

“传统+科技”!中科深谷按摩理疗机器人赋能理疗行业转型升级
发布日期:2023-08-01 浏览次数:3621
PART 01
背景
随着工作和生活节奏的加快,受亚健康、慢病、运动损伤等问题困扰的群体越来越年轻化,加之后疫情时代的人们更加注重健康管理,由此引发的按摩理疗需求大幅上升。
但是目前,健康理疗服务行业主要以按摩、针灸、艾灸等传统中医理疗项目为主,极为依赖理疗师个人手艺、技师培养周期长、流失率高等问题,因而,打破行业“瓶颈”的关键之处,是将产品和服务标准化,形成智能化的解决方案。
PART 02
解决方案
中科深谷自主研发的开源按摩理疗机器人,在不改变现有理疗、康养环境的基础上,可完成人体个性化经络、穴位识别。根据大数据与人工智能算法,智能推荐理疗方案,解放人工,实现理疗过程的自动化,让按摩理疗机器人像理疗专家的双手一样,实现精准穴位、精准力控的智能化理疗。

按摩理疗过程智能化源于“手、脑、眼”的配合,是精确度和压力施加之间的微妙相互作用,是使用机器人实现的理想选择。而中科深谷的开源按摩理疗机器人搭载自主研发的开源六轴机械臂、六维力传感器,带有开源的采用六维力传感器的导纳控制算法和实时控制实验,以及3D结构光视觉系统,能实现通过3D视觉系统扫描待按摩理疗的人体部位,通过开源的六轴机械臂控制系统,研发轨迹生成算法,实现按摩理疗,并能控制力度。通过末端温度传感器,监测按摩理疗部位的温度,进行智能化的按摩理疗。
开源按摩理疗机器人,是创新柔性控制和先进机器视觉技术完美融合!借助柔性控制系统调节按摩力度,机器视觉技术感知技术定位按摩部位,让每一次按摩都成为专业级的舒缓护理。
PART 03
产品特点与技术优势
产品特点
01 开源成熟工业机械臂产品为实验载体,支撑机器人建模仿真、机器人运动学及控制、机器人动力学及控制等教学实验,以及科研领域的算法验证实验和打磨等高级应用的控制实验等。
02 控制器提供 EtherCAT 或 CAN 总线通讯接口可供选型,控制周期可以到 1ms。采用 Matlab/Simulink 软件进行编程,可以更好更快地研究高级自动控制算法。
03 单关节模组伺服驱动器自主开发,性能优异、开放电流、速度、位置三环控制、支撑高级动力学算法研究。
04 提供丰富的机械臂运动学、动力学控制案例,提供 Simulink 的软件仿真程序和实验,方便地掌握机械臂控制系统的技术,进行更深入的研究。
05 可进行参数辨识、柔顺控制、拖动示教、碰撞保护等高级动力学算法和机器人关键技术的开发。
技术优势
01 高精度、高响应力控,柔顺贴合及人体跟随
深度相机精度能达到距离的2%;六轴协作机械臂3kg负载,能实现0.5mm内的精密定位控制,重复定位精度可达±0.02mm;六维力传感器的扭矩±8Nm 力:200N 线性度为1%。
02 3D视觉、先进AI结合力探测,精准识别
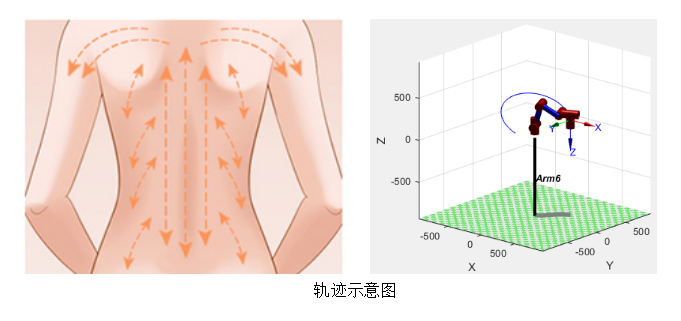
3D视觉识别出待按摩理疗的部位,在线计算机械臂运动轨迹,然后把轨迹发给机械臂控制器,执行对应的轨迹运动。模拟人手对待按摩理疗的部位进行按压,通过刚度检测,精准判断可按摩区域。
03 高级力控算法,软硬件全开源
高级力控算法和软件,能实现阻抗和导纳等运动控制;开源视觉识别和处理软件、机械臂定位控制软件、机械臂轨迹规划控制示例软件、视觉引导机械臂定位控制。
开源按摩理疗机器人利用机器人和AI技术来改善人们的日常生活,是未来大趋势。开源按摩理疗机器人于理疗、按摩等康养行业场景的应用中已愈发成熟,正逐步打破着传统健康理疗机构规模化扩张过程中的困境,智能康养升级的浪潮正逐渐拉开序幕。
未来,中科深谷将持续研发创新,将工业等产业装备的硬件、软件、算法等开源开放出来,秉持开源开放、技术创新,产学研用通力融合,努力推动人工智能·机器人技术的高速发展及产业应用。


