

赋能智能建造 | 中科深谷参编《数字建造与生态发展》
发布日期:2023-07-31 浏览次数:2166
为持续提速数字建造实施落地,促进行业数字建造技术水平整体提升,日前,由中交第一航务工程局有限公司发起倡议,中国交通信息科技集团有限公司、住房和城乡建设部科技与产业化发展中心联合牵头,合肥中科深谷科技发展有限公司参与编著的《数字建造与生态发展》一书正式发布。
《数字建造与生态发展》一书中,收集了百余项优秀案例和先进技术指导工程应用实施,可较好地为数字建造体系建设、数字建造基础设施建设、新兴技术赋能数字建造、数字建造应用场景及价值挖掘、数字建造与生态发展提供参考,对推动数字建造持续发展具有重要的应用和指导意义。
近年来,中科深谷CSPACE实时仿真控制系统在机器人控制器开发领域拥有丰富的研发经验以及成熟产品,更是在建筑机器人(铺瓷砖、扎钢筋机器人)算法研究方面做了大量的工作,并将相关的关键技术、实战经验、创新亮点进行梳理、总结、提炼,为《数字建造与生态发展》一书的编著贡献了力量。
中科深谷在智能建造行业的部分案例
01
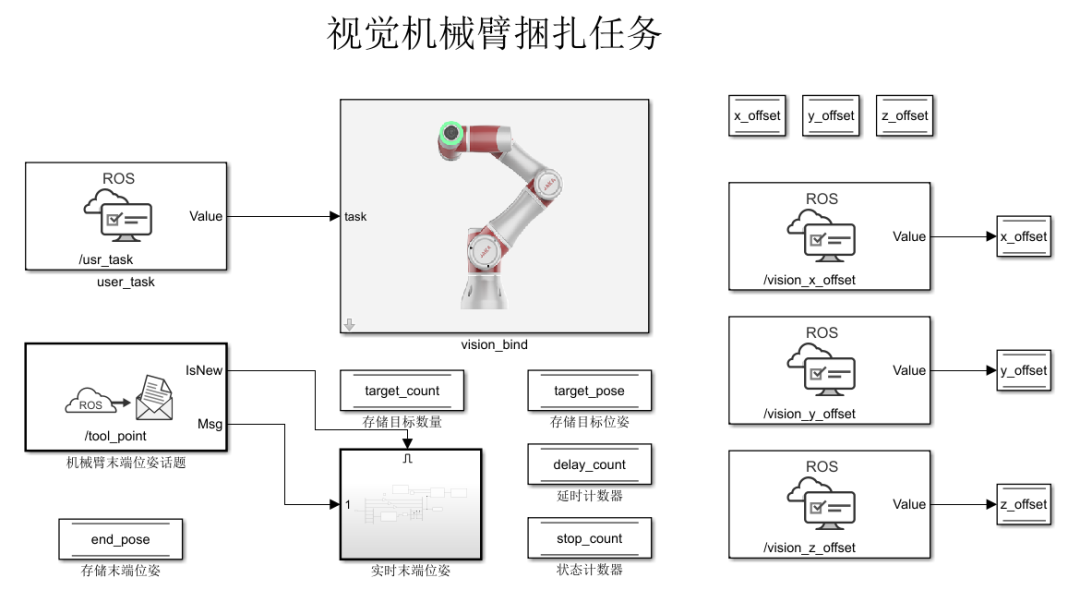
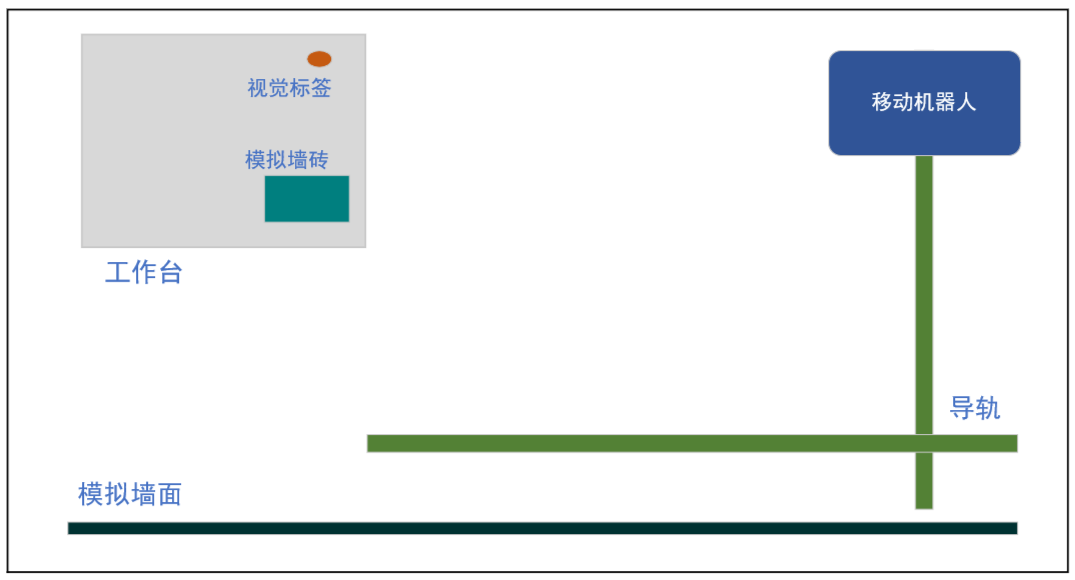
