深谷产品课堂——开源智能两轮平衡车产品学习和操作
发布日期:2022-12-30 浏览次数:3500
大家好,欢迎关注深谷学院《深谷产品课堂》系列文章,在上期的课堂中,我们学习了多电机驱动控制综合实验平台的操作,本期为大家带来的是开源智能两轮平衡车产品学习和操作。
环境版本
· 主控芯片:TI TMS320F28069
· 软件版本:Matlab R2020b CCS 9.0.1
· 树莓派:树莓派PI 4B
学习目标

知识储备
首先学习两轮平衡车本体结构。
开源智能平衡车由DSP-TI28069主控板、轮毂电机底盘、转接板、移动电源、电源管理模块、陀螺仪模块、OLED显示模块、蓝牙模块、无线模块、WIFI模块、驱动模块、超声波模块、语音控制模块、4G远程模块、树莓派和摄像头模块组成。采用模块化设计,各模块通过接插件连接,可扩展其他模块。可以实现智能平衡车的平衡控制、行走控制、避障、手机APP控制、4G远程控制、语音控制、视觉识别跟随和多台调度控制功能。系统底层代码开源,控制接口开放,方便二次开发。

2.两轮平衡车的主控芯片——TI TMS320F28069
主控板采用TI公司的C2000™ Piccolo™ 32 位微控制器TMS320F28069型号芯片,最高90MHz的时钟频率,高达256KB的闪存和100KB的SRAM,并支持FPU浮点运算能力。

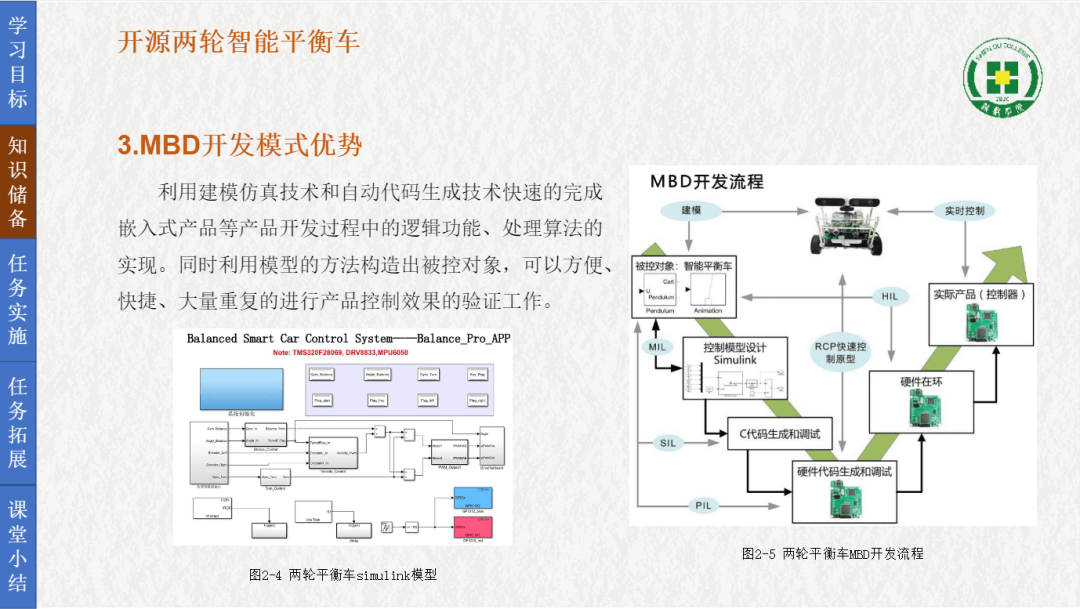
3.MBD开发模式优势
利用建模仿真技术和自动代码生成技术快速的完成嵌入式产品等产品开发过程中的逻辑功能、处理算法的实现。同时利用模型的方法构造出被控对象,可以方便、快捷、大量重复的进行产品控制效果的验证工作。
任务实施
任务实施包括以下内容。接下来分别进行讲解与演示。
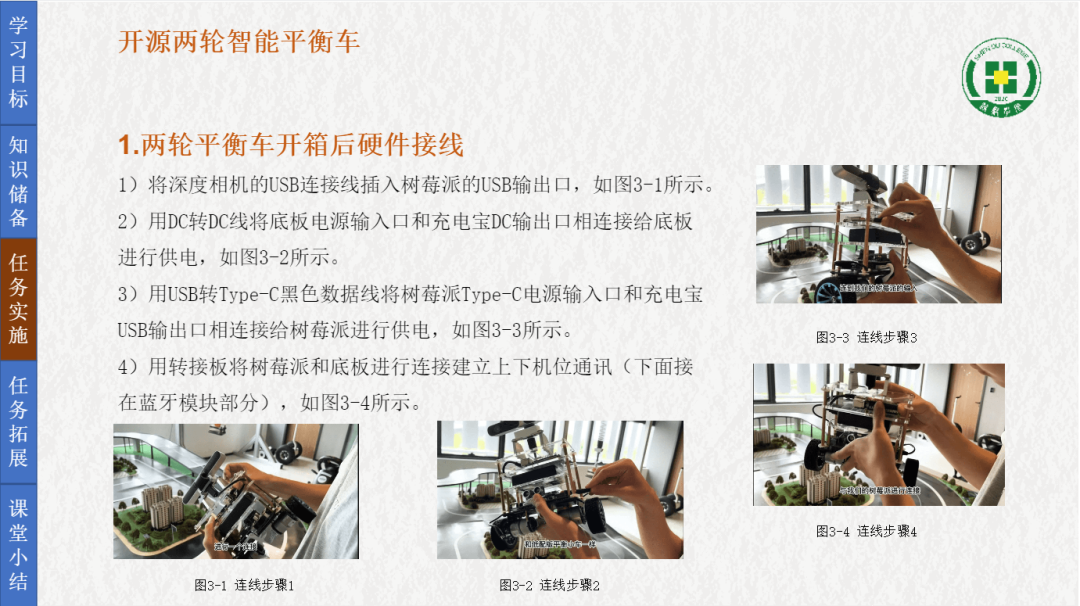
