深谷技术 | 如何搭建多移动机器人系统平台实现编队
发布日期:2022-12-29 浏览次数:2194
单个机器人在处理这类任务时具有的成本高、效率低等弊端使得多机器人系统引起了专家和学者的关注。机器人群体相比于单个机器人在处理复杂任务时,具有鲁棒性强、灵活性好以及效率高等优点。其中的多机器人协作由于涉及路径规划、目标搜索、任务分配、目标跟踪、编队控制等多项关键技术而成为研究多机器人系统的重要途径和平台。
多移动机器人系统的构成
多移动机器人系统是实验环节的依托,主要包括 3 台移动机器人、一台笔记本电脑及相关软硬件部分构成。
按照各个部分的功能将多移动机器人系统划分为通信层、监控显示层和对象层,其中的通信层将各个层次串联起来,形成一个整体的框架,如图所示。

图|多移动机器人系统层
对象层主要包括 3 个移动机器人,移动机器人主要负责采集现场的信息,即识别目标物与障碍物,并依赖于自身的工控机进行协作决策和规划,是整个任务的最终执行者。如图是移动机器人硬件组成。
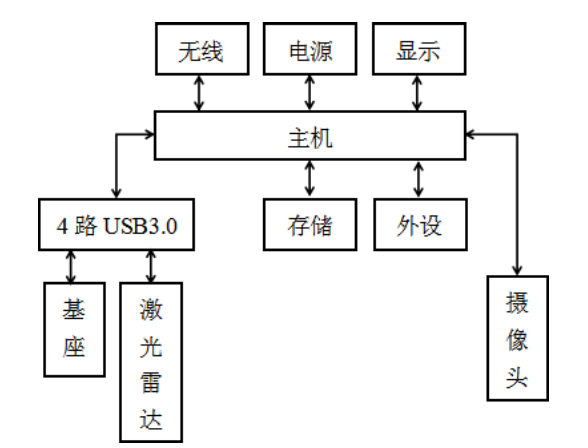
图|硬件组成
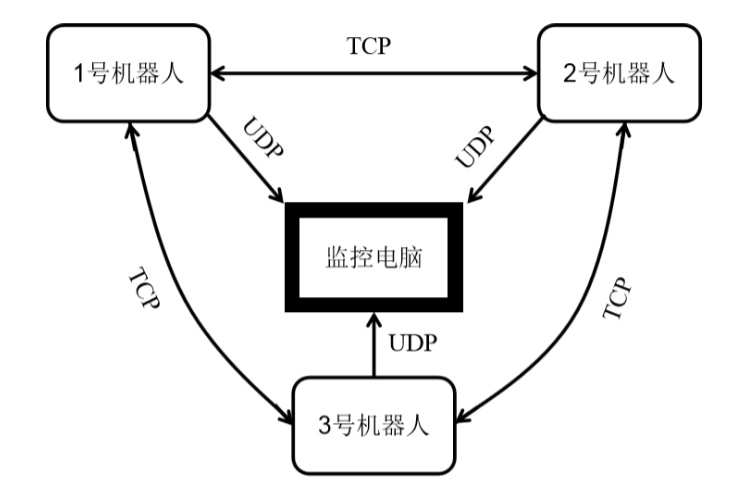
通信层作为信息传播的有效载体,一方面将机器人信息和目标物的信息打包成数据帧,并发送给其它机器人,实现了机器人之间信息互通,另外一方面将各个机器人采集到的视频信息经压缩编码后传输到监控显示层。如图是通信网络结构。
图|通信网络结构
其中,对于机器人之间的通信采用TCP协议。TCP协议是基于字节流面向连接的传输协议,可以实现稳定、可靠的数据传输。机器人与监控电脑之间的通信内容为视频流信息,对传输的实时性要求较高而对可靠性要求不高,因此,机器人与监控电脑之间的通信采用UDP协议。UDP是基于数据报的无连接的传输协议,精简的机制可以保证传输数据的实时性。
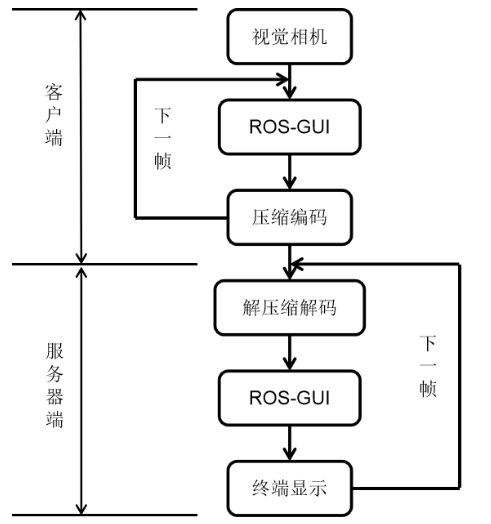
监控显示层首先将接收到的视频信息进行解码、解压缩,然后将视频信息传入ROS-GUI 中用于后台显示与分析,另外可以将接收到的视频信息保存到指定盘符形成记录资料。如图为监控层工作流程。
图|监控层工作流程
多移动机器人系统平台硬件方面已经搭建完成,便可以基于这个平台实现算法层。算法层我们采用的是简单且高效的领导-虚拟跟随法。
领导跟随法下的编队保持控制是一种主从式的编队控制系统,在N个机器人组成的系统中,选取一个作为领导机器人,其余N-1 个均为跟随机器人,整个系编队的主轨迹主要由领导机器人来决定,为了控制系统的误差,本文引入虚拟跟随机器人,跟随机器人按照领导机器人生成的虚拟机器人的轨迹来运动,这样就把N个机器人编队协作问题,转化为N-1 对机器人的轨迹跟踪问题。