开源自动扎钢筋平台
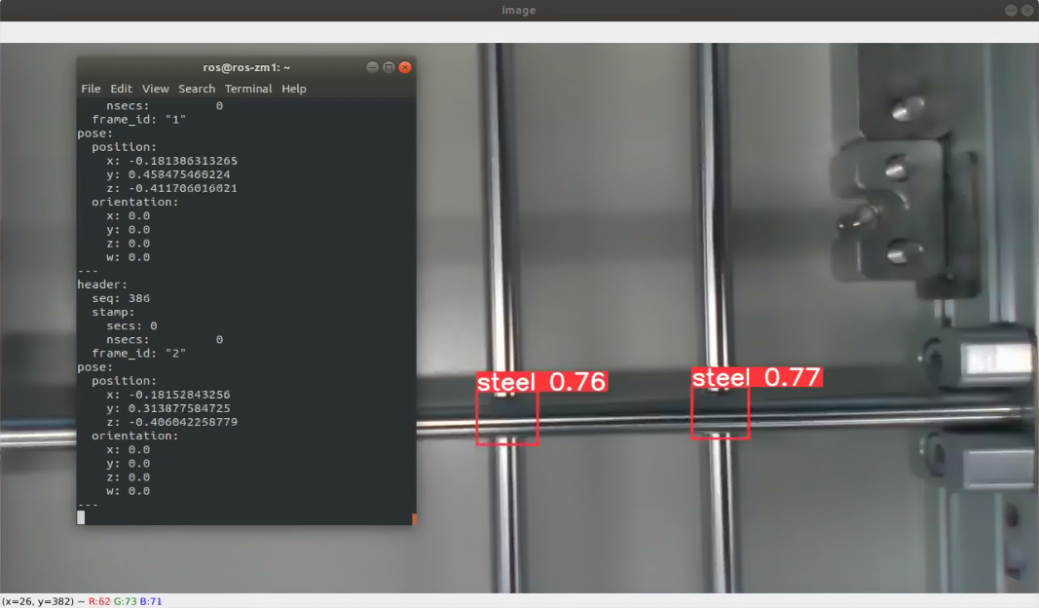
该方案通过采用CSPACE实时仿真控制系统,针对于自动扎钢筋平台,模拟了钢筋捆扎的整个流程,由钢筋捆扎台、移动底盘、六自由度协作机械臂、自动钢筋捆扎工具及视觉定位系统组成。移动底盘到达钢筋捆扎台前,根据视觉定位系统,自动识别钢筋台上要捆扎的钢筋交叉点,再通过协作臂和自动钢筋捆扎工具实现对钢筋交叉点的全自动捆扎。该平台精准地对钢筋进行识别和绑扎节点的定位,进行智能化的钢筋绑扎。以机器替代人工实现钢筋绑扎的自动化加工,具有识别智能化、操作简单化、生产效率化等特点;在其开发过程中运用了底层电机的驱动控制设计、移动机器人导航定位研究、机械臂的运动学和动力学研究、机器视觉开发、5G远程通信应用等关键技术。该平台还支持采用MATLAB/Simulink和ROS联合开发,支撑相关科研人员在该平台上进行深度学习、自动驾驶、机器人移动作业等人工智能的应用研究。

01 采用工业结构设计,核心器件符合工业标准,适合建筑场景应用;
02 基于模块化设计,结构紧凑,功能丰富;
03 模块均采用自主开源化的框架,可自由进行单独或融合算法研究;