1、两轮平衡车开箱后硬件接线
1)将深度相机的USB连接线插入树莓派的USB输出口。
2)用DC转DC线将底板电源输入口和充电宝DC输出口相连接给底板进行供电。
3)用USB转Type-C黑色数据线将树莓派Type-C电源输入口和充电宝USB输出口相连接给树莓派进行供电。
4)用转接板将树莓派和底板进行连接建立上下机位通讯(下面接在蓝牙模块部分)。
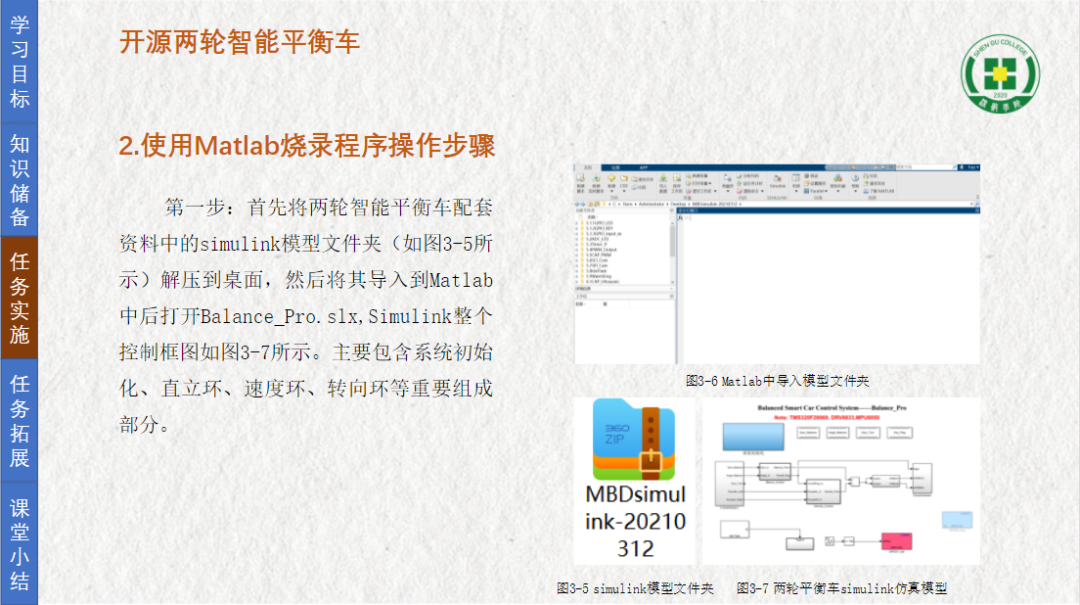
2.使用Matlab烧录程序操作步骤
第一步:首先打开PTPT第一步:首先将两轮智能平衡车配套资料中的simulink模型文件夹解压到桌面,然后将其导入到Matlab中后打开Balance_Pro.slx,Simulink整个控制框图。主要包含系统初始化、直立环、速度环、转向环等重要组成部分。
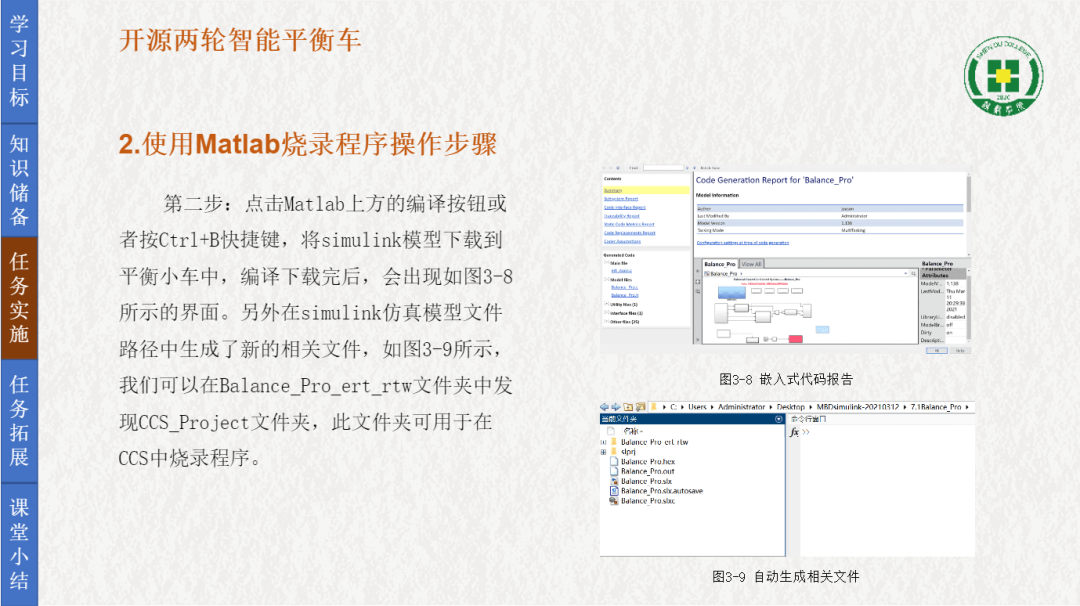
