

合肥工业大学教授都海波|飞行器姿态控制
发布日期:2022-11-03 浏览次数:3185
经过一个世纪的发展,各种飞行器如雨后春笋般出现,从飞机、导弹到火箭、卫星,从宇宙飞船、航天飞机、空间站到月球探测器、火星探测器。这些飞行器能在空中按预定的轨迹运动总离不开它的姿态控制系统,飞行器在空间的运动是十分复杂的。以下就飞行器姿态控制方法中的算法研究和多四旋翼一致性控制算法研究等方面展开介绍,并为大家推荐合肥工业大学教授都海波的《经典控制机电系统开发(飞行器姿态控制)》精品课程。本讲座点击文尾的阅读原文即可加入学习。
01 姿态控制系统建模
为简化过程,仅研究在刚体运动学模型下,姿态控制器的设计,由于自身结构,外部环境以及不可预测故障给飞行器姿态运动带来扰动,需利用前馈补偿,设计干扰补偿器,减小扰动对系统性能的影响。为了确保安全,飞行器对轨道跟踪精度以及最终的入轨精度都有非常高的要求,飞行器的高精度姿态控制是其跟踪效果和入轨精度的最根本保障。姿态控制系统是关系飞行器飞行成败的关键系统之一,其控制过程和方法一直是人们重视和关注的问题,它贯穿于飞行器的设计.使用.储存的整个生命周期。因此研究飞行器姿态控制系统、控制方法具有重要的作用和意义。飞行器相对惯性空间的姿态,用欧拉角p、l、y表示,飞行器坐标系在惯性坐标系中的位置构成了飞行器在惯性空间内的姿态角。飞行运动方程是基于常质量和变质量刚体及质点的一般规律来建立的,用以描述飞行器或其部件:的运动,实际上在短周期的绕质心运动时还有弹性力、推进剂晃动力和发动机惯性力的作用。它们是分析飞行器控制稳定性所关心的问题,而在大多数情况下认为飞行器是变质量刚体。
