重庆大学教授陈锐|3D视觉及其在协作机器人中的应用
发布日期:2022-11-01 浏览次数:2706
工业机器人作为我国工业发展的重要支撑,如今在制造和物流等领域的应用越来越广泛,而3D视觉作为工业机器人的“眼睛”,已成为影响工业机器人领域应用和性能的关键因素。如何通过3D视觉控制技术来提高工业机器人工作的精度、速度及可靠性,已成为国内外关注的焦点。本文中,笔者将通过对3D视觉技术特点以及发展现状等方向来对其进行介绍。
对于机器人,让工业机械手或机器人“睁开”一双眼睛,机器视觉为它们提供了精密的计算系统和处理系统,可以模拟生物视觉成像和信息处理方法,从而使机器人更像人类,并且可以灵活地执行操作,识别,比较和处理方案,生成执行指令,然后一次性完成所有操作。
这是传统机器人目前无法实现的动作,这使得机械手在功能开发和领域扩展方面取得了重大突破。视觉机器人将在未来十年中在智能设备领域占据重要地位。机器视觉作为机器人(尤其是智能视觉机器人)的重要组成部分之一,对于提高机器人的灵活性和可操作性具有重要意义。
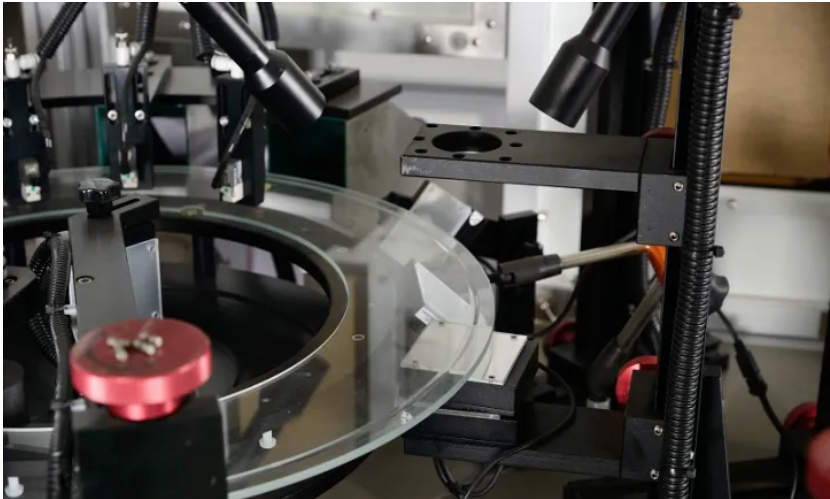
3D视觉识别实验
机器视觉
将在未来的工业机器人领域中广泛使用,
显著功能包括以下四点:
01 引导和定位
视觉定位要求机器视觉系统能够快速,准确地找到被测零件并确认其位置。上下料使用机器视觉进行定位,并引导机械手臂准确地抓住它。在半导体封装领域,设备需要根据通过机器视觉获得的芯片位置信息来调整拾取头,准确地拾取芯片并进行绑定。这是视觉定位在机器视觉行业领域中最基本的应用。
02 外观检测
检测生产线上产品的质量,这也是取代人工最多的环节。在涉及机器视觉的化工产品包装领域,其主要检查包括尺寸检测,瓶子外观缺陷检测,瓶肩缺陷检测,瓶口检测等。
03 高精度检查
某些产品具有较高的精度,例如高度集成的电子电路板,可达到0.01~0.02mm甚至um级。人眼无法识别,必须用机器来完成。
就是利用机器视觉来处理,分析和理解图像,以识别各种模式的目标和对象。可以跟踪和收集数据。广泛用于汽车零件,航空零件,塑料零件,五金零件等。
现在3D视觉比较常用的成像方法有以下几种:

立体视觉法原理图
02 结构光法
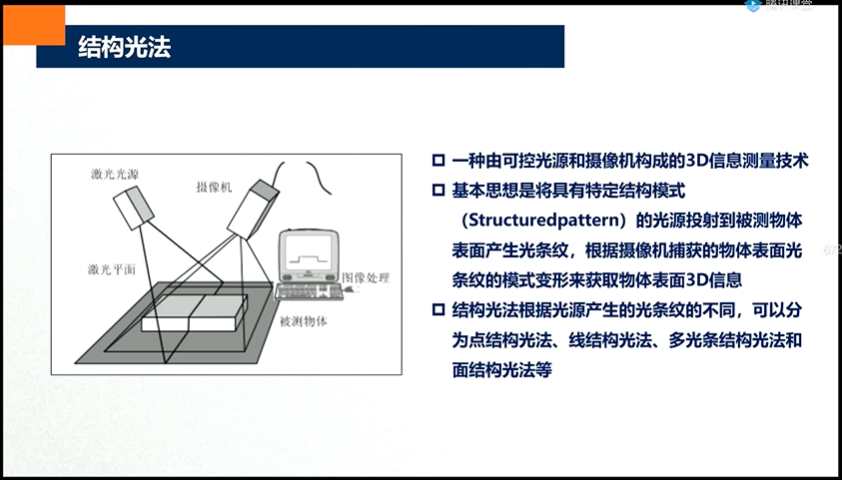
结构光法原理图
03 激光扫描法
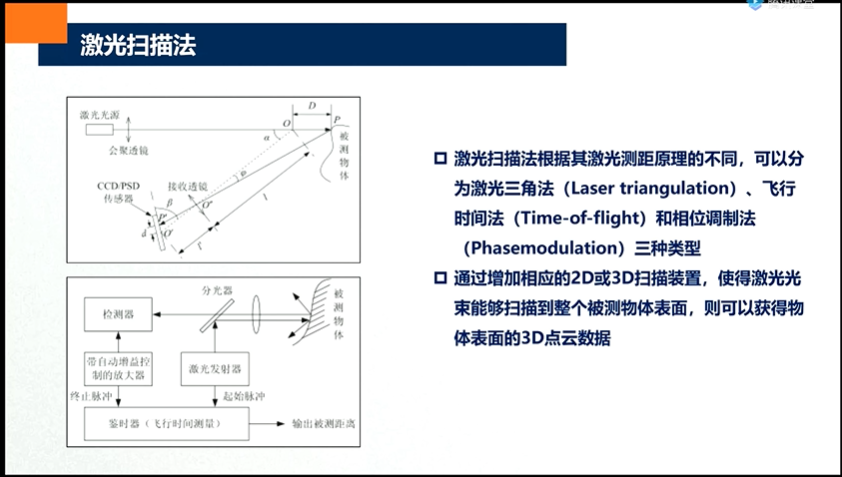
激光扫描法原理图
通过前面的介绍,我想大家也应该对3D视觉有所了解了,如何在实际环境中使用3D视觉,又会存在哪些困难呢?
今天给大家推荐重庆大学陈锐副教授的课程《3D视觉及其在协作机器人中的应用》,本讲座点击文尾的阅读原文即可加入学习。本课程全面介绍了3D视觉,内容涵盖:人工智能、3D视觉发展现状、3D视觉在协作机器人中的应用、3D视觉的成像方法、3D视觉的标定方法、3D视觉机器人应用的实例。本课程最大的亮点在于不仅仅只是介绍3D视觉的发展与原理,而是通过其在协作机器人中应用实例来讲解在实际操作环境中如何正确的使用3D视觉。

3D视觉在协作机器人中的应用-课程亮点
3D视觉在协作机器人中的应用-课程亮点

陈锐
重庆大学副教授,重庆大学机械工程院副院长
主要研究领域包括软体机器人设计与控制、智能柔性材料与驱动、机器视觉与机器学习、特种机器人等,以此推动力学与材料、控制、信息、计算机、医学等的多学科交叉研究。作为负责人主持了国家自然科学基金项目、重庆市基础与前沿研究计划项目、中央高校业务费重点项目、新进优秀青年教市项目、机械传动国家重点实验室主任基金等项目。作为主研人参与国家自然科学基金重点项目、国家科技支撑计划项目、工信部智能制造专项项目、重庆市重点产业共性关键技术创新专项等项目多项。以第一作者或通讯作者在 "Soft Robotics" / “Advanced Materials Interfaces" / "Smart Mtaterials and Sturctures” 等国际知名期刊上发表论文20余篇,申请专利30余项,软件著作权3项。
课纲简介
·为什么选择3D视觉
·3D视觉与机器人
·3D视觉技术
·未来研究方向
深谷学院
深谷学院是高品质的免费开放的人工智能与机器人专属学习平台,联合国内外多名教授、专家学者、资深工程师,提供线上线下专业的机器人、人工智能、智能制造相关课程。线上线下累计学习人次达50万人次。
深谷学院致力于赋能开展人工智能与机器人产业化应用的中高端人才培养,搭建中高级产业人才培养赋能生态,服务中国教育。