第二步:点击Matlab上方的编译按钮或者按Ctrl+B快捷键,将simulink模型下载到平衡小车中,编译下载完后,会出现如图3-8所示的界面。另外在simulink仿真模型文件路径中生成了新的相关文件,如图3-9所示,我们可以在Balance_Pro_ert_rtw文件夹中发现CCS_Project文件夹,此文件夹可用于在CCS中烧录程序。
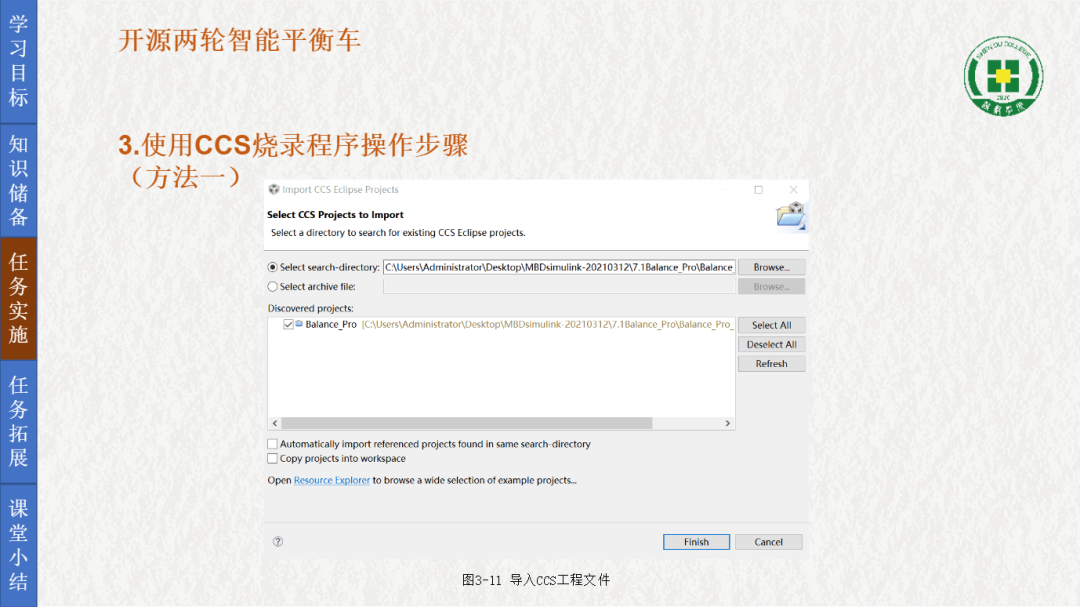
3.使用CCS烧录程序操作步骤(方法一)
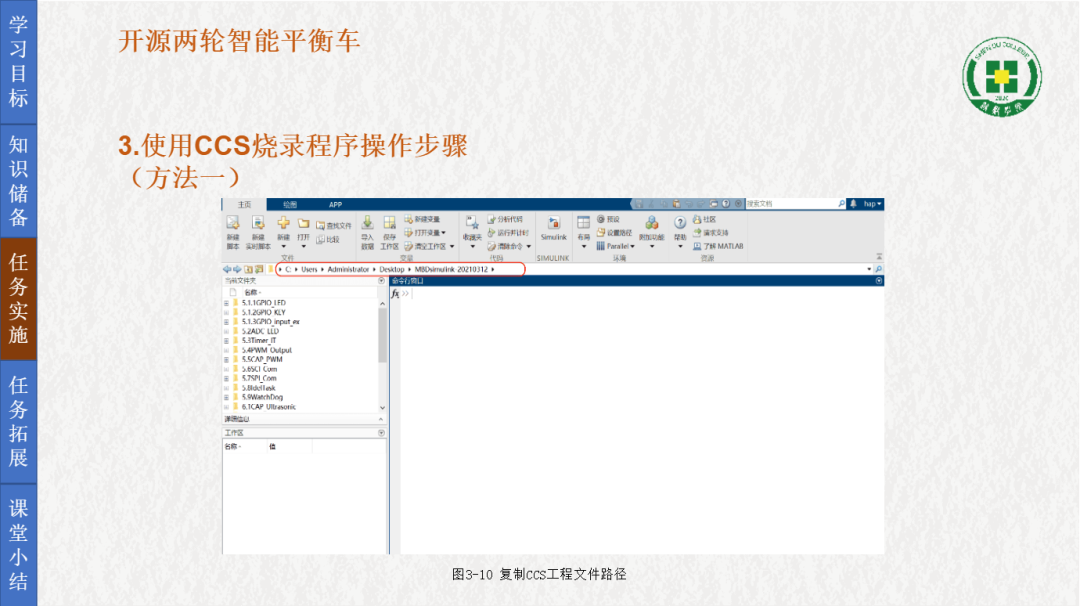
第一步:将通过Matlab生成的CCS_Project文件夹所在路径(如图3-10所示)进行复制后打开CCS,在菜单栏Project选项卡中选择“Import CCS Projects”,然后按Crtl+V进行粘贴,选中CCS_Project,点击Finish后可以发现其工程文件已经导入CCS。