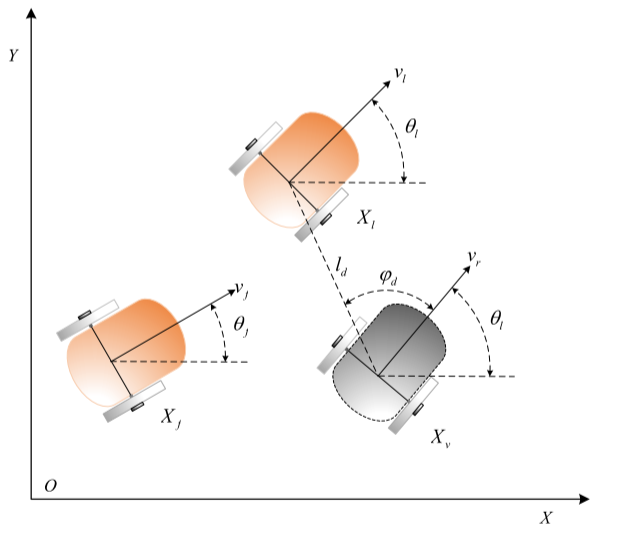
图 | 加入虚拟机器人的领导-跟随编队控制系统
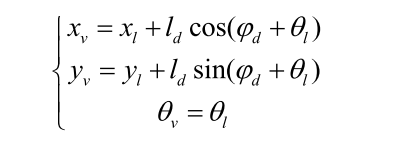
以两个机器人为例,来说明加入虚拟机器人的编队控制系统。假设虚拟机器人用XV表示,虚拟机器人的实时位姿qV=(xV,yV,θV)T,领导机器人用Xl表示,领导机器人的实时位姿ql=(xl,yl,θl)T,跟随机器人用Xf表示,跟随机器人的实时位姿qf=(xf,yf,θf)T,φd和ld分别为领导机器人与跟随机器人之间期望的角和期望的距离。虚拟机器人Xv的坐标可用领导者的坐标表示为:
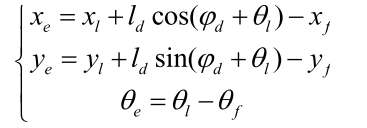
跟随机器人Xf与虚拟机器人Xv的之间的误差可以表示为:
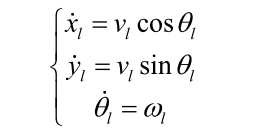
领导者的运动学模型可以表示为:
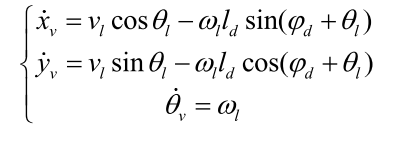
根据以上,虚拟机器人Xv的运动学模型可以表示为:
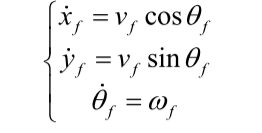
跟随者的运动学模型可表示为:
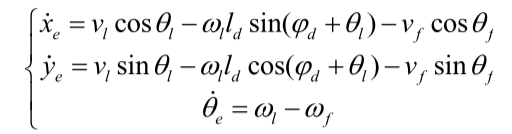
所以相对误差的运动学模型可以表示为:
然后,可以用matlab复现此算法以验证算法合理性。
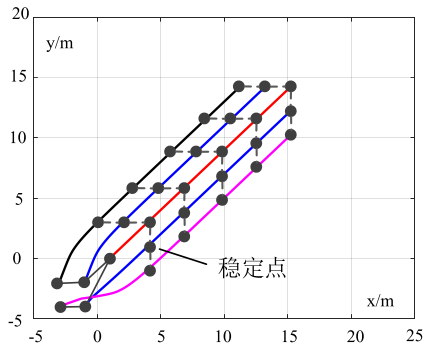
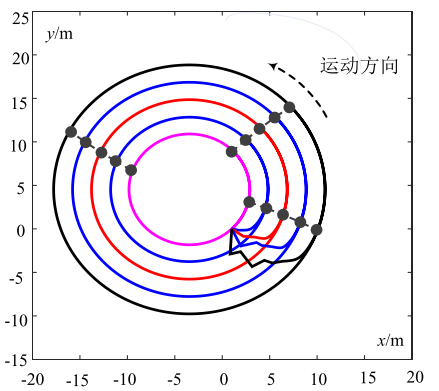
图 | V字和同心圆编队仿真
综上,对多移动机器人系统平台如何搭建并实现编队进行了介绍,首先,阐述了多机器人系统的框架,主要包括对象层、通信层和监控显示层,其次对多机器人协作系统的各层及相关硬件进行了描述后,介绍多机器人协作系统的监控层工作流程,最后介绍了基于多移动机器人系统平台搭建编队算法。通过这篇文章,对于想动手搭建多移动机器人系统平台并实现编队的研究人员有一定帮助。
深谷学院
深谷学院是高品质的免费开放的人工智能与机器人专属学习平台,联合国内外多名教授、专家学者、资深工程师,提供线上线下专业的机器人、人工智能、智能制造相关课程与服务。线上线下累计学习人次达20万人次。
深谷学院致力于打造机器人爱好者的开源社区。深谷学院致力于赋能开展人工智能与机器人产业化应用的中高端人才培养,搭建中高级产业人才培养赋能生态,服务中国教育。