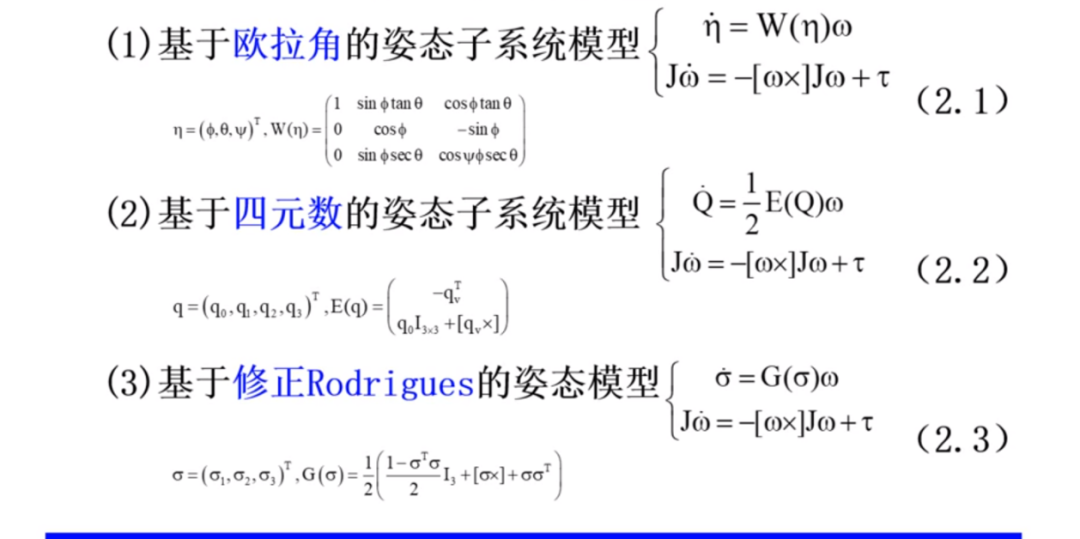
控制系统模型
02 姿态控制算法研究
飞行器姿态控制系统是实现飞行器平台标准化的关键技术之一,同时也是飞行器分系统中一个不可或缺的组成部分。成功地设计姿态控制系统对飞行器的稳定在轨运行至关重要。飞行器姿控系统是一个比较复杂的动态系统,受到诸多因素的影响,姿态控制算法设计存在诸多难点:(1)惯性传感器噪声大(2)姿态模型高度非线性、强耦合。
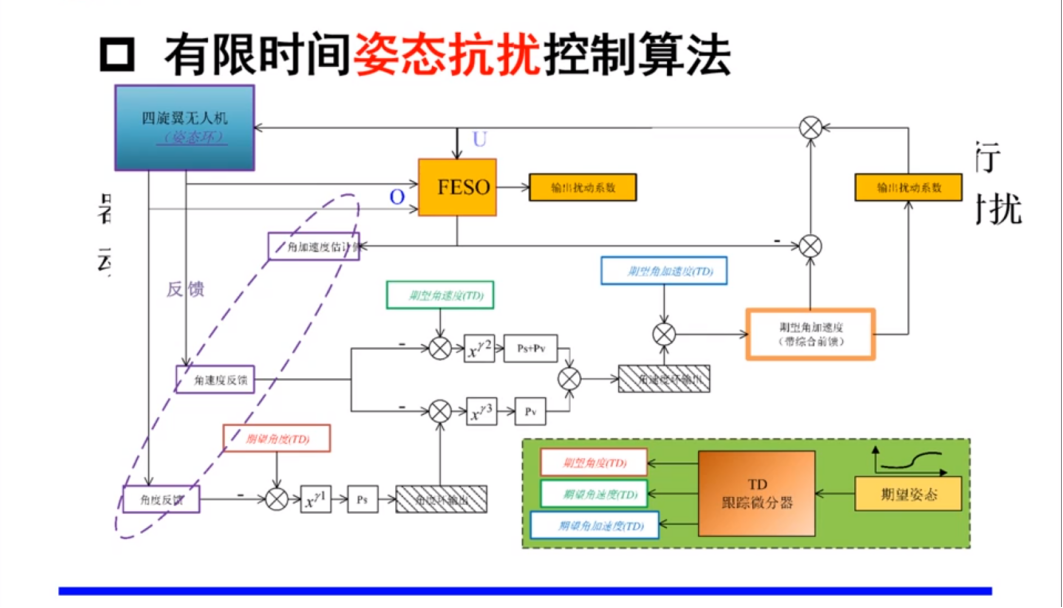
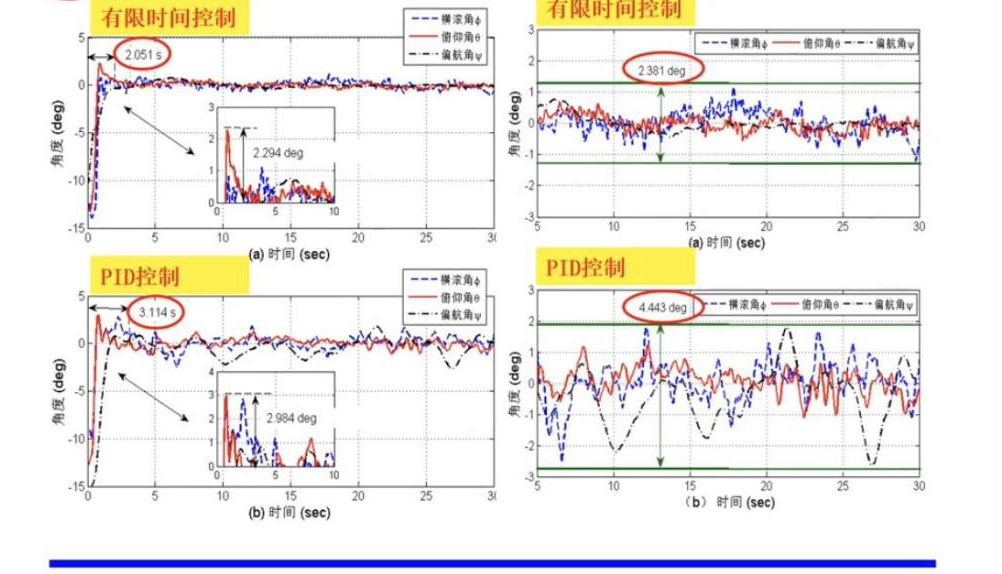
有限时间姿态抗扰控制算法
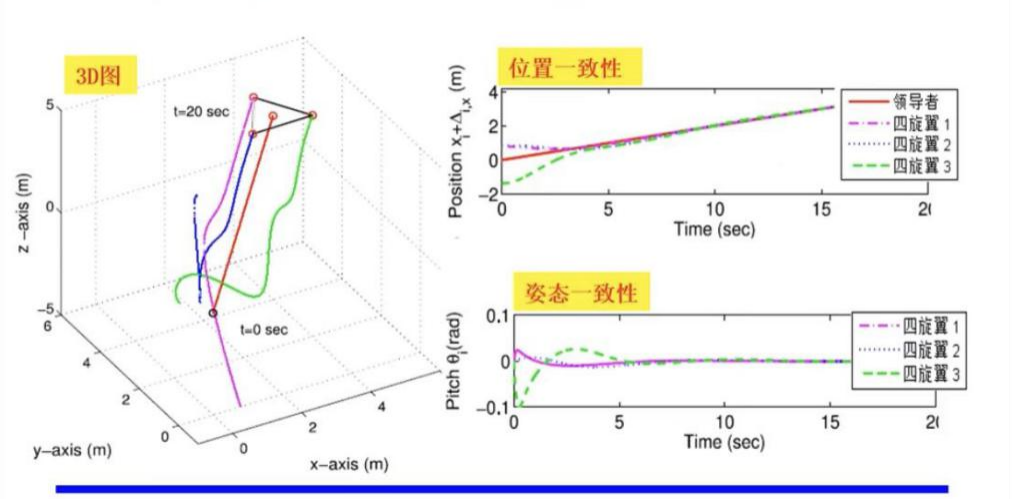
03 多四旋翼一致控制算法研究
四旋翼飞行器具有简单的刚体结构,如下图所示,其主体结构为两根垂直相交的支架,在两根支架的四个端点处分别有一个电机并配有旋翼,机身上还包括一些其他设备,如电池、传感器、控制器等必要元器件。四旋翼无人机的升力主要靠四个电机驱动四个旋翼旋转产生。如下图所示,在四旋翼无人机四个旋翼中,旋翼(1,3)为一组,(2,4)为一组。为了克服旋翼旋转所产生的反转扭矩,通常控制其中一组旋翼向一个方向旋转,控制另一组旋翼向相反的方向旋转从而产生相反的旋转力矩。
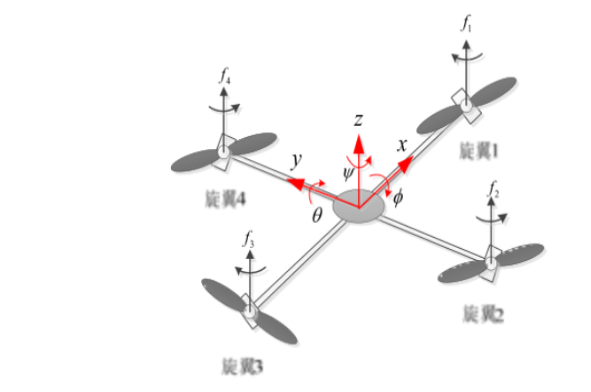
多四旋翼模型