然后单击CCS工具栏上绿色的Debug按钮 ,就可以对工程文件进行编译、链接,生成可执行文件,然后下载到F28069控制芯片上。下载完毕后点击CCS工具栏上红色的正方形终端按钮后拔下下载线。(下载过程拔出下载线或移动小车造成接口松动容易烧毁主控板,使用时应避免出现该类操作)

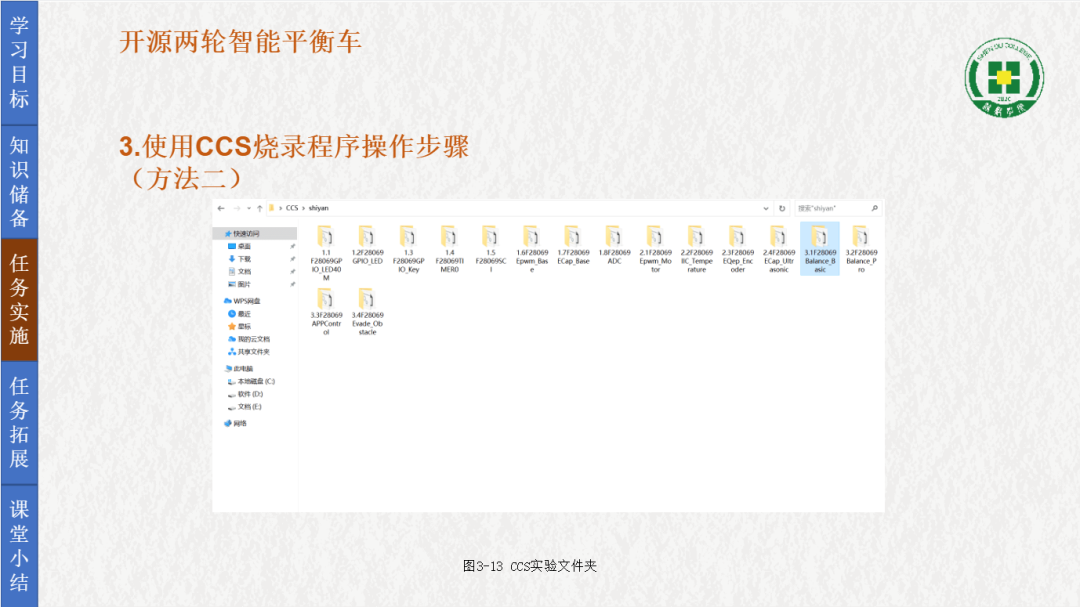
3.使用CCS烧录程序操作步骤(方法二)
第一步:将配套资料中的“04软件例程源码(CCS)”复制到桌面重命名为CCS,在菜单栏Project选项卡中选择“Import CCS Projects”,点击Browser选中“shiyan”文件夹中所需实验后点击Finish,可以发现其工程文件已经导入CCS。然后单击 CCS 工具栏上绿色的Debug按钮 ,就可以对工程文件进行编译、链接,生成可执行文件,然后下载到F28069控制芯片上。