04 采用MATLAB/Simulink和ROS进行算法开发研究,能够适应大部分科研人员的研究基础;
05 提供大量的Demo算法及实验案例,供用户在更深层次上的学习和研究;
06 产品可进行二次开发,预留开发接口,提供全方位的技术支持;
07 使用高性能计算机作为主控系统,满足大量数据的处理运算需求;
08 也可用于自动驾驶、智能物流仓储、智能识别、安防巡检等领域的研究及应用。
开源自动扎钢筋平台的应用案例
01、多钢筋交叉点识别定位
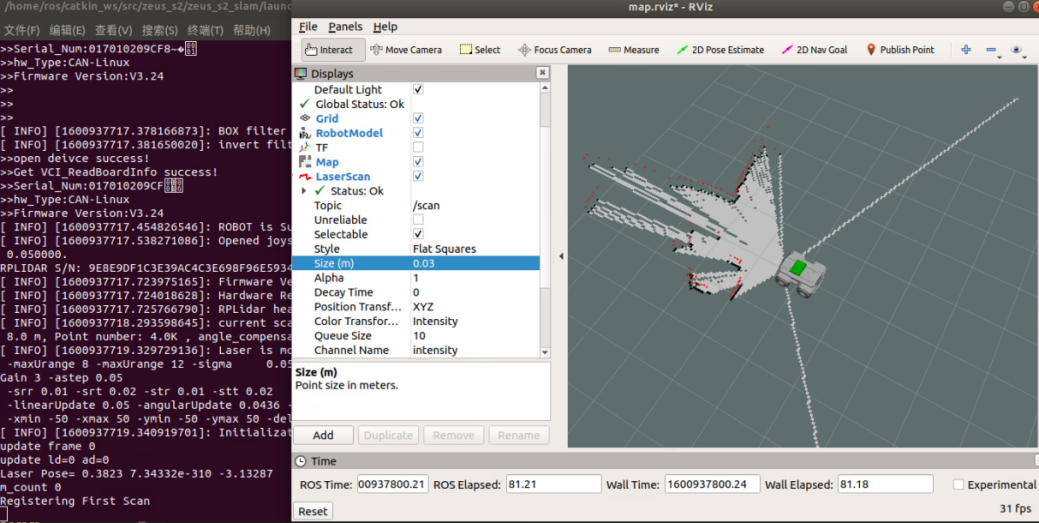
03、ROS下的SLAM定位导航
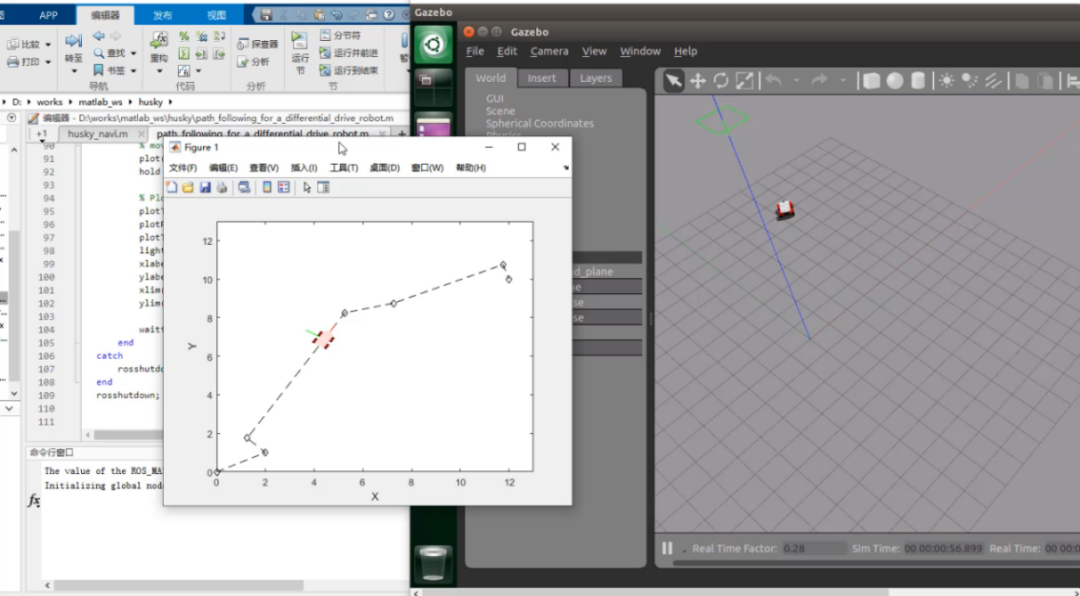
04、Matlab/Simulink与GAZEBO联合仿真
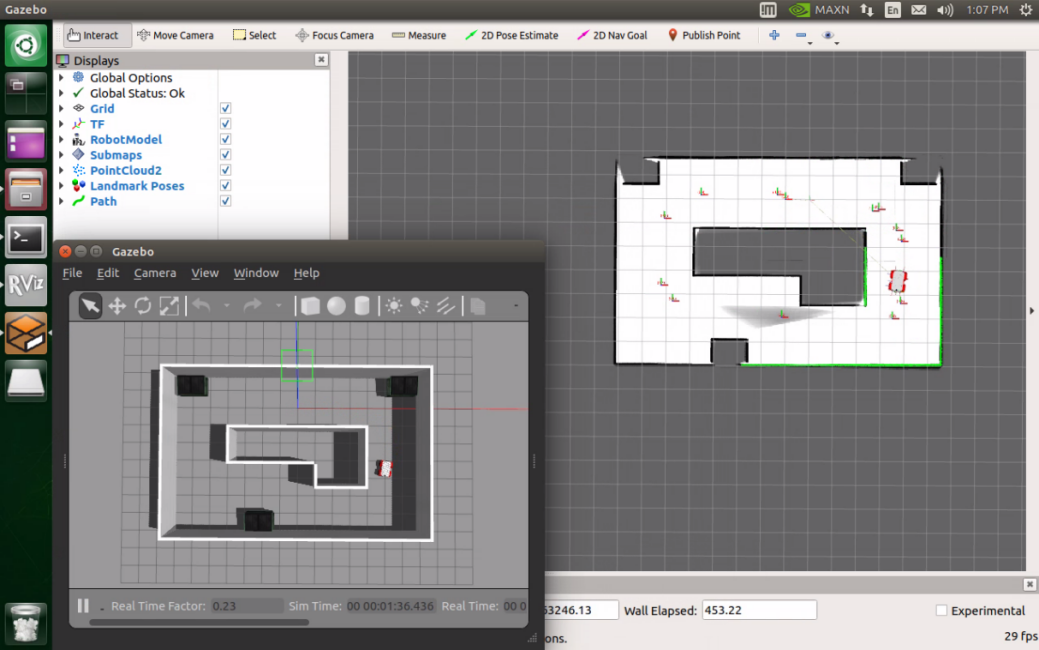
05、ROS下定位导航仿真
02
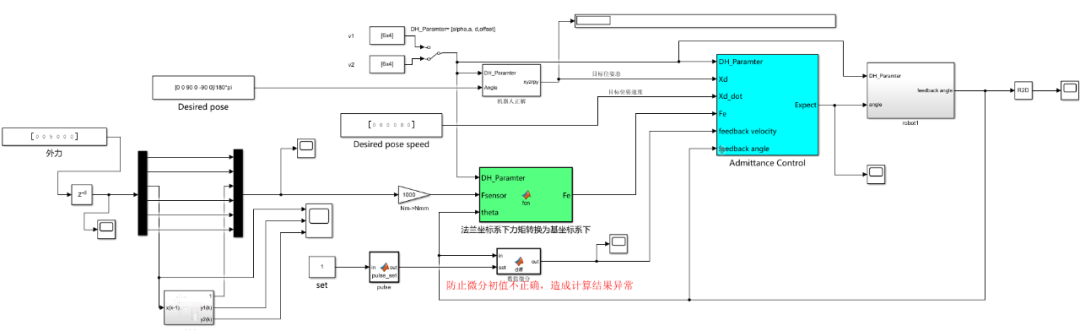
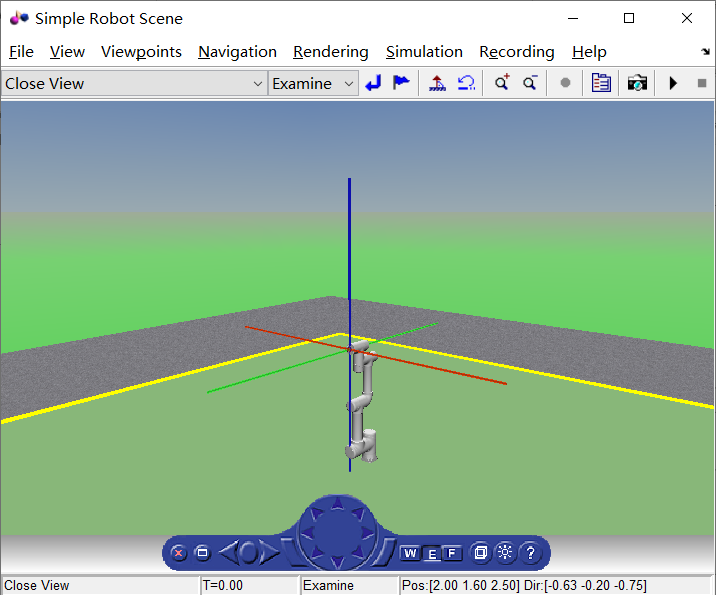
智能机器人协作铺砖系统