都海波教授在本课程《经典控制机电系统开发-飞行器姿态控制》中着重介绍了常用的姿态描述方式,对其优缺点进行全面的阐述,对于初次接触该研究领域的人员有着较好的指导作用。以具体实例—四旋翼无人机为描述对象,对控制系统特点(多输入、多输出,欠驱动,强耦合,非线性,静不稳定性)展开介绍,能够使读者很清楚的了解到飞行器设计领域的性能参数。
01 飞行器姿态控制
02 飞行器姿态控制
如果你也对飞行器设计感兴趣,
如果你想了解机器视觉的无人机自主飞行的知识和应用,
点击阅读原文和深谷小助一起学习吧!
都海波
合肥工业大学教授,硕导、自动化系副主任
中国人工智能学会智能空天系统专业委员会员,中国指挥与控制学会网络科学与工程专业委员会员,自动化学报、控制理论与应用、中国控制会议申稿人。致力于非线性控制理论及其应用、机器人控制、多智能体方面研究。主持国家自然科学基金2项,省部级项目4项,人才项目2项,其它课题4项,主研企业委托类课题多项。在国际 Springer出版社出版英文专著章节 (Book chapter)1篇,科学出版社出版中文专著 1 部,发表期刊和会议论文90+篇,其中SCI期刊论文50+篇,2014年获教育部自然科学二等奖。
课纲简介
·飞行器的系统建模
·飞行器的算法研究及验证
·飞行器编队最优控制
深谷学院
深谷学院是高品质的免费开放的人工智能与机器人专属学习平台,联合国内外多名教授、专家学者、资深工程师,提供线上线下专业的机器人、人工智能、智能制造相关课程。线上线下累计学习人次达50万人次。
深谷学院致力于赋能开展人工智能与机器人产业化应用的中高端人才培养,搭建中高级产业人才培养赋能生态,服务中国教育。
深谷学院 (eduvstc.cn)