下载完毕后点击CCS工具栏上红色的正方形终端按钮后拔下下载线。(下载过程拔出下载线或移动小车造成接口松动容易烧毁主控板,使用时应避免出现类似操作)
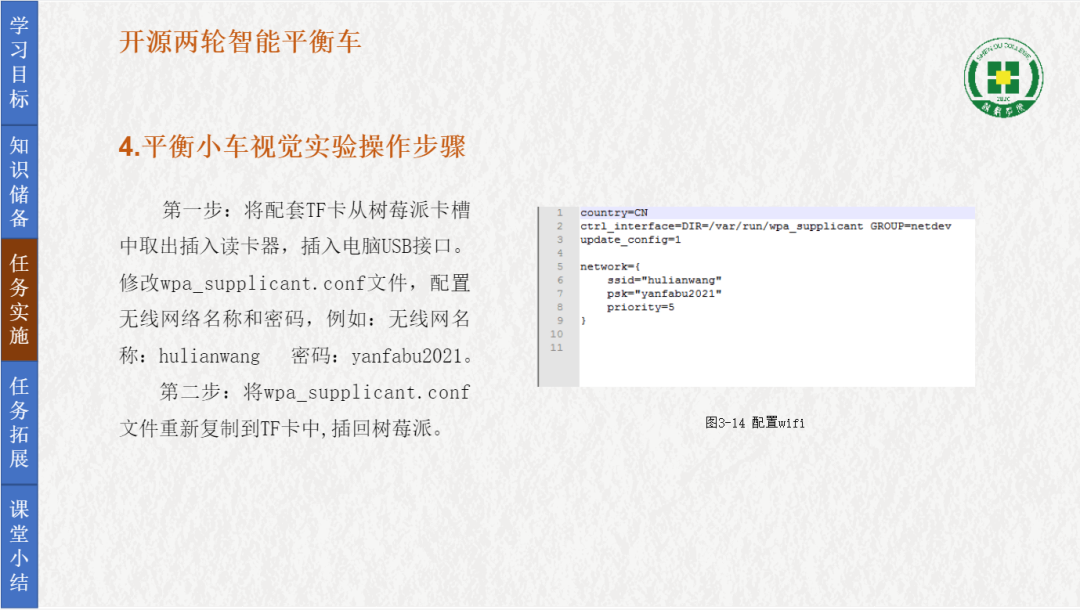
4.平衡小车视觉实验操作步骤
第一步:将配套TF卡从树莓派卡槽中取出插入读卡器,插入电脑USB接口。修改wpa_supplicant.conf文件,配置无线网络名称和密码,例如:无线网名称:hulianwang 密码:yanfabu2021。
第二步:将wpa_supplicant.conf文件重新复制到TF卡中,插回树莓派。
第三步:通过ip扫描软件获取小车ip
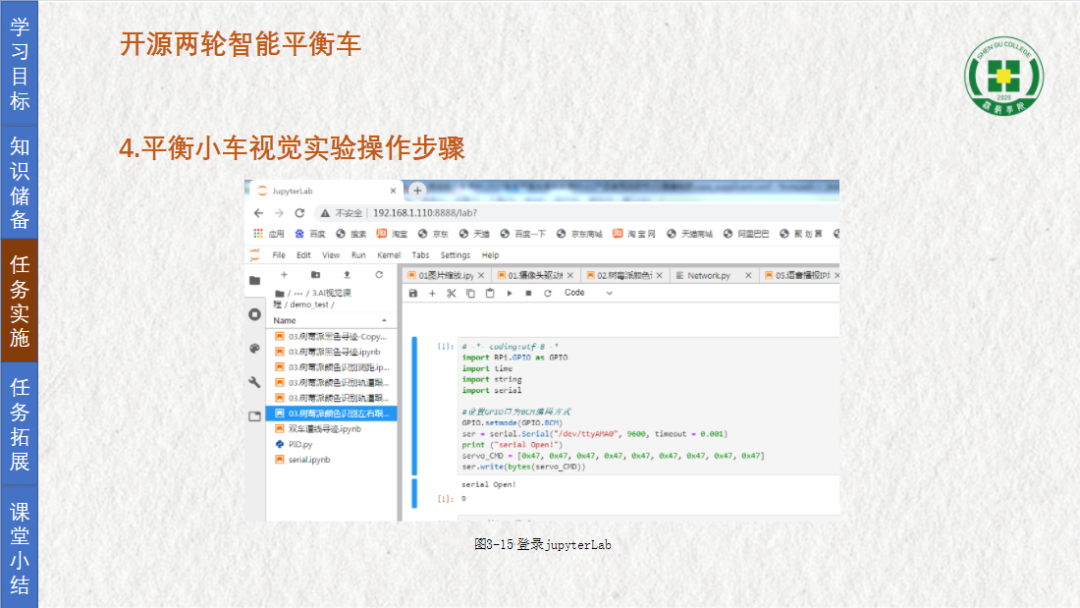
第四步:在谷歌浏览器中输入ip+8888,登录jupyterLab,密码是zksg,输入完成后显示如图3-15所示界面。