该方案通过采用CSPACE实时仿真控制系统,针对复杂的智能铺地砖机器人,构建精确的系统控制模型,以XY模组代替机器人移动的脚,节卡协作机械臂代替人工的手,视觉系统代替人的眼睛,控制系统代替人的大脑,整套系统完美模拟了建筑工人在实际建筑工作中的场景。工人从瓷砖盒里拿瓷砖,再抹灰,搬送到贴瓷砖处,轻轻放下,检查瓷砖贴入位置,最后轻压瓷砖的动作,确保瓷砖整齐严实。最大程度实现了智能建筑的工业化、智能化、柔性化、数字化。

智能机器人协作铺砖系统是基于CSPACE实时仿真控制系统和MATLAB/Simulink开发的教科研平台。其由机械臂本体(6个机械臂关节及其连杆和底座)、控制系统、铺砖工具、上位机和稳压电源组成。每个机械臂关节由谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器和伺服驱动器组成。
智能机器人协作铺砖系统的特点和优势
01 开源成熟工业机械臂产品为实验载体,支撑机器人建模仿真、机器人运动学及控制、机器人动力学及控制等教学实验,以及科研领域的算法验证实验和打磨等高级应用的控制实验等;
02 控制器采用CSPACE进行开发,提供EtherCAT或CAN总线通讯接口可供选型,控制周期可以小到1ms。CSPACE操作系统版硬件基于ARM Cortex-A9,性能优良,运算能力强,采用Matlab/Simulink软件进行编程开发,可以更好更快地研究高级自动控制算法;
03 开源视觉系统:开源视觉系统使用Intel RealSense D435或D435i深度相机。该相机提供了多种语言版本的SDK,算法上可使用开源的OpenCV库进行开发,能够满足该项目的教科研需求;
开源视觉系统使用Intel RealSense D435或D435i深度相机。该相机提供了多种语言版本的SDK,算法上可使用开源的OpenCV库进行开发,能够满足该项目的教科研需求;
04 完善的系统开放性及定制能力,丰富的软硬件接口,支持EtherCAT、CAN、Ethernet等多种通讯方式采用研究人员自主的控制系统进行控制,也可以用系统自带的Simulink和ROS进行系统的开发;
05 提供丰富的应用场景:单臂操作,柔顺控制,力控装配,智能示教,柔顺拖动等。智能建造是建筑业转型升级的必然要求,发展智能建造,意义重大。
未来,中科深谷将全力加速机器人的研发和产业化应用,以先进技术、丰富的实践经验为建筑行业高质量发展注入新动力。并将建筑业等产业装备设备的硬件、软件、算法等开源开放出来,努力推动教育与产业的融合发展!


