需要解决的问题。中科深谷结合多年的积累,深入研究从协作机器人的本体结构、伺服驱动器、总线通讯、控制系统、运动学与动力学算法、柔顺控制、3D视觉、融合深度学习算法的3D视觉的开源算法为某航天航空单位实现有人参与以及无人参与的自动化某武器关键核心配件的安装,待装配部件加装定位销,实现精密装配。通过对该项目的研究,助力航天装备装配效率和装配精度提高和生产制造水平能力提升,从而更好地满足现代战场对航天装备快速响应制造能力需求。
中科深谷聚焦用户端,从场景剖析、结构式、软硬件开发等不同维度出发,不断探索与创新。我们秉持着为客户服务、实现客户价值的理念,不断精细打磨产品,优化产品细节。