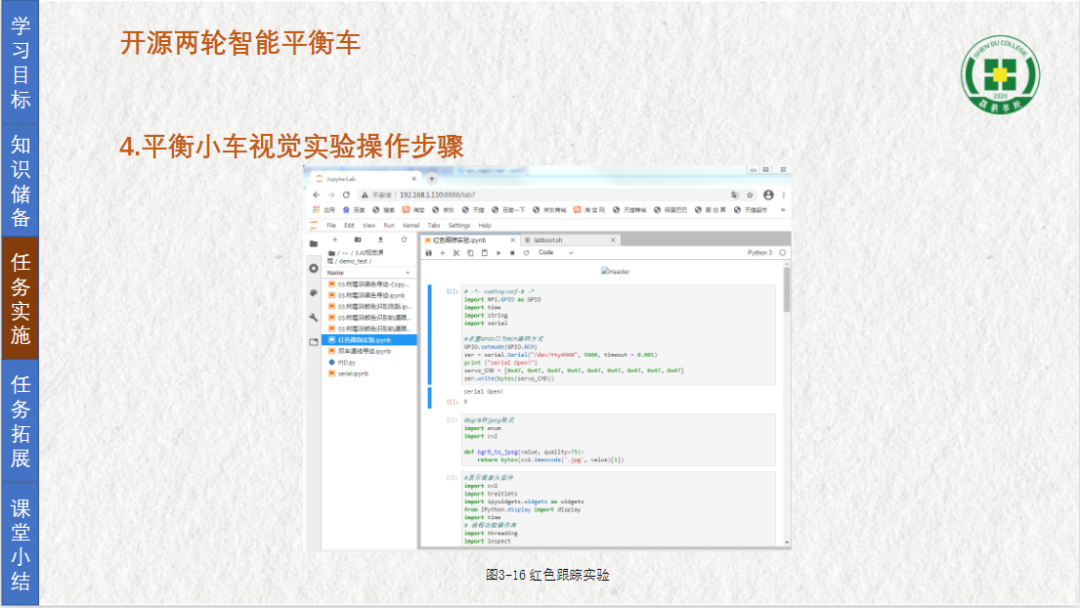
第五步:2.打开/home/pi/3.AI视觉可课/demo_test/红色跟踪实验,选择python3点击运行实验,即可实验红色跟踪, 如图3-16所示。关于实验教程和jupyterlab的使用可以参考实验文档和jupyter相关手册或者jupyter官网手册。
任务拓展
开源两轮智能平衡车
1、根据现有的模型及CCS代码,尝试搭建小车避障的simulink模型
2、尝试编写平衡小车python代码实现人体跟踪等相关支持功能。
3、尝试在树莓派上搭载ROS机器人操作系统,实现相关视觉实验。
课堂小结
1、简述两轮智能平衡车零部件结构组成。
2、会使用Matlab和CCS下载程序以及上机位视觉实验的操作步骤。
3、使用时要注意保护平衡车,避免剧烈碰撞产生摔倒。